

Моделирование роботов и РТС. учебное пособие. Медведев В.А
.pdfВ. А. Медведев
МОДЕЛИРОВАНИЕ РОБОТОВ И РТС
Учебное пособие
e3 |
|
|
e2 |
e4 |
z |
x |
y |
Воронеж 2020
МИНИСТЕРСТВО НАУКИ И ВЫСШЕГО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ
Федеральное государственное бюджетное образовательное учреждение высшего образования
«Воронежский государственный технический университет»
В. А. Медведев
МОДЕЛИРОВАНИЕ РОБОТОВ И РТС
Учебное пособие
Воронеж 2020
УДК 007.52:681.51:621.865.8(075.8) ББК 32.816я7
М42
Рецензенты:
кафедра информатики и вычислительной техники Международного института компьютерных технологий, г. Воронеж (зав. кафедрой канд. техн. наук, доцент А. В. Рыжков); коммерческий директор ООО «Интеграл СТ»,
канд. техн. наук С. А. Ткалич
Медведев, В. А.
Моделирование роботов и РТС: учебное пособие /
М42 В. А. Медведев; ФГБОУ ВО «Воронежский государственный технический университет». – Воронеж: Изд-во ВГТУ, 2020. – 82 с.
ISBN 978-5-7731-0839-9
В учебном пособии рассматриваются вопросы аналитического моделирования манипулятора, привода постоянного тока и гидропривода, робота с системой динамического управления, а также имитационного моделирования робототехнических систем.
Предназначено для студентов направления 13.03.02 «Электроэнергетика и электротехника» (профиль «Электропривод и автоматика робототехнических систем») очной формы обучения.
Ил. 12. Табл. 2. Библиогр.: 9 назв.
УДК 007.52:681.51:621.865.8(075.8) ББК 32.816я7
Печатается по решению редакционно-издательского совета Воронежского государственного технического университета
ISBN 978-5-7731-0839-9 © Медведев В. А., 2020
©ФГБОУ ВО «Воронежский государственный технический университет», 2020
2
ВВЕДЕНИЕ
Моделирование на персональных компьютерах позволяет определить основные характеристики роботов и показатели функционирования робототехнических систем на стадии их проектирования. Модель манипулятора может также непосредственно использоваться в структуре управляющей системы при динамическом управлении.
Дисциплина «Моделирование роботов и робототехнических систем» соответствует программе подготовки бакалавров по направлению 13.03.02 «Электроэнергетика и электротехника» (профиль «Электропривод и автоматика робототехнических систем»).
Многообразие кинематических схем манипуляторов, целей и задач моделирования породило множество различных типов моделей. В данном учебном пособии рассматриваются математические модели.
В первой главе приведены математические выражения, необходимые для построения динамической модели манипулятора на основе аппарата Ньютона-Эйлера. Рассматриваются вопросы построения с помощью аналитического моделирования динамических моделей различных исполнительных приводов, а также модели робота с системой динамического управления.
Во второй главе рассматриваются вопросы имитационного моделирования робототехнических систем с использованием общецелевой системы моделирования GPSS, основные блоки системы GPSS.
Третья глава посвящена вопросам моделирования исполнительных приводов и управляемого движения манипуляторов на персональных компьютерах. Приведены особенности моделирования движения роботов и робототехнических систем в реальном масштабе времени, применения параллельных процессоров при моделировании робота с адаптивной системой управления, а также моделирования манипулятора и РТС с помощью сети Петри.
3
1.ДИНАМИЧЕСКИЕ МОДЕЛИ МАНИПУЛЯТОРА
ИСИСТЕМЫ УПРАВЛЕНИЯ РОБОТА
Моделирование движения манипулятора основывается на математическом описании действующих в сочленениях сил и моментов в форме уравнений динамики. Эта глава посвящена построению динамических моделей манипуляторов, исполнительных приводов и системы управления манипулятором в матричной форме записи.
1.1. Динамическая модель манипулятора
При описании автоматического построения аналитической модели манипулятора будем предполагать, что его параметры (длины, массы, моменты инерции и т. д.) известны,
исчитать их постоянными величинами. Координаты сочленений (углы или линейные перемещения, соответствующие вращательным или поступательным степеням подвижности)
иих производные являются независимыми переменными. Все другие величины, используемые при построении математической модели, будем рассматривать как функции координат сочленений.
Приведем сначала основные понятия, необходимые для описания физической модели манипулятора. Дадим определения звена, кинематических и динамических переменных, координат сочленений.
Рассмотрим механизм, содержащий n звеньев. Звено манипулятора с номером i представляет собой твердое тело,
описываемое множествами кинематических параметров Ki и динамических параметров Di.
На основании метода Ньютона-Эйлера множества кинематических параметров Ki и динамических Di параметров определяются как [1]
~ |
~ |
, |
~ |
~ |
|
|
Ki (ei , |
ei 1 |
rii, |
ri,i 1), |
(1.1) |
||
Di (mi, J~i ), |
||||||
|
||||||
4
где |
~ |
|
|
|
|
|
ei – единичный вектор оси i-го сочленения; |
||||||
|
e~i 1 – единичный вектор i + 1-го сочленения; |
|||||
|
~ |
|
|
|
|
|
|
rii – вектор, проведенный от центра i-го сочленения к цен- |
|||||
тру масс i-го звена; |
|
|
|
|||
|
~ |
|
|
|
|
|
|
ri, i 1 – вектор, проведенный от центра i + 1-го сочленения |
|||||
к центру масс i-го звена; |
|
|
||||
|
mi |
– масса i-го звена; |
|
|||
|
~ |
(Ji1,Ji2,Ji3) – |
диагональная матрица размера 3 3, |
|||
|
Ji |
|||||
содержащая главные моменты инерции i-го звена. |
||||||
|
Векторы |
~ |
~ |
~ |
~ |
|
|
ei , |
ei 1, |
rii , |
ri,i 1 определены по отношению |
||
к системе координат, связанной с i-м звеном. Это декартова система координат Qi, связанная с центром масс и с осями, ориентированными вдоль главных осей инерции. Единичные векторы этих осей будем обозначать как qi1,qi2 иqi3 .
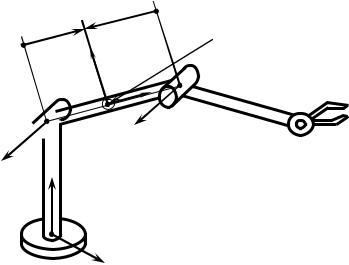
На рис. 1.1 представлен пример расположения векторов.
Для иллюстрации выбрано второе звено манипулятора с ха- |
||||||||
рактерными векторами |
~ |
, |
~ |
, |
~ |
, |
~ |
|
e2 |
e3 |
r22 |
r23 . |
|||||
~ |
~ |
|
|
|
|
|
|
Локальная система |
r23 |
|
|
|
|
|
|
||
r22 |
|
|
|
|
|
|
|
координат второго звена |
Qi (qi1,qi2,qi3)


 e~3
e~3
~
e2 z Центр масс
второго звена
x y
y
Рис. 1.1. Характерные векторы для второго звена
5

Относительное положение звеньев определяется координатами сочленений q1,..., qn (обобщенными координатами
манипулятора).
В случае поступательного сочленения обобщенная коор-
дината qi представляет собой линейное перемещение i-го звена относительно (i – 1)-го звена. В случае вращательного сочле-
нения обобщенная координата qi определяется углом между |
||||||||||||||||||||||||||||||
проекциями векторов |
~ |
|
|
|
~ |
|
на плоскость, |
|
перпендику- |
|||||||||||||||||||||
ri 1, i и |
rii |
|
||||||||||||||||||||||||||||
лярную оси |
~ |
i-го сочленения, как показано на рис. 1.2. |
||||||||||||||||||||||||||||
ei |
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
~ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ei |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
qi3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
qi2 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
~ |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
Oi-1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Oi |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ri i |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
~ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
ri 1, i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
qi1 |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
qi |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 1.2. Определение обобщенной координаты qi для вращательного сочленения
Положительное направление перемещения для поступательных сочленений или поворота для вращательных сочленений определяется направлением осей сочленений.
При построении динамической модели манипулятора в первую очередь определяется его базовая конфигурация, когда все обобщенные координаты равны нулю (нулевая конфигурация). Базовую конфигурацию целесообразно выбирать
6
таким образом, чтобы орты локальных систем координат были параллельны осям абсолютной (неподвижной) системы. При
этом проекции ортов qi1,qi2 иqi3 |
на соответствующие оси x, |
|||
y, z равны единице. |
|
|
|
|
Динамическая модель |
манипуляционного |
механизма |
||
робота может быть представлена в виде |
(1.2) |
|||
P A(q, d)q q |
B(q, d)q C(q, d), |
|||
|
т |
|
|
|
где P – вектор-столбец размера n обобщенных сил; A(q,d) – матрица размера n n инерции системы;
q [q1,..., qn]т – вектор-столбец размера n обобщенных
координат;
d – вектор, содержащий геометрические и динамические параметры механизма (длины звеньев, массы, моменты инерции и т. д);
q [q1,..., qn ]т – вектор-столбец размера n ускорений обобщенных координат;
q |
т |
[q1 |
,..., qn ] – вектор-строка размера n скоростей |
|
|
|
обобщенных координат;
B(q,d) – матрица размера n n n, учитывающая взаимовлияние звеньев;
q [q1,..., qn ]т – вектор-столбец размера n скоростей обоб-
щенных координат;
C(q,d) – вектор-столбец размера n сил тяжести.
Второе слагаемое в уравнении (1.2) представляется в виде
|
|
|
т |
B |
1 |
|
|
|
|
|
|
|
|
q |
|
|
(q,d)q |
|
|
|
|
|
т |
|
................. |
|
|
|
||||
q |
B(q, d)q |
|
|
|
|
|
, |
(1.3) |
||
|
|
|
|
|
|
|
||||
|
|
|
................. |
|
|
|
||||
|
|
|
|
|
|
|||||
|
|
|
|
тBn (q,d)q |
|
|
||||
|
|
|
q |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
где B1(q,d) ... Bn (q,d) – матрицы размера n n.
7
Матрицы динамической модели, полученной по методу Ньютона-Эйлера, зависят только от обобщенных координат и параметров сочленений. Это важное свойство для получения эффективного алгоритма формирования аналитических моделей манипуляторов.
Необходимо отметить, что многие методы моделирования роботов не позволяют построить модель в виде (1.2). В некоторых случаях модель получается в виде
P A(q, d)q h(q, q,d), |
(1.4) |
|
|
|
|
где h(q, q,d) – вектор-столбец усилий размера n, в который
производные от обобщенных координат входят неявно.
Ряд методов обеспечивает только решение обратной задачи динамики, т.е. дает модель в виде
P P(q, q,q,d). |
(1.5) |
|
|
В уравнение (1.5) все переменные входят неявно. |
|
|||
Матрицы динамической модели явным образом зависят |
||||
от кинематических переменных |
~ ~ |
~ |
~ |
и дина- |
Ki (ei , ei 1 |
, rii, ri,i 1) |
|||
мических параметров Di (mi , |
J~i ). Кроме |
того, |
векторы |
|
совокупности Ki зависят от текущей конфигурации манипулятора, т.е. от обобщенных координат q1, ... , qn . Для определения элементов матриц динамической модели манипулятора требуется вычислить все эти векторы в абсолютной системе координат Oxyz.
Такая кинематическая задача решается различными способами. Приведем ее решение с использованием формулы конечных поворотов векторов.
Предположим, что исполнительный механизм манипулятора находится в начальном положении, при котором углы поворота в сочленениях равны нулю. Пусть единичные векторы
систем координат известны; обозначим их как qij0 (j = 1, 2, 3;
i = 1, ..., n). Выполним поворот всех звеньев механизма вокруг оси e1 на угол q1 (рис. 1.3).
8
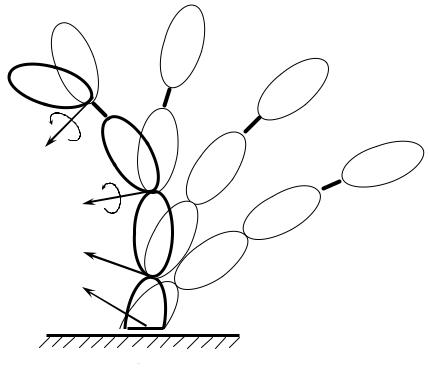
en qn
e3
q3
e2 q2 e1q1
e1q1
Рис. 1.3. Последовательные повороты
Затем выполним поворот всех звеньев, кроме первого, на угол q2 вокруг оси e2. Эта процедура повторяется вплоть до (i – 1)-го сочленения. В достигнутом пространственном положении вектор обобщенных координат равен q = ( q1, ..., qi-1, 0, ..., 0). Выполним теперь поворот части механизма, включающей звенья i, i + 1, ... , n, на угол qi вокруг оси ei.
В соответствии с формулой конечных поворотов после поворота на угол qi единичные векторы системы координат, связанной с i-м звеном, определяются из выражений
q |
ij |
q(1) |
cosq |
q(2) |
sinq q(3) |
, |
|
|
j 1, 2,3, |
|||
|
ij |
|
i |
ij |
i |
ij |
|
|
|
|
) e , (1.6) |
|
q |
(1) |
e (q/ |
e ), |
q(2) |
e q/ |
, |
q(3) |
(e q/ |
||||
|
ij |
i |
ij |
|
i |
ij |
i |
ij |
|
ij |
i ij |
i |
|
|
|
|
|
|
|
9 |
|
|
|
|
|