

Методическое пособие 382
.pdfинтенсивности |
деформации |
сдвига |
, |
которая |
||
пропорциональна интенсивности деформаций i |
. Для гибки |
|||||
i . Таким образом, |
зона |
разрушений определяется |
||||
максимальным |
значением |
|
|
и схемой |
напряженного |
|
|
||||||
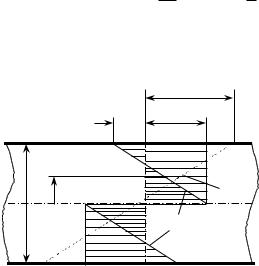
состояния. Если пренебречь зоной немонотонной деформации и считать н c 0.5 R r r 0.5s , то максимальные
деформации с точностью до знака будут равны на внутреннем и внешнем радиусах:
R |
|
R |
1 |
r s r 0.5s |
|
|
s |
|
|||||
|
c |
|
r 0.5s |
2r |
s |
||||||||
|
|
|
|
|
|||||||||
r |
|
r |
|
1 |
r r 0.5s |
|
|
s |
|
|
|||
c |
|
2r s |
|
|
|||||||||
|
|
r 0.5s |
|
|
|
|
|||||||
Поскольку на внешней поверхности напряженное |
|||||||||||||
состояние |
|
характеризуется |
двумя |
|
растягивающим |
||||||||
напряжениями |
z , и |
одним |
|
сжимающим , а на |
|||||||||
внутреннем |
|
слое |
все |
три |
напряжения |
сжимающие |
|||||||
(всестороннее неравномерное сжатие), то пластичность материала на внешнем слое меньше, следовательно, там и появится первая трещина.
Величина допустимой деформации наружного слоя приближенно соответствует величине максимальной деформации в шейке при испытании на растяжение. Линейная деформация растяжения связана с относительным сужением
следующей зависимостью:
. 1
Тогда:
71
max |
|
|
|
|
1 |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|||||
|
r |
|
|
1 |
|
||||||||
|
|
|
|
2 |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
s |
min |
|
|
|
|
|
||
После несложных преобразований получаем |
|||||||||||||
r |
|
1 2 |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
, |
|
|
|
|
|
||
|
|
2 |
|
|
|
|
|
||||||
s min |
|
|
|
|
|
|
|
||||||
где |
- |
относительное сужение в момент разрушения |
|||||||||||
при испытании на растяжение.
Из формулы видно, что чем пластичнее металл, т.е. чем больше относительное сужение, тем меньше может быть принят внутренний радиус в участке изгиба (радиус пуансона).
При 0 (хрупкий металл) изгиб невозможен, а при 0,5 теоретически можно осуществлять гибку на нулевой радиус.
Пружинение при гибке. Остаточные напряжения и деформации
При снятии внешних деформирующих усилий упругие деформации при разгрузке вызывают большие угловые деформации. Это явление называется пружинением. При разгрузке слои заготовки, находящиеся в зоне тангенциального растяжения, укорачиваются, а слои, находящиеся в процессе деформирования в зоне сжатия, удлиняются.
Для анализа пружинения воспользуемся теоремой о разгрузке. Согласно этой теореме связь между напряжением и деформациями при разгрузке подчиняется закону Гука. Если тело при нагружении испытывало неоднородную деформацию, то при разгрузке в нем возникнут остаточные напряжения. Величина остаточных напряжений равна разности между напряжениями, действующими в нагруженном теле и фиктивными напряжениями, которые возникли бы в теле при том же внешнем силовом воздействии, но при условии только упругого деформирования.
Рассмотрим пружинение при гибке моментом широкой полосы на относительно большой радиус. В этом случае
72
влиянием напряжений на процесс деформирования можно пренебречь. Будем считать модель материала идеальной жестко-пластической. В этом случае коэффициент Лоде в формуле для определения изгибающего момента можно принять равным 1. Условие равенства момента пластического изгиба без упрочнения и фиктивного момента упругих деформаций будет иметь вид:
M |
s s |
2b |
'W |
'bs2 |
|
|
|
|
|
|||
|
4 |
|
6 |
|
|
|
|
|
|
|||
|
|
|
|
|
, |
|
|
|
|
|
||
где |
b - |
ширина полосы, |
W - |
момент сопротивления |
||||||||
изгибу, |
' |
- фиктивные напряжения, действующие во |
||||||||||
внешних слоях при упругом нагружении. |
|
|
|
|||||||||
Тогда |
' 1.5 s , |
а |
распределение |
остаточных |
||||||||
напряжений по толщине материала: |
|
|
|
|
||||||||
ост s у s ' |
2 y |
|
3 |
y |
|
|
||||||
s |
s 1 |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
s |
|
|
|
Здесь |
y |
- фиктивное напряжение, |
действующее на |
|||||||||
расстоянии |
|
y от срединной поверхности. |
|
|
|
|||||||
|
|
|
|
|
|
|
|
' |
|
|
|
|
|
|
|
|
|
s/2 |
s |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
y |
|
|
|
|
y |
|
|
|
|
|
s |
|
|
|
|
|
ост |
|
|
|
|
|
Рис.15.
Разгрузка происходит в условиях упругого деформирования, следовательно, угол пружинения можно
73

определить по известной формуле сопротивления материалов для изгиба моментом:
MlEI
В нашем случае момент инерции поперечного сечения
относительно срединной поверхности I |
bs3 |
|
M |
s s |
2b |
12 , |
4 |
, длина |
|||
нейтрального слоя в поперечном сечении l c (здесь - угол, на который изогнуласть заготовка после пластической
деформации). E - модуль упругости 1-го рода. Тогда:
|
|
2 |
|
|
|
|
|
|
|
|
|
|
s s |
b |
|
|
|
s c |
|
||||
|
|
|
4 |
|
|
c |
3 |
|
|||
|
|
|
|
|
|
|
|
|
|||
|
bs3 |
|
|
|
E s |
||||||
|
|
|
|
|
|
||||||
|
|
E |
|
12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
74
Лекция 7. Энергетические методы решения задач при проектировании технологических процессов.
Инженерный метод в своей математической основе базировался на совместном решении уравнений равновесия и условий пластичности с использованием различных упрощающих допущений.
Целый ряд методов, относящихся к группе энергетических, основаны на законе сохранения энергии и экстремальных и вариационных теоремах теории пластичности. Это основное энергетическое уравнение, кинематическая теорема (теорема о верхней оценке), принцип минимума полной мощности.
Основное достоинство энергетических методов – возможность получения решения минуя интегрирование дифференциальных уравнений равновесия. Это очень важно, поскольку без применения упрощающих допущений технологические задачи обработки давлением приводят к необходимости решения нелинейных дифференциальных уравнений в частных производных.
Общий подход в энергетических методах – это использование кинематически возможного поля скоростей или перемещений материальных частиц для определения деформированного и напряженного состояний. Под кинематически возможным полем понимают такое поле скоростей (перемещений), которое удовлетворяет граничным условиям и условиям неразрывности.
Таким образом, предпосылкой к решению, для энергетических методов является предварительное задание в деформируемой заготовке некоторого поля скоростей или перемещений. Это поле задается на основании экспериментальных исследований деформированного
75
состояния заготовки, проведенного анализа течения металла, а также интуитивных соображений. Чем точнее кинематически возможное поле скоростей соответствует истинному, тем точнее получатся результаты решения.
К энергетическим методам относятся:
-метод баланса работ (мощностей);
-метод верхней оценки;
-прямой вариационный метод (метод Ритца);
-вариационно – разностный метод (метод конечных элементов).
Наиболее полно энергетические методы разработаны и апробированы при следующих исходных положениях:
1.Деформируемый материал однороден и изотропен. Модель материала – жестко-пластическая.
2.Справедливы физические уравнения
деформационной теории пластичности |
|
в |
виде, |
||||
|
|
|
3 |
|
i |
s |
|
ij |
|
|
ij |
||||
|
2 |
i |
|||||
предложенным А.А.Ильюшиным |
|
или |
|||||
теории течения в виде уравнений Сен-Венана – Леви
|
|
3 |
|
i |
s |
|
|
|
ij |
||||
ij |
2 |
i |
||||
– Мизеса |
|
|||||
3.В кинематически возможном поле перемещений (скоростей) допускается разрывы касательных к поверхностям разрыва компонент, если сохраняется непрерывность нормальных к поверхностям разрыва компонент полей.
4.Силы контактного трения не зависят от нормальных напряжений и определяются законом трения Прандля-Зибеля.
5.Температурные напряжения и деформации, а также силы инерции считают пренебрежимо малыми.
Метод баланса работ (мощностей).
Метод баланса работ применяли многие исследователи, в том числе, например С.Н.Петров (1914), Э.Зибель и
76
А.Ф.Головин (30-е годы XX-го века) и др. Изначально использовали простейшую запись основного энергетического уравнения в виде уравнения баланса работ
Ap A A
(здесь Ap - работа активных внешних сил, A - работа
сил сопротивления деформации, A - работа сил трения на контактных поверхностях), и достаточно простые поля перемещений.
В настоящее время большее распространение получили решения, основанные на разрывных полях скоростей и использовании основного энергетического уравнения в виде баланса мощностей. Иногда этот метод называют методом баланса мощностей, хотя принципиальных различий с методом баланса работ он не имеет.
Метод баланса мощностей основан на использовании основного энергетического уравнения.
Wp W W Wk
Здесь: Wp - мощность внешних сил, W - мощность пластической деформации, W - мощность трения на контакте
с инструментом, Wk - мощность сдвиговых деформаций на поверхностях разрыва поля скоростей.
Рассмотрим составляющие баланса мощностей последовательно.
Мощность внешних сил, в том случае, когда действует
сосредоточенная внешняя сила P , приложенная к инструменту (например, к пуансону), движущемуся с
постоянной скоростью v0 , определяется как:
Wp Pv0 qFП v0 ,
где q - удельная сила, FП - площадь пуансона.
77
Принимая гипотезу жестко пластического тела мощность пластических деформаций можно записать в следующем виде:
W ij ij dV s i dV
V V
Для действительного поля скоростей справедливо равенство:
ij ij σιεi
Действительно, воспользуемся уравнениями СенВенана – Леви – Мизеса:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
i |
|
s |
|
|
3 |
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ij |
|
|
|
|
ij |
cp |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
ij |
|
|
|
|
|
2 i |
|
|
|
|
|
|
|
2 |
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
3 |
|
В главных площадках: |
|
|
|
1 2 3 |
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
i |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
1 |
|
2 i |
|
|
1 |
|
cp |
|
|
|
|
i |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
i |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
3 |
; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
i |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
1 |
3 |
|
|
|
|
|
|
|
i |
|
|
|
|
|
|
1 2 |
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
; |
|
|||||||||||||||||
|
|
2 |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
; |
3 |
|
|
|
3 |
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
2 |
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
Дальнейшие преобразования: |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
ij ij |
|
1 1 2 2 3 3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
|
i |
|
|
2 |
|
|
2 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
2 |
3 |
|
2 |
|
2 |
3 |
1 |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||
|
|
i |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
2 |
|
2 |
|
2 i 2 |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||
1 |
|
i |
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 i |
|
|
|
|
|
|
1 |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
3 |
|
|
1 |
|
|
|
|
|
|
i |
|
|
i i |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
Согласно |
|
|
|
энергетическому |
|
|
условию |
пластичности |
|||||||||||||||||||||||||||||||||||||||||||
i |
|
s . |
|
Если тело |
|
считать |
|
идеально |
жестко-пластическим |
|||||||||||||||||||||||||||||||||||||||||||||||||||||
(без упрочнения), то s |
const . |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||
Мощность сил трения на контакте с инструментом:
78

W |
k v df |
|
|
|
f |
|
|
Здесь k - удельные контактные силы |
трения, |
||
определяемые по закону Прандля-Зибеля, v |
- |
величина |
|
скорости |
относительного скольжения на |
контактных |
|
поверхностях, f - площадь контакта с инстументом. Для жестко-пластического тела интеграл может быть преобразован к виду:
W k v df s s v df
f |
f |
В выражении для мощности сдвига по поверхностям fl разрыва скоростей обычно полагают, что величина касательного напряжения на поверхности разрыва равна
l |
k |
s |
||
|
|
|
||
|
3 . Тогда: |
|||
максимально возможному значению |
|
|
||
Wk l v l df k v l df
fl fl
Здесь - разрыв скоростей. Напомним, что разрыв могут претерпевать только касательные составляющие скоростей к любой поверхности.
Окончательно:
|
1 |
|
|
|
|
||
P |
s i dV s s v df k v l df |
||||||
v |
|
||||||
|
|
|
f |
fl |
|
||
|
|
0 |
V |
|
|||
Если заменить поле скоростей полем перемещений, то основное энергетическое уравнение примет вид, в котором баланс мощностей заменится на баланс работ:
P h s i dV s s u df k u l df
V f fl
79
Здесь h - малое приращение перемещения
деформирующего инструмента, |
i |
- интенсивность |
деформаций, u - относительное перемещение материальных частиц деформируемого тела вдоль контактных поверхностей
инструмента, u l - разрыв поля перемещений вдоль поверхностей разрыва.
Последовательность шагов при использовании метода баланса работ следующая:
1.Выделяют очаг пластической деформации.
2.Задаются кинематически возможным полем скоростей (перемещений) внутри очага пластических деформаций.
3.Вычисляют компоненты тензора скоростей деформаций (тензора деформаций) и определяют интенсивность деформаций, величины скоростей (перемещений) на контактных поверхностях и величины разрывов скоростей (перемещений) на поверхностях разрыва.
4.Составляют уравнение баланса мощностей (работ) и
определяют значение деформирующей силы. Отличительной особенность метода баланса работ
(мощностей) является то, что кинематически возможное поле скоростей (перемещений) фактически считают действительным и не пытаются улучшить решение путем варьирования поля.
Решение задачи осадки цилиндрического образца с помощью метода баланса работ.
В качестве примера рассмотрим уже решавшуюся нами задачу определения удельной деформирующей силы при осадке цилиндрического образца.
Допущения при решении задачи: материал – жесткопластический, контактное трение – постоянно по всей
80