

Методическое пособие 703
.pdfРис. 2.37. Стабилизированный регулятор частоты вращения
Когда движок резистора находится в положении максимального сопротивления, частота вращения якоря минимальна. По мере перемещения движка влево увеличивается ток через светодиод оптрона, а значит, длительность открытого состояния тиристора возрастает, увеличивая тем самым средний ток через обмотку электродвигателя. Частота вращения якоря возрастает.
Если при заданной резистором частота вращения во время работы двигателя нагрузка на вал возрастёт, обороты якоря электродвигателя неизбежно начнут падать. Но зато начнёт возрастать переменный ток через первичную обмотку трансформатора Т2, в результате чего увеличится напряжение на его вторичной обмотке. Возрастёт общее напряжение, поступающее на диодный мост, а следовательно, увеличится ток через светодиод оптрона. Это приведёт к более раннему открыванию тиристора оптрона во время полупериода сетевого напряжения, что эквивалентно повышению мощности электродвигателя – частота вращения его якоря стабилизируется.
Когда же нагрузка на вал уменьшится, снизится переменное напряжение на вторичной обмотке трансформатора Т2, что приведёт к сохранению частоты вращения якоря электродвигателя. Так происходит стабилизация заданного переменным резистором режима работы.
На рис. 2.38 представлена схема регулятора-
121

стабилизатора частоты вращения коллекторного двигателя.
Рис. 2.38. Регулятор-стабилизатор частоты вращения коллекторного двигателя
С помощью регулятора представленного на рисунке 2.38 частоту и момент вращения можно изменять и поддерживать в интервале от нуля до максимальных, развиваемых двигателем. Режим уменьшенного вращения двигателя удобен, например, для ограничения натяжения провода в намоточном станке или для предотвращения поломки режущего инструмента в случае его заклинивания в обрабатываемом материале. В приборе реализован алгоритм пропорционально интегрирующего регулятора.
На рис. 2.39 представлена схема регулятора оборотов коллекторного двигателя .
В схеме изображённой на рис. 2.39 применён метод стабилизации частоты вращения, основанный на измерении противо ЭДС его ротора.
При резком изменении частоты вращения, вызванном изменившейся механической нагрузкой, напряжение на резисторе R17 превышает напряжение открывания одного из диодов и он шунтирует резистор, что приводит к многократному уменьшению постоянной времени интегратора. Это обеспечивает быструю реакцию регулятора на дестабилизирующие факторы. При завершении переходного
122

процесса интегратор снова работает с большой постоянной времени.
Рис. 2.39. Регулятор оборотов коллекторного двигателя
На рис. 2.40. представлена схема регулятора частоты вращения мощного двигателя. Регулировать частоту вращения электродвигателя постоянного тока можно изменяя на нем напряжение при помощи простейшего регулятора собранного на одном транзисторе. Это обстоятельство легко реализуется для маломощных электродвигателей так как потребляемый ток небольшой.
Рис. 2.40. Регулятор частоты вращения мощного двигателя
123
А вот если возникнет необходимость регулировать напряжение для достаточно мощного двигателя то мощность рассеивания на транзисторе может стать значительной и придется применять большие радиаторы да и видимо достаточно мощные транзисторы. Известен и еще один способ регулирования напряжения на двигателе методом фазовоимпульсной модуляции. На двигатель подается полное напряжение с изменяемой скважностью. Простейший способ изменять скважность импульса при неизменной частоте, это воспользоваться преобразователем напряжение-фаза выполненном на интегральном таймере КР1006ВИ1. Частоту генератора можно изменять в широких пределах емкостью C1. Для улучшения открытия транзистора VT1 возможно уменьшить сопротивление резистора R3 до 56-120 Ом, необходимо только следить чтобы ток нагрузки по выводу 3(D1) не превышал 100 ма. Напряжение питания устройства можно менять в широких пределах от 4,5 до 16,5 вольт.
На рис. 2.41 представлена схема микроконтроллерного регулятора скорости электродвигателя. Данный регулятор скорости основан на микроконтроллере PIC 16F84. В настоящее время более тридцати зарубежных фирм выпускают микроконтроллеры массового применения с разрядностью 8 бит, недорогие и пригодные для использования в самых разнообразных приложениях. Однако именно микроконтроллеры серии PIC фирмы Microchip® Technology Inc. переживают последние три-четыре года в России поистине взрывной рост популярности. Эти микроконтроллеры также крайне популярны во всем мире, как у производителей электронной техники, так и среди радиолюбителей. Микроконтроллеры PIC фирмы Microchip объединили в себе все передовые технологии, применяемые в производстве микроконтроллеров: развитую RISC-архитектуру, минимальное энергопотребление при высоком быстродействии, ППЗУ, программируемое пользователем, функциональную
124
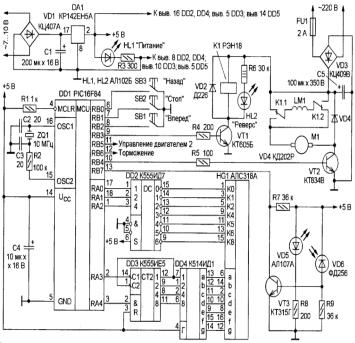
законченность. Четкая и продуманная внутренняя структура контроллеров и небольшая, но мощная система команд с интуитивно понятной мнемоникой значительно облегчают процесс изучения контроллеров PIC и написание для них программ.
Рис. 2.41. Микроконтроллерный регулятор частоты вращения электродвигателя
В устройстве использован импульсный метод регулирования напряжения в цепях постоянного тока, получивший широкое распространение, в качестве привода различных электроприборов, в том числе и бытовых.
Суть метода заключается в том, что напряжение на двигатель подается импульсами с большой частотой следова-
125

ния посредством бесконтактного ключевого элемента. В течение импульса продолжительностью tи.
Рис. 2.42. Зависимость напряжения от продолжительности
В данном устройстве реализован следующий набор выполняемых функций:
- регулирование частоты вращения изменениемкоэффициента заполнения К., в интервале от 0 до 100% с шагом 2 %. Механическая характеристика электропривода (зависимость частоты вращения от момента на валу) при этом
126
мягкая: с ростом нагрузки частота вращения снижается, что защищает электродвигатель и источник питания от перегрузок;
-поддержание заданной частоты вращения с точностью ±5 % c использованием принципа замкнутого управления по отклонению: фактическое значение частоты вращения сравнивается с заданным, и при наличии отклонения программно изменяется Кз, до устранения возникшего отклонения;
-изменение направления вращения вала (реверс) электродвигателя;
-формирование сигнала на включение тормозного элемента при остановке привода;
-автоматическое отключение электродвигателя по
сигналам датчиков аварийного режима (при использовании таковых), а также при сбоях в выполнении программы;
-возможность управления двумя электродвигателями с временным сдвигом импульсов питающею напряжения;
-учет и хранение в энергонезависимой памяти МК информации о суммарном времени работы привода;
-визуальная индикация выбранного алгоритма управления (со стабилизацией частоты вращения или без нее) и направления вращения, а также величин коэффициента заполнения, заданной и фактической частот вращения.
В конкретных применениях некоторые из названных функций могут не использоваться.
Принципиальная схема устройства управления электродвигателем изображена на рис. 2.41. Его основа — МК DD1, работающий на тактовой частоте 10 МГц. Органами управления являются кнопки SB1 ("Вперед"), SB2 ('Стоп") и SB3 ("Назад"), подсоединенные к разрядам RBO—RB2 порта В МК. Параллельно кнопке SB2 при необходимости можно подключить выход датчика тока нагрузки, который при превышении установленного токового порога будет отключать привод от источника питания [5].
127
Вкачестве ключевого элемента применен мощный составной транзистор КТ834В (VT2). Благодаря большому коэффициенту передачи тока базы управление им осуществляется непосредственно напряжением с выхода RB4 порта В через токоограничительный резистор R5.
Программой управления предусмотрена возможность одновременного управления вторым электродвигателем с подсоединением входа аналогичного ключевого элемента к выводу RB5. При этом с целью уменьшения пульсаций тока в цепи источника импульсы напряжения для второго двигателя формируются с временным сдвигом, равным продолжительности импульса tи , как показано на рис. 2.42.
Вкачестве ключей в устройстве можно применить мощные полевые или гибридные силовые транзисторы с подключением цепей управления непосредственно к выводам МК [2], что позволяет использовать регулятор в силовых электроприводах мощностью до сотен киловатт, например, в электрифицированных транспортных средствах.
Реверс электродвигателя осуществляется изменением направления тока в обмотке возбуждения электродвигателя LM1 с помощью переключающих контактов реле К1. Его обмотка включена в коллекторную цепь транзистора VT1, управляемого напряжением с вы хода RВЗ МК.
Врегуляторе применено реле РЭН18 (паспорт РХ4.564.505) с четырьмя переключающими контактами (для повышения надежности в каждой из групп К1.1 и К1.2 параллельно соединены по два контакта). Переключение контактов происходит при обесточенном электродвигателе (К = 0), что существенно снижает требования к их коммутационной способности.
Взависимости от номинального тока электродвигателя для переключения обмотки возбуждения может потребоваться применение более мощного коммутационного устройства. При управлении нереверсивным электроприводом необходимость в использовании указанных элементов вообще отпадает
128
Программой предусмотрено формирование на выходе RB6 МК сигнала, включающего тормозной элемент для быстрой остановки привода при выключении либо для ограничения частоты вращения в режиме стабилизации при отрицательных нагрузках на валу электродвигателя. Если такого элемента нет, указанный сигнал просто не используют. На вывод RB7 поступают импульсы or фотоэлектрического датчика частоты вращения. Он состоит из излучающего диода ИК диапазона VD5, фотодиода VD6, усилителя на транзисторе VT3 [3] и закрепленного на валу электродвигателя диска с двумя диаметрально расположенными отверстиями диаметром около 10 мм. При вращении вала ПК лучи дважды за один оборот на короткое время освещают фотодиод, и в цепи коллектора транзистора W3 формируются импульсы напряжения. Поступая на вход RB7, они вызывают прерывания МK от порта В, По этим прерываниям МК измеряет время каждого оборота вала двигателя и переводит измеренный интервал в частоту вращения, нормированную относительно номинальной в процентах. В данном случае за 100 % принята частота вращения 3000 мин-1
Если коэффициент заполнения достиг нуля (отключение питания), а двигатель продолжает вращаться с угловой частотой, превышающей заданную, МК выдает исполнительному устройству команду на торможение через разряд RB6 порта В.
Настроенный на вывод пятиразрядный порт А используется для управления в динамическом режиме семью разрядами цифрового индикатора HG1 Через разряд ВАЗ на вход С1 двоичного счетчика DD3 поступает информация {в виде соответствующего числа импульсов) об отображаемой десятичной цифре, а через разряд RA4 осуществляется обнуление счетчика. Дешифратор DD4 преобразует двоичный код на выходе счетчика в код семиэлементного индикатора.
С выводов RAO—RA2-MK на адресные входы дешифратора DD2 поступает в двоичном коде номер разряда
129
индикатора HG1, в котором должно отображаться содержимое счетчика DD4. Напряжения на выходах 0- 6 дешифратора последовательно активизируют соответствующие разряды индикатора, обеспечивая отображение семи цифр, а в интервалах формирования напряжения на неиспользуемом выходе дешифратора индикация отключена и производится загрузка отображаемой цифры в счетчик.
При включении устройства происходит автоматический сброс УК и начинается выполнение записанной в его памяти программы. Производится начальная инициализация МК и управляющей программы: настраиваются предделитель таймера/счетчика и линии портов А и В на ввод/вывод, заносятся необходимые начальные константы в используемые переменные разрешаются прерывания oт таймера/счетчика и от изменения уровня входного напряжения в разряде RB7 порта В. После эти; действий программа циклически выводит информацию на цифровое индикатор HG1 и опрашивает состояния кнопок SB1— SB3.
Управление электроприводом может происходить по двум алгоритмам, выбираемым пользователем.
Включен режим стабилизации Пользователь задает необходимую частоту вращения
вала двигателя, а МК несколько раз в секунду измеряет реальную частоту вращения и в зависимости от результата корректирует коэффициент заполнения Кз таким образом, чтобы поддерживать заданную частоту независимо от перепадов питающего напряжения и изменения момента сопротивления на валу электродвигателя.
Для включения режима стабилизации необходимо при остановленном приводе нажать одновременно кнопки SB2 ("Стоп")и SB1 ("Вперед"), для выключения—SB2("Стоп") и SB3 ("Назад").На индикатор в этом режиме выводится информация вформате5_ХХХ_YYMгде5 признак того, что МК работает в режиме стабилизации, XXX — текущий коэффициент заполнения в процентах от 0 до 100 % с шагом 2%,
130