

Многомерные системы автоматического управления. Учебное пособие. Литвиненко А.М., Машаров А.В
.pdfМИНИСТЕРСТВО ОБРАЗОВАНИЯ РОССИЙСКОЙ |
|
ФЕДЕРАЦИИ |
Воронеж 2004 |
|
УДК 658.52.011.56.012.3.005:658.012.011.56 |
Воронежский государственный технический |
|
университет |
Литвиненко А.М., Машаров А.В. Многомерные системы |
|
автоматического управления: Учеб. пособие. Воронеж: Воро- |
|
неж. гос. техн. ун-т, 2004. 169 с. |
|
В учебном пособии изложены основы теории много- |
А.М. Литвиненко А.В. Машаров |
мерных систем автоматического управления. |
|
Учебное пособие предназначено для студентов, обучаю- |
МНОГОМЕРНЫЕ СИСТЕМЫ АВТОМАТИЧЕСКОГО |
щихся по специальности ?????? ―Управление и информатика в |
УПРАВЛЕНИЯ |
технических системах‖ при изучении курса ―Системы управ- |
|
ления роботами‖ для дневной формы обучения. |
|
Учебное пособие подготовлено на магнитном носителе в |
|
текстовом редакторе MS WORD97.0 и содержится в файлах |
Утверждено Редакционно-издательским |
―ВВЕДЕНИЕ.doc‖, ―ГЛАВА 1.doc‖, ―ГЛАВА 2.doc‖, ―ГЛАВА |
советом университета в качестве |
3.doc‖, ―ГЛАВА 4.doc‖. |
учебного пособия |
|
|
Табл. 1. Ил. 50. Библиогр.: 37 назв. |
|
Научный редактор, д-р, техн. наук, проф. В.Л.Бурковский |
|
Рецензенты: НИИ Механотроника-Альфа (Ген.директор |
|
канд.техн.наук, Э.Г. Кузнецов) |
|
д-р техн. наук, Ю. С. Сербулов |
|
Издается по решению редакционно-издательского совета |
|
Воронежского государственного технического университета |
©Литвиненко А.М., Машаров А.В.,
2004
©Оформление. Воронежский государственный технический университет, 2004
ВВЕДЕНИЕ
Переход к массовому использованию в промышленности сложных систем автоматического управления ставят перед специалистами по управлению и организации производства ряд новых проблем, решение которых возможно лишь на основе автоматизации. Современные требования к системам автоматического управления отличаются большим разнообразием, возросла сложность решаемых задач управления, все более жесткие требования предъявляются к качественным характеристикам функционирования автоматических систем. Удовлетворение этих требований возможно лишь при дальнейшем расширении функциональных возможностей систем автоматического управления, наделении их свойствами универсальности и гибкости, способностью быстрой адаптации к изменению характеристик, условий работы и свойств объекта управления без непосредственного участия человека.
Так, существенные трудности возникают при наложении дополнительных кинематических связей на движение звеньев исполнительного механизма робота. Это может иметь место, например, при анализе движения манипулятора, кинематическая цепь которого содержит замкнутые контуры, или при выполнении с помощью манипулятора различных механических операций, таких, как сборка, обработка поверхности. Для анализа динамики манипуляционных механизмов в подобных случаях более эффективными оказываются модели движения в форме уравнений
Лагранжа, а также применение принципа наименьшего принуждения Гаусса. Другой причиной, способствовавшей широкому применению этих методов, является поиск подходов, позволяющих получить численные алгоритмы моделирования движения сложных механизмов, наиболее эффективные с точки зрения затрат машинного времени.

ГЛАВА 1 ПРЕДСТАВЛЕНИЕ МЕХАНИЗМОВ И МАШИН ДЛЯ
АВТОМАТИЗИРОВАННОГО МОДЕЛИРОВАНИЯ
Машино-ориентиованное представление исследуемых механизмов является одним из важнейших этапов использования систем автоматизации моделирования. К языку описания механизмов и машин предъявляется ряд, в общем, противоречивых требований, обусловленных сложностью задачи.
Опыт решения практических задач показывает, что представление исследуемых механизмов и поиск допущенных ошибок требуют значительных затрат труда и машинного времени, зачастую превышающих затраты на моделирование. Поэтому язык описания механизмов должен быть близок к естественному языку конструктора.
Рис.
Требование гибкости и расширяемости связано с тем, что априорное определение машинного состава сложных механизмов и машин невозможно. При этом должна быть обеспечена возможность включения новых компонентов.
Исследуемые компоненты являются физически неоднородными, т.е. включают в себя компоненты различной физической природы (механические, гидравлические, электриче-
4
ские и т.д.), поэтому язык описания их должен быть в достаточной степени универсальным.
Возможность расширения связана так же с требованием конструктивности языка, обеспечивающим использование исходной информации алгоритмами моделирования без промежуточных преобразований.
В данной главе излагаются принципы машинноориентиованного представления механизмов и машин на основе естественного компонентного базиса. Соответствующий алгоритмический и программный аппарат осуществляет автоматическое построение и решение алгебраическидифференциальных уравнений, обеспечивает исследование кинематики, статики и динамики.
1.1.Представление объекта в виде механической це-
пи
Современные сложные механизмы и машины, именуемые в дальнейшем сложными механическими машинами (СМС), Могут включать в себя механические, гидравлические, пневматические, электронные и другие компоненты. Соответственно функционирование СМС описывается переменным, связанными с механическими и электронно-магнитными явлениями, свойствами движущейся жидкости и газа.
Характеристика структуры объекта исследования. Рассмотрим основные подсистемы СМС (рис. 1.1). Характер функций, выполняемых СМС (движение, копание, сверление и т.д.), задается управляющими сигналами, поступающими от человека или управляющей системы (блок УС). Эти сигналы воспринимаются силовыми приводами (блок СП) электромеханического или гидропневматического типа, которые оказывают прямое воздействие на исполнительную часть. Исполни-
5

тельная часть, или собственно механическая система (Блок МС), служит для выполнения основных задач СМС. Информация о перемещениях, углах поворота, давлениях и т.п. фиксируется с помощью измерительных устройств (блок ИУ) и поступает в управляющую систему, реализуя обратную связь. Взаимодействие механической системы МС с внешней средой интерпретируется как возмущающее воздействие.
В настоящей работе рассматриваются вопросы автоматизации моделирования СМС, допускающих представление в виде механических цепей. Предполагается, что СМС является совокупностью компонентов, каждый из которых имеет произвольное число связей. Задача
Рис. 1.2
автоматизации моделирования заключается в построении математической модели (системы уравнений) СМС в целом по заданным математическим моделям компонентов и решений системы уравнений.
Рис. 1.4
Механическая цепь CM , соответствующая CMC, задается множеством
CM {K, S,Y}, |
(1.1) |
где К — множество компонентов цепи; S — множество связей всех компонентов из К, именуемых в дальнейшем ветвями цепи; Y — множество узлов цепи, т. е. общих точек связей компонентов.
Граф Г ( CM ) задает топологию механической цепи, т. е.
структуру межсоединений компонентов (рис. 1.2). Цепь содержит l компонентов, т ветвей и k узлов.
Список С ( CM ) вида |
|
|||
|
|
|
Ki , SKi |
,YKi ,i 1,..., l, |
где SK |
i |
S — совокупность ветвей, образованных свя- |
||
|
|
|
|
|
зями компонента SK i ; |
YKi Y |
— совокупность узлов, инци- |
||
дентных этим |
ветвям, |
является основным машинно-ориен- |
||
тированным представлением механической цепи CM .
На каждой связи компонента Ki в общем случае может
действовать произвольный набор переменных, которые характеризуют поведение компонента относительно внешней
части |
цепи. |
Пусть |
компонент |
Ki |
с п |
|
связями |
||
SK1 , SK2 |
,..., SKi ,..., SKn входит в цепь, описываемую Q типами |
||||||||
i i |
i |
i |
|
|
|
|
|
|
|
переменных |
V i ,V 2 ,...,V Q |
(механических, |
гидравлических, |
||||||
электрических, тепловых и т. п.). Каждой связи SKj |
, j |
1,..., m |
|||||||
|
|
|
|
|
i |
|
|
|
|
соответствует |
индексное |
множество |
I j |
{I j ,..., I j |
}, q |
j |
Q |
||
|
|
|
|
|
1 |
q j |
|
|
|
задающее типы переменных, действующих на этой связи. Тогда множество переменных связи SKj i . может быть записано в виде
V[I j ] {V[I j ],V[I j ],...,V[I j ]}. |
(1.2) |
||
1 |
2 |
q j |
|
Механическая цепь CM может задаваться также спи-
ском Ki , Zi , SKi ,YKi ,i 1,..., l,
6 |
7 |
|
где Zi — совокупность внутренних параметров компо-
нента, задающая его геометрические, электрофизические и другие характеристики.
Рис. 1.3
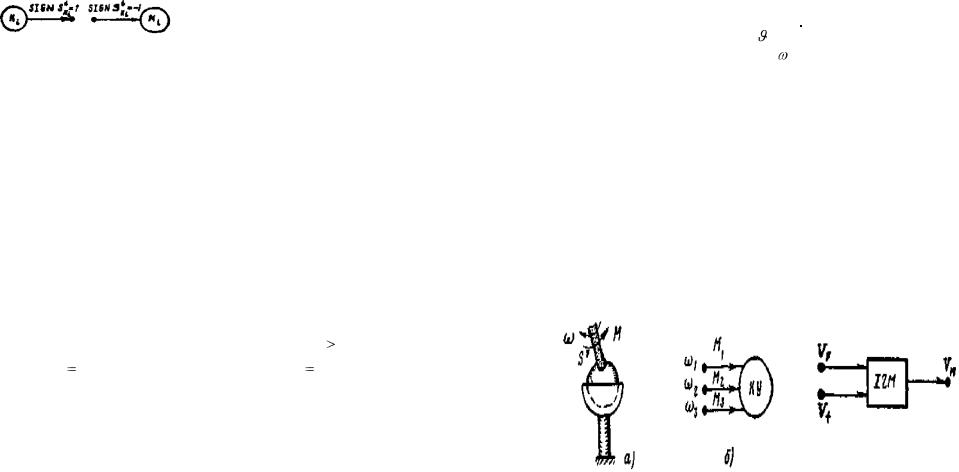
Ветви SK i могут быть ориентированными. Ориентация
задается знаком (SIGN) ветви (рис. 1.3). Предполагается, что связи каждого из компонентов нумеруются в произвольном порядке числами натурального ряда, а затем установленный порядок фиксируется. Нумерация обеспечивает идентификацию переменных связей и определяет порядок перечисления ветвей и узлов в C(CM ) . При построении математических мо-
делей компонентов и их графическом изображении будем полагать, что номер (индексы) переменных связей совпадают с индексами соответствующих связей компонентов.
Классификацию связей можно произвести, исходя из количественных и качественных характеристик (1.2). При этом выделяют следующие классы связей: векторные (qj 2); эле-
ментарные (qj 2) и информационные связи (qj 1) .
|
Дуальные переменные |
||
Вид |
потенциаль- |
|
потоковая |
ная Vp |
|
Vf |
|
связи |
|
||
Механиче- |
Скорость |
|
Сила F (мо- |
ская |
(угловая скорость ) |
мент |
силы М) |
|
Давление Р |
|
Расход Q |
Гидравличе- |
Напряжение U |
|
Ток 1 |
ская Элек- |
|
|
|
трическая |
|
|
|
|
|
|
|
Предполагается, что всякой элементарной связи соответствует пара дуальных переменных (потенциальная Vp и пото-
ковая Vf ), характеризующих процесс передачи энергии. В
табл. 1.1 приведены переменные элементарных связей для механических, гидравлических и электрических цепей.
Рис. 1.5 |
Рис.1. |
|
6 |
8
ружина SPR (рис. 1.4, а) имеет две элементарные связи с потенциальными переменными 1, 2 (скорости) и потоковой
переменной F (сила). ). Гидроемкость G (рис. 1,4, б) имеет единственную связь с потенциальной переменной Р и потоковой переменной Q. Резистор R (рис. 1.4, в) описывается напряжениями U1,U2 и током I.
Векторные связи обычны для компонентов механических цепей с многомерным (плоским или пространственным) движением. Шаровой шарнир KY (рис. 1.5, а, б) имеет единственную векторную связь S , на которой действует множество переменных
, на которой действует множество переменных
V [1] |
{ |
1, |
2 , |
3 , M1, M 2 , M 3}, |
где |
1, |
2 , |
3 |
— угловые скорости; M1 , M 2 , M 3 — мо- |
менты вращения. Векторная связь в данном случае может быть представлена набором элементарных связей (рис. 1.5, б).
На информационных связях компонента-измерителя мощности IZM (рис. 1.6) действуют переменные Vp ,Vf ,Vm ,
которые интерпретируются как потенциальные.
В дальнейшем при графическом представлении CMC будем полагать, что элементарные связи изображаются стрелкой, векторные связи — жирной стрелкой, информационные связи - полустрелкой.
Узлы механической цепи См изображаются точками. Узлы не допускают относительного перемещения связанных с ними компонентов. При формировании математической модели цепи узлам ставятся в соответствие узловые топологические законы:
1) равенство одноименных потенциальных перемен-
ных, действующих на ветвях, инцидентных каждому из узлов;
2) равенство нулю суммы одноименных потоковых пе-
ременных (знак каждой из переменных задается ориентацией ветви).
Рис. 1.7
Рис. 1.8
Применительно к механике узловые топологические законы отображают известный принцип кинетостатики Даламбера.
Модели компонентов и цепей. Представление сложных механических систем с сосредоточенными параметрами в виде механических цепей не вызывает принципиальных затруднений, так как отдельные составляющие систем имеют четко выраженную обособленность на плоскости или в пространстве. Естественный характер переменных связей компонентов позволяет повторить эту структуру путем объединения связей в узлах цепи.
Математическая модель цепи строится на основе известных математических моделей компонентов. Математической моделью М [ Ki ] или просто моделью компонента Ki будем
10
называть совокупность уравнений относительно переменных
связей U V[I j ] этого компонента и записывать в виде |
|
j |
|
M[Ki ] {R1;...; Rp}, |
(1.3) |
где R1;...; Rp — уравнения модели.
Значение p в общем случае не определяется однозначно и зависит от характера конкретного компонента.
Рассмотрим примеры моделей основных типов компонентов механических цепей. Множество компонентов К из выражения (1.1) можно представить в виде
K {TT , KY, DK, EV} , |
(1.4) |
где ТТ — твердые тела; КУ — кинематические узлы; DK
— динамические компоненты; EV — источники потенциальных или потоковых переменных.
В механике используют различные принципы представления моделей этих компонентов. Ниже приведен один из вариантов, реализованный программно на ЭВМ. При этом не исключается возможность других представлений моделей.
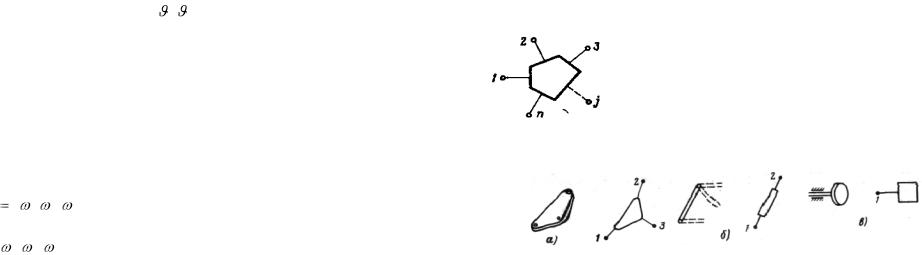
Твердые тела. Рассмотрим абсолютно твердые тела, характеризующиеся постоянной формой, размерами, массой и моментами инерции. Число связей (точек контакта 1,…,j,…,n), твердого тела примем равным числу реально существующих механических связей (рис. 1.7). Так, например, звено механизма, входящее в три кинематические пары (рис. 1.8, а), изображается компонентом с тремя связями 1—3, стержень — компонентом с двумя связями 1, 2 (рис. 1,8 б), вращающееся массивное тело —односвязным компонентом 1 (рис. 1.8, в).
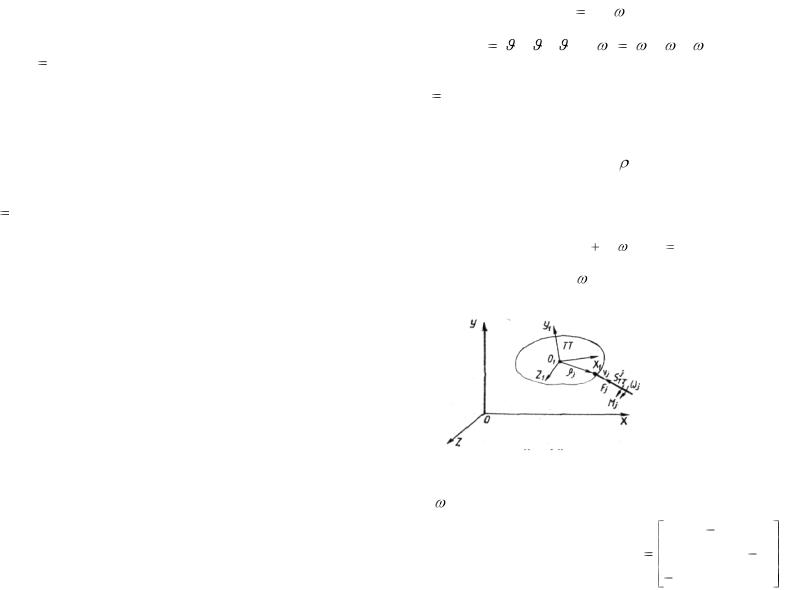
Предполагается, что модель свободного твердого тела описывает движение тела с шестью степенями свободы в связанной с этим телом системе координат X1Y1Z1 (рис. 1.9).
Связи STjT твердых тел — векторные с переменными
Vj {vj , j , M j , Fj }, |
(1.5) |
где Vj [ jX , jY ,
векторов линейной и
M j [M jX , M jY , M jZ ]T
j [ jX , jY , jZ ]T — проекции
угловой скоростей на оси X1,Y1, Z1; - проекции векторов соответственно
сил и моментов сил.
Начало координат O1 системы X1,Y1, Z1 выберем в центре масс тела. Радиус-вектор j - задает точку приложения
произвольной связи STjT . Поступательное движение v0 |
центра |
|||
масс описывается уравнением |
|
|||
m( |
dv0 |
G( j )v0 ) F j |
(1.6) |
|
dt |
||||
|
|
|
||
где т — масса тела; |
j - угловая скорость тела: Fj - век- |
|||
тор сил, действующих на связи STjT .
Рис. 1.9
Кососимметрическая матрица G (d) (в данном случае d  j ) имеет вид
j ) имеет вид
0 d3 d2
G(d ) |
d3 |
0 |
d1 , (1.7) |
d2 d1 0
13
11 |
12 |

где d1, d2 , d3 — проекции вектора d соответственно на
оси X1,Y1, Z1 .
Вращательное движение описывается уравнением Эйле-
ра
J ( |
d |
j |
G( |
j ) j ) M j , |
(1.8) |
|
|
||||
dt |
|
||||
|
|
|
|
|
|
где J — матрица моментов |
инерции тела, M j |
— мо- |
|||
мент внешней силы.
Связь переменных поступательного и вращательного движения задается уравнениями
M j |
G( j )Fj ; |
v0 |
v j G( j ) j . |
Если твердое тело имеет п связей ST1T ,…, STTj , то уравнения движения (1.6), (1.8) можно переписать в виде
|
|
dv0 |
|
n |
|
|
m( |
G( )v0 ) |
Fj ; |
|
|||
dt |
|
|||||
|
|
|
j 1 |
, (1.10) |
||
|
d |
|
|
n |
||
|
|
|
|
|||
J ( |
|
G( ) ) |
(M j G( j )Fj ). |
|
||
|
|
|||||
|
|
dt |
|
j 1 |
|
|
Рис. 1.10
Модель твердого тела (1.10) служит основой для ручного или автоматического построения частных моделей (плоского, вращательного или пространственного движения).
Таблица 1.2
15
14
Кинематические узлы. Соединения твердых тел производят обычно при помощи кинематических пар. Соответствующие компоненты механических цепей будем называть кинематическими узлами (рис. 1.10, а). Кинематический k- узел (узел k-го рода) предоставляет твердым телам k степеней свободы в относительном движении. Векторные связи S1, S2 служат для соединения узла KY со связями твердых тел или других узлов.
На относительное движение при помощи векторной связи S3 могут накладываться динамические ограничения, определяемые трением в узле, упругостью и т. д. Связь S3 кинематического k-узла может быть эквивалентно представлена
совокупностью k элементарных связей S3...S3 |
k |
(рис. 1.10, |
||
б). Примеры кинематических узлов приведены в табл. 1.2. |
||||
На связи S1 действуют переменные V |
{v , F , |
1 |
, M } , |
|
1 |
1 |
1 |
1 |
|
определенные в проекциях на соответствующий координат-
ный базис e ; на связи S2 |
— переменные V2 = {v2, F2, |
2, M2}, |
|
|
1 |
|
|
определенные |
|
|
|
в проекциях на базис е2. На связи S3 действуют перемен- |
|||
ные V3 = |
= {v3 = v2 — vl , F3 = F2 = F1, 3 |
2 1, |
|
M 3 M 2 |
M1 }. |
|
|
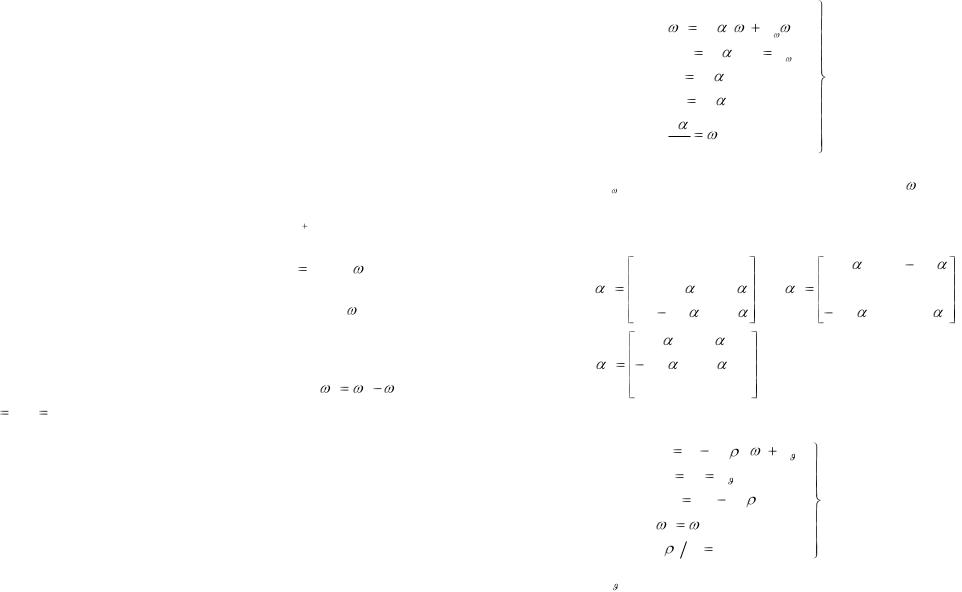
Модель кинематического узла (шарнира вращения) имеет вид
2 |
A( ) 1 |
A 3 ; |
|
M 2 |
A( )M1 |
A M 3 ; |
|
v2 |
A( )v1; |
, |
(1.11) |
F2 |
A( )F1; |
|
|
d |
|
|
|
dt 3.
где A определяет угловое положение вектора |
3 |
в ба- |
|
|
зисе е2. Матрицы направляющих косинусов для кинематического узла 1-го рода из системы (1.11) уравнений при вращении вокруг трех осей обозначим соответственно:
|
1 |
0 |
0 |
|
cos |
0 |
sin |
|
A1 ( |
) 0 |
cos |
sin |
; A2 ( ) |
0 |
1 |
0 |
; |
|
0 |
sin |
cos |
|
sin |
0 |
cos |
|
|
cos |
sin |
0 |
|
|
|
|
|
A3 ( |
) |
sin |
cos |
0 . |
|
|
|
|
|
|
0 |
0 |
1 |
|
|
|
|
Модель узла (поступательной кинематической пары)
[28]
v2 |
v1 G( 3 ) 1 A v3 ; |
|
|
|
F2 |
F1 |
A F3 ; |
|
|
M 2 |
M1 |
G( 3 )F3 ; |
, |
(1.12) |
2 |
1; |
|
|
|
d 3 |
dt |
v3. |
|
|
где A определяет угловое положение вектора v3 в базисе е2; G (р3) — кососимметрическая матрица, введенная выше.
16
17
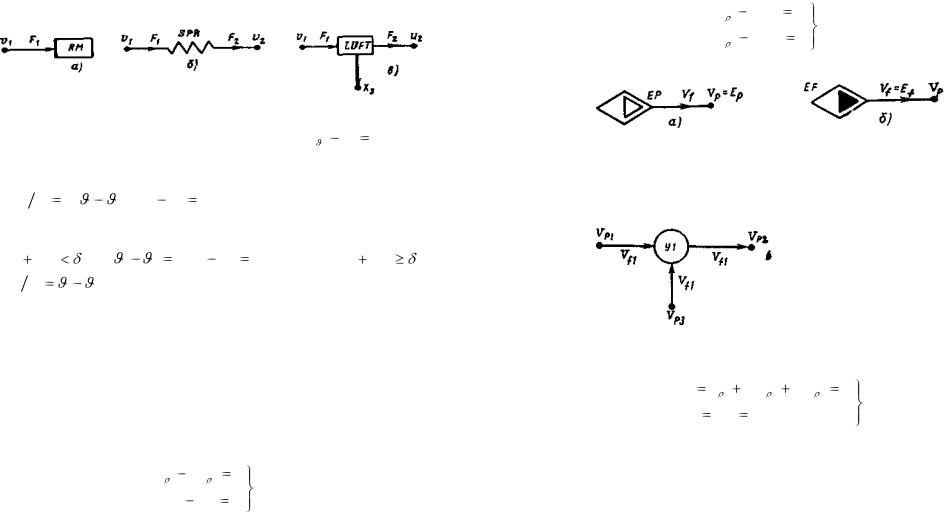
Динамические компоненты отображают свойства механических систем, накладывающие динамические ограничения на относительное движение твердых тел, т. е. пружины, демпферы, трение, люфты. На рис. 1.11 приведено графическое изображение динамических компонентов с элементарными связями:
|
|
|
|
|
|
|
Рис. |
|
|
|
|
|
вязкое трение RM (рис. 1.11, а) с моделью R |
F1 |
0 , где R |
||||||||||
|
|
|
|
|
|
|
|
|
|
1 |
|
|
— коэффициент трения; |
|
|
|
|
|
|
||||||
|
|
пружина |
SPR |
|
(рис. |
1.11, |
б) |
с |
моделью |
|||
dF1 |
dt k( |
1 |
2 ) , F1 |
F2 0 , где k — коэффициент упруго- |
||||||||
сти; |
|
|
|
|
|
|
|
|
|
|
|
|
|
люфт LUFT (рис. 1.11, б) с моделью F1 = F2 = 0 при |
|||||||||||
(x3 |
x0 ) |
, |
1 |
2 |
|
0, F1 |
F2 0 |
при |
(x3 |
x0 ) |
, |
|
dx |
dt |
1 |
2 |
, где |
x |
3 |
— |
переменная связи |
S3, |
со- |
||
3 |
|
|
|
|
|
|
|
|
|
|||
ответствующая перемещению в зазоре; х0 — начальное смещение от центра зазора;  — допустимое перемещение в зазоре.
— допустимое перемещение в зазоре.
Компоненты, имеющие только элементарные связи, также будем называть элементарными. При построении механических цепей широко используют такие элементарные компоненты, как трансформаторы, гираторы, сумматоры скоростей и др.
Трансформатор TR (рис 1.12) имеет модель
V |
|
TV |
0; |
(1.13) |
TV f |
|
V f |
0. , |
|
1 |
|
|
2 |
|
|
1 |
|
2 |
|
|
|
18 |
|
|
где Т - коэффициент трансформации.
Примером трансформатора может служить рычаг или редуктор.
Гиратор СУ (рис. 1.13) имеет модель
V |
GV f |
|
0; |
(1.14) |
V |
GV f |
|
0. , |
|
1 |
1 |
|
|
|
2 |
|
2 |
|
|
где G — коэффициент гирации.
Рис. 1.12 |
При- |
|
мером гиратора может служить гидроцилиндр, в котором давление Р (потенциальная переменная) преобразуется в силу F, действующую на поршень (потоковая переменная).
Рис. 1.13
Узел-сумматор скоростей Yl (рис. a1 V 1 a2V 2 a3V 3 Vf1 Vf 2 Vf 3 .
1.14) имеет модель
0;
(1.15)
Источникам энергии механических систем (двигателям различных типов) соответствуют автономные и управляемые источники. Среди автономных источников энергии будем выделять источники потенциальных ЕР (рис. 1.15, a) Vp = Ер (t)
19