

Методическое пособие 131
.pdfВ замкнутых САР имеется сложное взаимодействие блоков: выход одного блока может служить входом другого блока и т.д. Использование понятия передаточной функции звеньев позволяет без особого труда находить связь между любыми координатами всей системы на основании знания передаточных функций соответствующих звеньев, составляющих эту систему. Не представляет трудности при этом и составление общего графического изображения ее в виде структурной системы.
Рассмотрим также в общем виде очень важное понятие коэффициента передачи (коэффициента усиления) К в установившемся режиме для звена с произвольной передаточной функцией W(р).
Если на вход звена подать постоянный входной сигнал
Хвх.у, то выходной сигнал Хвых.(t) при t → ∞ , будет стремиться к некоторому установившемуся значению
. (11)
Тогда по определению
(12)
Или, считая, что в установившемся режиме все производные становятся равными нулю, получим выражение для передаточной функции (13)
(13)
Следовательно, при р = 0 передаточная функция вырождается в обычный коэффициент усиления элемента или системы.
11
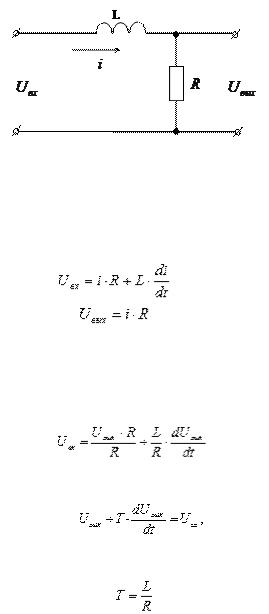
Представим математическое описание и передаточную функцию для R-L цепи, представленной на рис.4
Рис. 4. Схема R-L цепи
Для R-L цепи можно представить следующее дифференциальное уравнение
(14)
(15)
Решив уравнение (15) относительно тока i и подставив в уравнение (14), получим
(16)
или
(17)
где
12

является постоянная времени RL-цепи. Представим уравнение (16) в операторном виде
(18)
или
19)
Отсюда передаточная функция данного звена будет иметь вид
(20)
Графически это звено изобразится как показано на
рис. 5.
Рис.5. Графическое изображение звена
1.3. СТРУКТУРНЫЕ СХЕМЫ НЕПРЕРЫВНЫХ САУ
Часто САУ можно рассматривать как комбинацию динамических звеньев с определёнными типовыми или нетиповыми передаточными функциями. Изображение системы регулирования в виде совокупности динамических звеньев с указанием связей между ними носит название структурной схемы. Элементы структурных схем приведены в табл. 1.
13
|
Элементы структурных схем |
Таблица 1 |
|||||||||||||||||
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Наименование |
Обозначение |
|
|
|
|
|
|
|
|
Уравнение |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Звено |
|
x1 |
|
|
|
|
|
|
|
|
|
|
|
|
x2 |
x2 =W x1 |
|||
|
|
|
|
|
|
W |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Узел (разветвле- |
х |
|
|
|
|
|
|
|
|
|
|
|
|
|
х |
|
|||
ние линии связи) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
х |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Сумматор |
|
|
|
x1 |
|
|
|
|
|
x3 |
x3 = x1 + x2 |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
x2 |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Элемент |
сравне- |
|
|
x1 |
|
|
|
|
|
|
|
|
x3 = x1 − x2 |
||||||
ния (для отрица- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x3 |
|
|||
тельных |
обрат- |
|
|
|
|
|
|
|
|
|
x2 |
|
|||||||
ных связей) |
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Структурная схема может быть составлена на основе известных уравнений системы, и наоборот, уравнения системы могут быть получены из структурной схемы. Однако первая задача может иметь различные варианты решения (различные структурные схемы для одной и той же математической модели САУ), тогда как вторая задача имеет всегда единственное решение.
Различные способы преобразования структурных схем облегчают определение передаточных функций сложных систем автоматического управления и дают возможность привести многоконтурную систему к эквивалентной ей одноконтурной.
Пример структурной схемы линейной непрерывной системы представлен ниже.
14

Рис.5. Пример структурной схемы линейной непрерывной системы
На приведенной схеме стрелками с буквами показаны входные и выходные сигналы, относительно которых можно получить передаточные функции исходной системы. Примеры блоков для передаточных функций, которые можно получить для системы, представленной на рис. 6.
x 
 Wxy
Wxy 
 y
y
f 
 Wfy
Wfy 
 y
y
x 
 Wxε
Wxε  ε
ε
x 
 Wxε
Wxε  ε
ε
f |
Wf ε |
ε |
|
|
|
Рис. 6. Примеры блоков для передаточных функций
15

Указанные передаточные функции системы позволяют установить математические зависимости между соответствующими входными и выходными сигналами.
При преобразовании структурных схем используются следующие правила.
1) Объединение последовательно соединенных звеньев представлено на рис. 7
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
W1 |
|
|
W2 |
|
|
|
|
|
Wi |
|
|
Wn |
n |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
Wэкв |
|
|
|
y |
|
|
Wэкв = ∏Wi |
||||||||
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i=1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Рис.7. Объединение последовательно соединенных звеньев
2) Объединение параллельно соединённых звеньев представлено на рис. 8.
|
|
|
|
|
|
|
W1 |
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
x |
|
y |
||||||||||
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
||||||||||||
Wi |
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
Wэкв |
||||||
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Wn |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Wэкв = ∑n Wi
i=1
Рис.8. Объединение параллельно соединённых звеньев
3) Замыкание звена обратной связью представлено на рис. 9.
16

|
W1 |
x |
y |
|
W2 |
W |
= |
|
|
W! |
= |
|
W1 |
|
1 |
±W W |
|
||||||
ЭКВ |
|
|
1±W |
РАЗ |
||||
|
|
|
|
1 2 |
|
|
|
|
«+» - при отрицательной обратной связи «–» - при положительной обратной связи
Рис. 9. Замыкание звена обратной связью
4) Приведение обратной связи к единичной представлено на рис. 10.
|
|
|
x |
|
|
|
|
|
|
|
y |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
W1 |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
W2 |
|
|
|
|
|
|
|
|
|
y |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
1/W2 |
|
|
|
|
|
|
|
W1 |
|
|
|
W2 |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W |
= |
|
W! |
|
*W2 |
= |
|
1 |
* |
|
W1W2 |
|
1−W W |
|
W |
1−W W |
|
||||||||
ЭКВ |
|
2 |
W |
|
|
2 |
||||||
|
|
1 |
2 |
|
2 |
|
1 |
|||||
Рис. 10. Приведение обратной связи к единичной
17
5) Перенос точки съёма через линейное звено против хода сигнала представлен на рис. 11.
|
x |
|
|
|
|
|
y |
|
|
|
|
x |
|
|
|
|
|
|
y |
|||||||||||||||
|
|
W |
|
|
|
|
W |
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Рис. 11. Перенос точки съёма через линейное |
|
звено |
|
против хо- |
||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
да сигнала |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
6) |
|
|
|
Перенос точки съёма через линейное звено по |
|||||||||||||||||||||||||||||
ходу сигнала представлен на рис. 12. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
y |
|||
x |
|
|
|
|
|
|
W |
y |
|
|
|
|
y |
|
|
|
W |
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
1/W |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
Рис. 12. Перенос точки съёма через линейное звено по ходу сигнала
7) Перенос сумматора через линейное звено против хода сигнала представлен на рис. 13.
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
y |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
xW |
||||||
|
x |
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
||||
|
W |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
x1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1/W |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x1 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
y = x·W + x1 |
|
y= (x+x1·1/W)·W = xW + x1 |
||||||||||||||||||
Рис. 13.Перенос точки съёма через линейное звено по ходу сигнала
18

8) Перенос сумматора через линейное звено по ходу сигнала: представлен на рис. 14.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y=x*W+x1*W= |
|||
x |
|
|
|
|
|
y1 |
|
|
x |
|
|
W(x+x1) |
|||||
|
|
|
|
W |
|
|
W |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x1 |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
W |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
Рис. 14. Перенос сумматора через линейное звена по ходу сигнала
Пример №1 преобразования структурных схем. Структурная схема представлена на рис. 15.
х |
ε |
f |
y |
|
W1 |
|
W3 |
|
|
|
|
|
W2 |
|
W4 |
|
|
W5 |
|
Рис. 15. Структурная схема для преобразования
Требуется определить следующие передаточные функции линейной системы:
1) Wху - ? |
|
x |
|
|
|
|
|
|
|
y |
|
|
|
|
Wxy |
|
|||||||
|
|
|
|
||||||||
2) Wfy - ? |
f |
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|||||
|
|
|
Wfy |
|
|
|
|||||
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
3)Wxε - ? x 
 Wxε
Wxε  ε
ε
4)Wfε - ? f 
 Wf ε
Wf ε 
 ε
ε
19

Заданная система линейна, значит, для неё справедлив принцип суперпозиции, что позволяет при выполнении преобразований не учитывать входные и выходные сигналы, не задействованные при определении конкретных передаточных функций.
Так при определении передаточной функции Wху отбрасывается возмущающее воздействие f и не учитывается ε и по выше рассмотренным правилам выполняются следующие упрощения (преобразования) структурной схемы и вводятся новые обозначения:
W6 = W1 + W2 – объединение параллельно соединенных звеньев W1 и W2 ,
W7 |
= |
|
W3 |
– эквивалентная передаточная функ- |
1 |
+W3 * W4 |
ция звена W3, охваченного отрицательной обратной связью содержащей звено W4.
W8 = W6·W7 – объединение последовательно соединенных звеньев W6 и W7 (рис. 16).
x |
y |
W6 |
W7 |
W5
Рис. 16. Объединение последовательно соединенных звеньев
W6 и W7
Тогда имеем
Wxy = |
|
W8 |
|
. |
1 |
+W W |
|||
|
|
8 |
5 |
|
После подстановки обозначений передаточных функций элементов исходной системы получим:
20