

Методическое пособие 612
.pdfВыше были изложены принципы представления механических систем в виде механических цепей. Приведенные примеры иллюстрируют эти принципы, включая построения математических моделей.
39
ГЛАВА 2
ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СЛОЖНЫМИ (НЕОПРЕДЕЛЕННЫМИ)
ДИНАМИЧЕСКИМИ СИСТЕМАМИ НА ОСНОВЕ БИНАРНОГО ПОДХОДА
2.1. Требования к системам автоматического управления в современной ГПС
Переход к ГПС, массовому использованию в промышленности роботов и робототехнических комплексов ставят перед специалистами по управлению и организации производства ряд новых проблем, решение которых возможно лишь на основе автоматизации. Современные требования к системам автоматического управления отличаются большим разнообразием, возросла сложность решаемых задач управления, все более жесткие требования предъявляются к качественным характеристикам функционирования автоматических систем. Удовлетворение этих требований возможно лишь при дальнейшем расширении функциональных возможностей систем автоматического управления, наделении их свойствами универсальности и гибкости, способностью быстрой адаптации к изменению характеристик, условий работы и свойств объекта управления без непосредственного участия человека. Широкое использование таких систем автоматического управления облегчило бы также решение многих задач, в настоящее время еще достаточно трудоемких, связанных с проектированием, наладкой и эксплуатацией автоматических систем.
В настоящее время разработка и создание систем автоматического управления — сложный многоэтапный процесс, осуществление которого на каждом этапе требует привлече-
40
ния специалистов высокой квалификации. Процесс разработки начинается, как правило, с изучения объекта автоматизации, когда использование законов естественных наук позволяет построить математическую модель объекта, задаваемую некоторой совокупностью соотношений. Основная трудность и главное противоречие, с которыми приходится сталкиваться на этом этапе специалистам по управлению, заключаются в определении степени детальности описания объекта автоматизации. Причем готовых рецептов нет. Можно длительное время заниматься кропотливыми исследованиями и в результате получить математическую модель большой сложности, отражающую тонкие свойства объекта управления. Использование подобной модели существенно усложнит реализацию последующих этапов создания системы автоматического управления, тогда как вклад в конечный результат учтенных тонких особенностей поведения объекта может оказаться незначительным. Напротив, относительно простая математическая модель может быть построена быстро, и ее использование может дать хорошие результаты.
Таким образом, выбор модели является неформальным, творческим этапом, необходимо соотносить его с конечными целями и учитывать возможности технических средств, применяемых при реализации системы управления. В любом случае математическая модель лишь с некоторой степенью приближения отражает поведение объекта. Она определяется совокупностью уравнений и соотношений между переменными
— теми физическими величинами (или функциями от них), изменения которых во времени существенны для решения рассматриваемой задачи управления. Прочие величины либо вовсе не входят в математическое описание объекта управления, либо включаются в это описание в виде параметров уравнений и соотношений. Такие величины предопределяют не только характер и диапазоны изменения параметров модели во
41
времени, но и степень неопределенности (так как законы изменения этих величин неизвестны точно), с которой приходится иметь дело при использовании некоторой математической модели. Это означает, что фактически при построении управления всегда приходится иметь дело с неопределенными динамическими системами.
Второй этап разработки системы управления направлен на уменьшение отмеченной выше неопределенности; он заключается в идентификации параметров модели, в определении законов их изменения во времени, а если это невозможно, то в получении оценок диапазонов изменения параметров системы. Во многих важных случаях задача идентификации должна решаться не только на этапе проектирования, но и в процессе функционирования системы управления, эпизодически или непрерывно. Задача идентификации — сложная задача, от качества ее решения в значительной степени зависит качество функционирования системы автоматического управления в целом.
Следующий этап разработки системы управления — выбор алгоритма управления или выбор закона обратной связи, что, как правило, то же самое. Сначала по виду математической модели объекта управления и в зависимости от целей управления определяется общий вид закона управления, затем по результатам решения задачи идентификации рассчитываются параметры выбранного закона. В одних, сейчас уже редких случаях, решение задач, возникающих на этом этапе, может оказаться относительно простым; в других случаях для этого может потребоваться решение вспомогательных задач, проведение большого объема вычислений или даже дополнительных исследований. В некоторой степени совершенствованию этого процесса способствует использование систем автоматизированного проектирования. Естественно, что для нестационарного объекта управления необходимость в коррек-
42
тировке параметров закона управления может возникать постоянно, а выполняться такая корректировка должна в условиях нормальной эксплуатации и с привлечением квалифицированного персонала.
После того как решены все задачи рассмотренного этапа, проясняется общая структура системы автоматического управления, которую следует наполнить техническими средствами. Поскольку технические средства реализуют возлагаемые на них функции не точно, а привносят в систему ряд ограничений и помех, учет которых на предшествующих этапах не всегда возможен, возникает необходимость в проведении имитационного эксперимента. В этом эксперименте вся или значительная часть используемой аппаратуры та же, что и в реальной системе, а объект управления, некоторые измерительные и исполнительные устройства представлены имитационными моделями. Цель этого этапа — проверка соответствия спроектированной системы управления установленным требованиям и при необходимости внесение изменений в настройку параметров регулятора.
Заключительный этап разработки включает проведение опытной эксплуатации системы управления; на этом этапе осуществляется окончательная настройка системы управления под объект, причем необходимость в таких настройках может возникать постоянно в процессе эксплуатации. Реализация соответствующих операций возлагается на обслуживающий персонал.
Приведенный выше перечень проблем, с которыми приходится сталкиваться при создании систем автоматического управления, показывает, что для их разрешения необходимо привлечение на каждом этапе разработки и при эксплуатации большого числа специалистов высокой квалификации. В условиях массовой и комплексной автоматизации потребность в таких специалистах резко возрастает, что становится сущест-
43

венным препятствием на пути ускоренной автоматизации народного хозяйства. Одним из возможных путей в данной ситуации могло бы послужить создание таких методов теории автоматического управления, которые позволяли бы иметь дело с неопределенными объектами управления; учитывали бы реальные ограничения на переменные, параметры и управления, свойственные объекту и техническим средствам; исключали бы необходимость в точной идентификации параметров моделей объектов и обеспечивали бы эффективную работу системы управления при произвольном изменении параметров в широких диапазонах, что позволило бы значительно понизить требования к квалификации обслуживающего персонала. Разумеется, соответствующие алгоритмы управления могут оказаться весьма сложными, для их реализации могут потребоваться значительные вычислительные мощности. Достижения микроэлектроники и вычислительной техники последнего десятилетия создали техническую базу для практической реализации нового подхода к автоматизации.
Рис. 2.1.Структурное отображение трех принципов регулирования:
а— принцип компенсации; б — принцип обратной связи;
в— принцип комбинированного регулирования
Появление надежной, дешевой и эффективной микропроцессорной техники коренным образом изменило представления о приборостроении, технических средствах автоматики и устранило многие традиционные ограничения и проблемы, связанные со сложностью реализации и надежностью регуляторов.
Высказанные выше соображения и приведенные факты свидетельствуют о том, что теория и практика управления стоят, с одной стороны, перед новыми проблемами и задачами, с другой стороны, располагают и новыми возможностями по реализации эффективных алгоритмов автоматического управления, не стесненных, как прежде, требованием простоты реализации. Все это делает актуальным и необходимым поиск новых принципов, методов и приемов построения систем автоматического управления.
Теперь попытаемся изложить основные идеи и принципы теории бинарных систем автоматического управления, методов анализа и синтеза этого нового класса нелинейных систем. Развиваемый при этом подход может найти разнообразные применения. В автоматике его использование, вероятно, наиболее эффективно при решении задач управления существенно нестационарными процессами в условиях неопределенности [21]. Создание теории бинарных систем автоматического управления ориентировано на
44

Рис. 2.2. Компоненты структурных схем классических систем автоматического регулирования:
а — координатная связь; б — опера тор разрешение тех проблем современного этапа автоматизации, о которых говорилось выше. Использование методов этой теории позволяет уменьшить объем априорной информации об объекте управления, перейти от точного знания характеристик объекта к знанию диапазонов их изменения, предложить конечный набор алгоритмов управления, каждый из которых позволит эффективно управлять широким классом объектов, разработать простые рекуррентные правила построения автоматических систем управления. Отметим, что теория бинарных систем является естественным развитием теории систем автоматического регулирования и дополняет ее новым инструментом, расширяющим возможности автоматических систем. Опыт моделирования и применения таких систем управления показывает, что наиболее целесообразной базой для их реализации является дискретная вычислительная техника, в частности микропроцессорная.
2.2. Классический подход к структурному построению систем автоматического управления
Структурный метод является эффективным инструментом исследования сложных динамических систем. Представление систем в виде схем соединений некоторых блоков широко применяется для изображения изучаемых процессов и явлений в самых различных областях: в экономике и технике, в биологии и экологии, а также при решении различных задач управления, подготовки и принятия решений. Структурные представления позволяют не только наглядно выявить наличие и характер взаимосвязей между различными подпроцессами, протекающими в сложных системах, но и использовать при их анализе интуицию исследователя, привле-
кать содержательные соображения для внесения таких изменений в систему, которые меняют ее поведение в желаемом направлении. Эффективность структурной теории систем доказана при решении многих проблем, в том числе проблем теории автоматического управления объектами с сосредоточенными и с распределенными параметрами.
В классической теории автоматического регулирования рассматриваются структурные схемы, основанные на использовании понятия переменной или координаты, изображаемой обычно стрелкой (рис. 2.2, а), и понятия динамического звена, динамического элемента или оператора, определяющего преобразование входных переменных звена в его выходные переменные и изображаемого в виде некоторого блока (рис. 2.2, б). Каждая структурная схема системы автома-
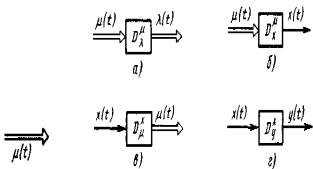
тического управления содержит некоторое число операторов и координатных связей между ними, наглядно отражающих взаимосвязи между переменными. Конкретный вид структурной схемы предопределяется многими обстоятельствами. Например, он зависит от того, что понимается под оператором: характеризует ли оператор некоторое элементарное звено или представляет собой некую обособленную часть системы, состоящую из элементарных звеньев. Примерами схем последнего типа являются обобщенные структурные схемы (рис. 2.4). Такие схемы детально изучены в классической теории автоматического регулирования и соответствуют использованию трех основных принципов регулирования: компенсации (рис. 2.4, а), обратной связи (рис. 2.4, б), комбинированного регулирования (рис. 2.4, в).
Рис. 2.3. Обозначение оператора с варьируемыми параметрами
45

Задающее воздействие ys (t) должно воспроизводиться регулируемой координатой у(t) ошибка регулирования — х(t) внешние возмущения, действующие на систему, — f (t) .
Основную проблему классической теории регулирования составляет надлежащий выбор, как правило, неизменного опера-гора D2, представляющего собой устройство управления или регулятор. Методы, позволяющие осуществить такой выбор, весьма разнообразны и зависят от многих причин, например, от информации, которую можно использовать в регуляторе для формирования управляющего воздействия на регулируемый объект. Обычно конструирование оператора D2 осуществляется из элементарных элементов (операторов), соединяемых тем или иным образом в схему и представляющих собой различные корректирующие звенья, фильтры и т. п. В результате получается некоторая структурная схема, состоящая из операторов и различных (прямых и обратных, положительных и отрицательных) координатных связей (рис. 2.3).
С определенной долей условности можно сказать, что классическая теория регулирования имеет дело с системами, структурно отображаемыми схемами, построенными на основе использования двух основных элементов или двух основных понятий: оператора и переменной (координаты).
Теория адаптивного управления расширила возможности автоматических систем, и в методологическом аспекте это расширение произошло за счет введения нового основного элемента — оператора с варьируемыми параметрами (рис. 2.3). Функция (t) определяет изменение параметров опера-
тора D.
47
Рис. 2.4 Три обобщенные схемы
адаптивных систем управления:
а — вариация параметров оператора, представляющего собой алгоритм координатного управления; б — изменение параметров оператора объекта управления; в — смешанная схема
Как показали многие исследования, введение такого элемента повышает разнообразие возможных управляющих структур систем регулирования, позволяет конструировать системы, способные эффективно управлять классом объектов, характеризуемым неопределенностью параметров объекта.
Приведем три обобщенные схемы адаптивных систем управления, наиболее полно изученных к настоящему времени и различающихся способами использования элемента, изображенного на рис. 2.4. В первой схеме (рис. 2.5, а) этот элемент используется для вариации параметров оператора D2 ,
представляющего собой алгоритм координатного управления. Вторая схема (рис. 2.5, б) указывает другой способ использования этого элемента, связанный с изменением параметров оператора D1 — объекта управления. Наконец, в системах
адаптивного управления (рис. 2.5, б) применяются обе отмеченные выше возможности.
Заметим, что приведенные на рисунке схемы — обобщенные. Если использовать элементарные динамические зве-
49

нья, то можно построить более «тонкую» структуру каждого блока на схемах рис. 2.5.
Проблема построения адаптивной системы управления сводится, таким образом, к выбору оператора координатного управления D2 и оператора D4 ( D4 ), определяющего алгоритм
адаптации. Один из часто используемых в этом случае подходов заключается в предварительном, выборе неизменного оператора D2 , обеспечивающего требуемое качество регули-
рования при некоторых фиксированных параметрах объекта, соответствующих наиболее характерному режиму его функционирования, и в синтезе оператора D4 , корректирующего
параметры оператора D2 в зависимости от соответствия ре-
альных характеристик замкнутой системы их требуемым значениям.
Известно большое число вариантов адаптивных систем управления. Отмеченное выше их методологическое единство позволило создать ряд сходных, но все же различных схем адаптации, закономерностям которых подчиняются почти все известные методы. Можно сказать, что адаптивным системам управления отвечают структурные схемы, построенные при использовании трех основных элементов: операторов, операторов с варьируемыми параметрами и координатных связей между ними.
2.3. Принцип бинарности
Сигнал - опе-
Рис. 2.5. Принимаемое |
Рис. 2.6. Дополнительный элемент |
обозначение сигнала- |
структурных схем систем автоматическо- |
оператора |
го регулирования |
Логический
а |
б |
Рис. 2.7. Изменение оператора преобразования:
а — с использованием операции умножения; б — на основе
Исходной посылкой в методологии построения структурных схем систем автоматического управления, позволяющей расширить возможности автоматических систем по управлению динамическими объектами в условиях неполной информации, является понятие сигнала-оператора или пере- менной-оператора. Для обозначения таких переменных в структурных схемах применяется двойная стрелка (рис. 2.6).
Переменная-оператор (сигнал-оператор) формально представляет какое-либо преобразование, осуществляемое над переменными координатами. Использование понятия сигналаоператора и обозначения для него (см. рис. 2.6) позволяют
50 |
51 |
ввести новый дополнительный к стандартным для теории управления элементам основной элемент (рис. 2.9). Этот элемент наглядно отображает преобразование координаты х (t) в координату у (t) внешним сигналом-оператором D (t).
Пере-
менная
Рис. 2.8. Обозна- |
Рис. 2.9. Основные виды преобразований в |
чение оператор- |
бинарных системах: |
ной переменной |
а — операторное; б — операторно-координатное; |
(или переменной- |
в — координатно-операторное; г — координат- |
оператора) |
ное |
|
Отметим, что D (t) может быть обычным сигналом, подвергаться различным преобразованиям и выступать в этом случае в качестве координаты. Это означает, например, что такие переменные могут быть включены в общую совокупность переменных состояния системы, причем каждый элемент такой совокупности может выступать в том или ином качестве.
Необходимость во введении нового элемента связана с тем, что во многих задачах возникает потребность в изменении алгоритмов преобразования информации. При физической реализации такого элемента можно использовать различные приемы. Например, изменение способа преобразования может осуществляться параметрическим путем, тогда этот элемент тождествен тому, который используется в адаптивных системах и изображен на рис. 224. Другой способ заклю-
52
чается в использовании операции умножения, тогда этот элемент можно представить в виде, приведенном на рис. 2.9, а.
Изменение оператора преобразования может происходить и логическим путем (рис. 2.9, б). Выбор некоторых фиксированных операторов D1, D2 ,..., DN определяется значением
сигнала-оператора D (t).
Отметим, что логический способ изменения операторов преобразований широко используется в системах автоматического управления с переменной структурой.
Поскольку практически изменение оператора преобразования осуществляется тем или иным сигналом или при выполнении тех или иных соотношений, характеризующихся значением некоторой переменной или сигнала, естественно введение соответствующего обозначения для таких переменных или сигналов. Чтобы отличить их от обычных переменных или координат (см. рис. 2.9, а), будем изображать
их, как и сигналы-операторы, двойными стрелками (рис. 2.9) и называть соответственно операторными переменными или переменными-операторами, а обозначать буквами греческого алфавита.
Нужно заметить, что введенное выше различие между переменными-координатами и переменными-операторами, конечно, условное. Для внешнего наблюдателя, незнакомого с указанным выше содержательным разделением переменных на переменные-координаты и переменные-операторы, они суть одно и то же: переменные рассматриваемой им нелинейной динамической системы. Предлагаемое толкование переменных может служить лишь некоторым методологическим приемом. Ввиду важности этих понятий подчеркнем, что никакого формального различия между переменнымикоординатами (см. рис. 2.10, а) и переменными-операторами (см. рис. 2.10) не делается. Переменную называют координатой, если над ней осуществляется то или иное преобра-
53

зование, и ту же самую переменную называют оператором, если ею определяется вид преобразования, выполняемого над какой-либо координатой. Такое двойственное толкование переменных состояния нелинейной динамической системы называем принципом бинарности. Динамические системы, построенные на основе использования принципа бинарности,
назовем бинарными динамическими системами. В таких сис-
темах переменные-координаты и переменные-операторы выступают в качестве равноправных переменных состояния системы, а введенное выше различие играет важную роль лишь на этапе структурного синтеза системы.
Теперь опишем исходный понятийный аппарат, необходимый для построения теории бинарных систем автоматического управления, дополняя его по мере надобности. Как всякая переменная, переменная-оператор может подвергаться преобразованиям с постоянными операторами, и если выходная величина такого преобразования далее выступает в качестве оператора, то такое преобразование называют операторным и изображают в структурных схемах так, как это показано на рис. 2.10, а.
Рис. 2.10. Варианты обратных связей при структурном син-
Если выходная величина в дальнейшем подвергается преобразованию, то такое преобразование называют опера- торно-координатным (рис. 2.10, б). Аналогичным образом определяются преобразования координатно-операторного типа (рис. 2.10, в) и координатного типа (рис. 2.10, г). По-
следнее преобразование обычное и совпадает с преобразованием, изображенным на рис. 2.10, б. Возможны и преобразования смешанного типа (рис. 2.10). Поскольку некоторые переменные могут участвовать в нескольких преобразованиях и в различном качестве, то имеет смысл ввести тождественные (прямое и обратное) преобразования переменных с обозначениями, указанными на рис. 2.10.
Использование введенных выше понятий, блоков и определений, сочетание их с различными принципами теории автоматического управления позволяет получить большое разнообразие структурных схем бинарных систем автоматического управления. Это расширяет возможности специалистов по теории управления в построении систем автоматического управления и расширении круга задач, решаемых автоматическими системами.
Рис. 2.11. Смешанные преоб- |
Рис. 2.12. Тождественные |
разования в бинарных сис- |
преобразования в бинар- |
темах |
ных системах |
Рассмотрим возможности применения принципа регулирования по отклонению и введенных выше понятий при структурном синтезе замкнутых механических систем. Введем следующие обозначения (рис. 2.11): Р, S, R — операторы, представляющие собой соответственно объект регулирования, задатчик и регулятор. Нижний индекс у таких операторов ука-
55
54

зывает их выходную переменную. Использование принципа регулирования по отклонению и различных типов таких операторов позволяет получить простейшие замкнутые динамические системы с координатной обратной связью (КОС) (рис. 2.10, а), с координатно-операторной обратной связью (КООС) (рис. 2.10, б), с операторной обратной связью (ООС) (рис. 2.10, в), с операторно-координатной обратной связью (ОКОС) (рис. 2.10, г) [20].
Подчеркнем, что введение обратных связей различных типов пока чисто формальный прием, основанный на принятом условном разделении переменных на координаты и операторы. Основное их назначение — расширение системы понятий, используемой при структурном синтезе систем. Целесообразность введения тех или иных понятий и определений может быть показана лишь при решении конкретных проблем. Покажем, каким образом данные выше определения могут быть использованы при структурном синтезе замкнутых динамических систем.
Рис. 2.13. Размещение регу- |
Рис. 2.14. Обобщенная |
лятора в структуре системы |
структура, иллюстрирую- |
автоматического управле- |
щая принцип разомкнутого |
2.4. Принципы регулирования и проблема управления в условиях неопределенности
Рассмотрим задачу управления, заключающуюся в формировании и приложении к объекту регулирования, представленному (рис. 2.4) оператором Py , таких управляющих
воздействий и (t), при которых выходные величины объекта (регулируемые координаты) у (t) воспроизводят некоторые
функции времени y s (t) , генерируемые задатчиком S y , а при устранении начальных рассогласований значение ошибки регулирования x(t)  y(t) изменяется в переходных про-
y(t) изменяется в переходных про-
цессах требуемым образом. Для определенности предположим, что объект управления описывается линейными обыкновенными дифференциальными уравнениями. Решение задачи должно быть обеспечено в условиях воздействия на объект регулирования различного рода возмущений: операторных (например, параметрических) a(t) и координатных f (t) .
Первые из них изображены двойной стрелкой, вторые — обычной. Смысл проводимого различия во внешних возмущениях и их обозначениях ясен из следующего представления оператора объекта Py :
y(t) Py (a(t), f (t);u(t)) Py (a(t))u(t) Py (a(t)) f (t) . (1)
Из соотношений (1) следует, что к координатным возмущениям относится не зависящая от управления u(t) адди-
тивная часть в уравнении объекта регулирования, а к операторным – те возмущения, которые не могут быть выделены таким образом и оказывают влияние лишь на вид операторов преобразований.
В некоторых случаях оказывается полезным выделение в операторе объекта не изменяемой его части, представленной оператором Rz на рис. 2.15. Обычно в качестве такой части выступает исполнительное устройство, тогда z(t) - его вы-
ходные координаты, которые можно считать известными функциями времени.
5656