

Системы стабилизации скорости вращения электродвигателей электронных средств. учебное пособие. Кондусов В.А
.pdfФГБОУ ВПО «Воронежский государственный технический университет»
В.А. Кондусов
СИСТЕМЫ СТАБИЛИЗАЦИИСКОРОСТИ ВРАЩЕНИЯЭЛЕКТРОДВИГАТЕЛЕЙ ЭЛЕКТРОННЫХСРЕДСТВ
Утверждено Редакционно-издательским советом университета в качестве учебного пособия
Воронеж 2014
УДК 621.313
Кондусов В.А. Системы стабилизации скорости вращения электродвигателей электронных средств: учеб. пособие [Электронный ресурс]. – Электрон. текстовые и граф. данные (4,81 Мб) / В.А. Кондусов. – Воронеж: ФГБОУ ВПО «Воронежский государственный технический университет», 2014. – 1 электрон. опт. диск (CD-ROM): цв. – Систем. требования: ПК 500 и выше; 256 Мб ОЗУ; Windows XP; SVGA с разрешением 1024х768; Adode Acrobat ; CD-ROM дисковод; мышь. – Загл. с экрана. – Диск и сопровод. материал помещены в контейнер 12х14 см.
Учебное пособие посвящено рассмотрению и анализу схемных решений систем автоматической стабилизации скоростей вращения микроэлектродвигателей, применяемых в конструкциях бытовой техники на протяжении последних десятилетий, используемых как в отечественных, так и зарубежных разработках.
Издание соответствует требованиям Федерального государственного образовательного стандарта высшего профессионального образования по направлениям 211000.62 «Конструирование и технология электронных средств» (профиль «Проектирование и технология радиоэлектронных средств») и 200100.62 «Приборостроение» (профиль «Приборостроение»), дисциплинам «Физические процессы электромеханических систем электронных средств» и «Физические процессы в электромеханических устройствах и приводах».
Табл. 6. Ил. 103. Библиогр.: 29 назв.
Рецензенты: кафедра информатики и вычислительной техники Международного института компьютерных технологий (зав. кафедрой канд. техн. наук, проф. И.Н. Крючкова); д-р физ.-мат. наук, проф. Ю.Е. Калинин
©Кондусов В.А., 2014
©Оформление. ФГБОУ ВПО
«Воронежский государственный технический университет, 2014
ВВЕДЕНИЕ
Требования к повышению качества разрабатываемых электронных средств постоянно растут. Во многих случаях качественные характеристики этих устройств определяются стабильностью скорости вращения используемых электродвигателей. Например, точность поддержания постоянства скорости вращения электродвигателя проигрывателя компактдисков, дисковода компьютера, несмотря на износ и изменение характеристик электродвигателя и вариацию других параметров. В зависимости от требований, предъявляемых к той или иной разрабатываемой системе важно правильно подойти к выбору регулятора скорости, обеспечивающего заданную точность регулирования.
Практическая ценность пособия состоит в том, что в нём представлена информация по большому количеству практических систем автоматического регулирования (САР) скорости ведущих двигателей, применяемых в бытовой технике как отечественного, так и зарубежного производства, что позволит студентам глубже понять теорию, практику, а также схемотехнику систем с обратной связью.
Пособие является дополнительным материалом по курсу «Физические процессы электромеханических систем электронных средств» для студентов специальности «Проектирование и технология РЭС», а также может быть
использовано и при изучении курса «Системы автоматического управления», относящегося к этой же специальности.
Анализ учебной и научно-технической литературы по данной тематике позволил сделать вывод об отсутствии печатных изданий, в которых приводилось бы достаточно большое количество примеров схемных решений практических систем автоматического регулирования, что и послужило исходной предпосылкой для написания настоящего учебного пособия.
3
1. ВВЕДЕНИЕ В СИСТЕМЫ УПРАВЛЕНИЯ
1.1. Общие понятия
Теория автоматического управления (ТАУ) появилась во второй половине 19 века сначала как теория регулирования. Широкое применение паровых машин вызвало потребность в регуляторах, то есть в специальных устройствах, поддерживающих устойчивый режим работы паровой машины. Это дало начало научным исследованиям в области управления техническими объектами. Оказалось, что результаты и выводы данной теории могут быть применимы к управлению объектами различной природы с различными принципами действия. В настоящее время сфера ее влияния расширилась на анализ динамики таких систем, как экономические, социальные и т.п. Поэтому прежнее название “Теория автоматического регулирования” заменено на более широкое - “Теория автоматического управления”.
Управление каким-либо объектом (объект управления будем обозначать ОУ) есть воздействие на него в целях достижения требуемых состояний или процессов. В качестве ОУ может служить самолет, станок, электродвигатель и т.п. Управление объектом с помощью технических средств без участия человека называется автоматическим управлением. Совокупность ОУ и средств автоматического управления называется системой автоматического управления (САУ).
Основной задачей автоматического управления является поддержание определенного закона изменения одной или нескольких физических величин, характеризующих процессы, протекающие в ОУ, без непосредственного участия человека. Эти величины называются управляемыми величинами. Если в качестве ОУ рассматривается электродвигатель, то управляемой величиной будет скорость вращения электродвигателя, которая должна изменяться по заданной программе в соответствии с требованиями,
4
предъявляемыми к данной системе.
Техника управления – это очень увлекательная и творческая область деятельности. По своей сути она является междисциплинарным предметом и играет роль стержневого курса в учебных планах технических университетов. Естественно ожидать различных подходов к овладению искусством техники управления и ее практическому применению. Поскольку этот предмет имеет солидные математические основы, им можно овладевать строго теоретически, делая акцент на формулировку и доказательство различных теорем. С другой стороны, т. к. конечной целью является практическая реализация регуляторов в реальных системах, то при синтезе таких систем допустим и специфический метод, в основе которого лежат интуиция и личный опыт.
Цель данного учебного пособия — представить четкую структуру систем с обратной связью.
Рассмотрим в общих чертах процесс синтеза системы управления, т. е. системы определенного назначения, состоящей из взаимосвязанных элементов. Для понимания целей систем управления полезно будет обратиться к некоторым примерам таких систем, появлявшихся в различные исторические эпохи. Эти самые первые системы управления работали по тому же принципу обратной связи, который используется и в наше время.
Проектирование современных систем управления позволяет среди многих других задач решать и такие, как совершенствование производственных процессов, повышение эффективности использования энергии, оптимизация управления автомобилем путем регулирования скорости. Разберем эти интересные с практической точки зрения приложения техники управления.
Прикладные науки занимаются изучением предметов материального мира и сил природы и управлением ими в интересах человечества. Сходные задачи решают и инженеры,
5

занимающиеся проектированием систем управления. Разница лишь в том, что для инженера представляют интерес фрагменты окружающей его обстановки, часто называемые просто системами, а его целью является производство товаров и услуг, приносящих пользу обществу. По-видимому, наиболее яркая особенность техники управления – это возможность целенаправленного воздействия на механизмы, производственные и экономические процессы в интересах общества.
Техника управления базируется на теории обратной связи и анализе линейных систем; она включает в себя также основные положения теории цепей и теории связи. Поэтому она не ограничивается только какой-то одной технической дисциплиной, а в равной степени применима к аэронавтике, химической технологии, механике, экологии, строительству, электротехнике. Очень часто, например, система управления включает в себя элементы электрической, механической и химической природы. Более того, по мере более глубокого понимания динамики бизнеса, социальных и политических процессов будет повышаться и способность управления этими процессами.
Система управления — это соединение отдельных элементов в определенную конфигурацию, обеспечивающую заданные характеристики. В основе ее анализа лежит теория линейных систем, предполагающая наличие причинноследственных связей между элементами. Поэтому процесс или объект, подлежащий управлению, может быть представлен в виде блока, изображенного на рис. 1.1.
Рис. 1.1. Объект управления
6

Связь между входом и выходом — это, по сути, преобразование одного сигнала (причины) в другой (следствие), причем довольно часто с усилением мощности.
1.2. Основные принципы управления
Принято различать три фундаментальных принципа управления состоянием ОУ: принцип разомкнутого управления, принцип компенсации, принцип обратной связи.
1.2.1.Принцип разомкнутого управления
Вразомкнутой системе управления для получения желаемой реакции объекта обычно используется регулятор или исполнительное устройство, как показано на рис. 1.2. В разомкнутой системе обратная связь отсутствует. В разомкнутой системе для непосредственного управления объектом применяется специальное исполнительное устройство, а обратная связь отсутствует. Принцип разомкнутого управления состоит в том, что программа управления жестко задана и управление не учитывает влияние возмущений на параметры процесса. Управление осуществляется без контроля результата. Такое управление называется жёстким. Примерами систем, работающих по принципу разомкнутого управления, являются часы, магнитофон, компьютер и т.п.
Рис. 1.2. Разомкнутая система управления (без обратной связи)
На рис. 1.3 представлена схема системы регулирования числа оборотов электродвигателя постоянного тока, работающая по принципу разомкнутого цикла.
7
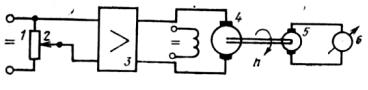
Рис. 1.3. Схема системы регулирования числа оборотов электродвигателя постоянного тока, работающая по принципу разомкнутого цикла
В системе разомкнутого цикла управляющее воздействие перемещает движок 2 потенциометра 1 и изменяет напряжение на входе усилителя 3. Это приводит к изменению тока в якоре электродвигателя 4, что вызывает изменение его угловой скорости. Последняя измеряется при помощи тахогенератора 5 и стрелочного прибора 6. Следует отметить, что операцию управления (перемещение движка 2 потенциометра 1) может осуществлять также человек. В этом случае управление будет ручным.
Схема не имеет замкнутого пути обхода, т. е. является разомкнутой. Для нормального функционирования систем разомкнутого цикла необходимо соблюдение ряда мер. Они должны быть тщательно отградуированы, т. е. каждому положению движка потенциометра 2 должна соответствовать в установившемся режиме определенная частота вращения электродвигателя 4. Однако сохранение градуировки при износе и старении элементов, а также при колебаниях температуры и т. д. представляет трудную задачу. Поэтому системы, работающие по принципу разомкнутого цикла, не могут обеспечить высокую точность. В них не измеряется результат, вызываемый управляющим воздействием, т. е. перемещением движка, и не осуществляются действия, влияющие на этот результат с тем, чтобы он соответствовал желаемому.
8

1.2.2. Принцип обратной связи
Принцип обратной связи получил наибольшее распространение в технических системах с управлением по замкнутому циклу. В отличие от разомкнутой, в замкнутой системе производится измерение действительного значения выходного сигнала, которое затем сравнивается с его желаемым значением. Измеренное значение выхода называют сигналом обратной связи. Простейшая замкнутая система управления изображена на рис. 1.4.
Рис. 1.4. Замкнутая система управления (с обратной связью)
Замкнутая система стремится поддержать заданное соотношение между двумя переменными путем сравнения функций от этих переменных и использования их разности в качестве управляющего сигнала. Чаще всего разность между заданным значением выходной переменной и ее действительным значением усиливается и используется для воздействия на объект управления, в результате чего эта разность постоянно уменьшается. Принцип обратной связи лежит в основе анализа и синтеза систем управления.
В замкнутой системе производится измерение выходной переменной и его результат в виде сигнала обратной связи сравнивается с эталонным входным сигналом, несущим информацию о заданном значении выходной переменной.
Система замкнутого цикла (см. рис. 1.5) отличается от системы разомкнутого цикла тем, что выходное напряжение тахогенератора 5 сравнивается с напряжением, которое снимается с потенциометра.
9

Рис. 1.5. Схема системы автоматического регулирования числа оборотов электродвигателя постоянного тока,
работающая по принципу замкнутого цикла
Если угловая скорость электродвигателя постоянного тока отличается от заданной, то возникает сигнал ошибки ΔU = Un — Uтг. Этот сигнал усиливается и передается на якорь электродвигателя. При этом сигнал ошибки уменьшается до допустимой величины, а угловая скорость возвращается к заданному значению. Принцип управления, основанный на использовании обратной связи, ценен тем, что не требует точной градуировки и сохраняет свою точность и в тех случаях, когда параметры элементов системы со временем изменяют свои значения.
Внекоторых случаях оба принципа управления (по разомкнутому и замкнутому циклам) используются в сочетании друг с другом.
Всистемах с замкнутым циклом или с обратной связью точность регулирования, т. е. точность поддержания требуемой функциональной связи (чаще всего пропорциональной) между входом и выходом, в основном зависит от точности, с которой производится сравнение требуемого и действительного изменения регулируемой переменной.
Итак, системой автоматического регулирования (САР) называется динамическая система, стремящаяся сохранять в допустимых пределах отклонения между требуемыми и
10