

Моделирование систем управления. методические указания к выполнению лабораторной работы. Петрухнова Г.В., Подвальный С.Л
.pdfМИНИСТЕРСТВО НАУКИ И ВЫСШЕГО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ
Федеральное государственное бюджетное образовательное учреждение высшего образования
«Воронежский государственный технический университет»
Кафедра автоматизированных и вычислительных систем
МОДЕЛИРОВАНИЕ СИСТЕМ УПРАВЛЕНИЯ
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
к выполнению лабораторной работы для студентов направления
09.03.01 «Информатика и вычислительная техника» (профиль
«Вычислительные машины, комплексы, системы и сети») очной и заочной форм обучения
x |
ε |
W1 W4 
 W4
W4
Воронеж 2020
1
УДК 681.3 (07)
ББК 32.81я7
Составители:
канд. техн. наук Г. В. Петрухнова д-р техн. наук, проф С. Л. Подвальный
Моделирование систем управления: методические указания к выполнению лабораторной работы для студентов направления 09.03.01 «Информатика и вычислительная техника» (профиль «Вычислительные машины, комплексы, системы и сети») / ФГБОУ ВО «Воронежский государственный технический университет»; сост.: Г. В. Петрухнова, С. Л. Подвальный. - Воронеж: Изд-во ВГТУ, 2020. - 37 с.
Методические указания содержат теоретические и практические сведения для выполнения лабораторной работы по дисциплине «Теория информационно-управляющих вычислительных систем».
Предназначены для студентов четвертого курса очной формы обучения и студентов четвертого курса очной и заочной форм обучения.
Методические указания представлены в электронном виде и содержатся в файле Методичка ТИУВС1.pdf.
Табл. 2. Ил. 30. Библиогр.: 4 назв.
.УДК 681.3 (07)
ББК 32.81я7
Рецензент – П. Ю. Гусев, канд. техн. наук, доц. каф. компьютерных интеллектуальных технологий проектирования ВГТУ
Издается по решению редакционно-издательского совета Воронежского государственного технического университета
2
ВВЕДЕНИЕ
Методические указания содержат теоретические и практические сведения об основах моделирования автоматизированных систем управления (АСУ).
1. ЛАБОРАТОРНАЯ РАБОТА № 1. МОДЕЛИРОВАНИЕ СИСТЕМЫ АВТОМАТИЧЕ-
СКОГО УПРАВЛЕНИЯ 1.1. ОБЩИЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ
Объект управления (ОУ) — система, в которой про-
исходит подлежащий управлению процесс. Взаимодействие с ОУ происходит через входы (которые являются причинами появления процессов в ОУ) и выходы (которые являются про- цессами-следствиями).
Управление — процесс на входе объекта управления, обеспечивающий такое протекание процессов на выходе объекта управления, которое обеспечивает достижение заданной цели управления.
Регулирование — частный случай управления, цель которого заключается в поддержании на заданном уровне одного или нескольких выходов объекта управления.
Система автоматического регулирования (САР) –
совокупность объекта управления и автоматического регулятора, взаимодействующих между собой в соответствии с алгоритмом управления.
Регулирующий орган (РО) — это совокупность уст-
ройств, с помощью которых осуществляется управление входами объекта управления. Например, нагревательные элементы в системе управления температурой, клапаны с электроприводом в системе регулирования расхода жидкости и подобное.
Управляемая величина (выходная величина – У) —
показатель технологического процесса, которым необходимо управлять.
3
Управляющее воздействие (входная величина – Х) –
физическая величина, посредством которой управляется показатель технологического процесса.
Задающее воздействие — определяет требуемый закон регулирования выходной величины.
Возмущающее воздействие f(t) — процесс на входе объекта управления, являющийся помехой управлению.
Воспринимающие органы (ВО или так называемые чувствительные элементы ЧЭ) – измеряют и преобразуют контролируемую или управляемую величину объекта управления в сигнал, удобный для передачи и дальнейшей обработки. К ним относятся датчики влажности, температуры (термопары, термосопротивления, термопреобразователи), освещенности и т.д.
Усилительные органы (УО или усилительные эле-
менты УЭ) – это устройства, не изменяющие физическую природу сигнала, а производящие только усиление, т.е. увеличение сигнала до требуемого значения. Сюда относятся магнитные пускатели, твердотельные и электромагнитные реле и т.д.
Преобразующие органы (ПО или элементы ПЭ) -
преобразуют сигнал одной физической природы в сигналы другой физической природы для удобства дальнейшей передачи и обработки. Например, преобразователи неэлектрических величин в электрические.
Корректирующие органы (КО или элементы КЭ) -
служат для коррекции САУ с целью улучшения их работы.
Исполнительный орган (ИО или элемент ИЭ) - вы-
рабатывает и подает на регулирующий орган объекта управления управляющее воздействие.
Перечисленные выше термины поясняет рис. 1, на котором изображена система автоматического управления (САУ), объектом управления которой является водонагреватель.
4
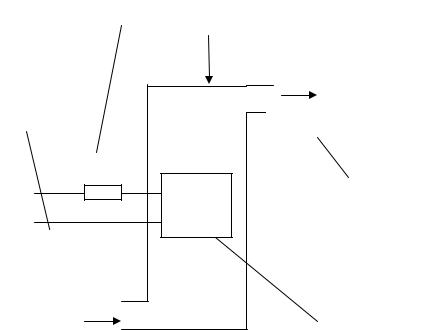
Задающий орган (ог-
раничивающее сопротивление)
Tокр
Управляющее
воздействие Х (напряжение питания)
R
Р
U
Вода
Возмущающее воздействие
(температура окружающего воздуха)
Нагретая вода
tводы
Управляемая
величина У (температура воды)
Регулирующий
орган (нагревательный элемент)
Рис. 1. Водонагреватель как объект управления (Р - мощность нагревательного элемента)
Чаще всего объекты управления изображают графически в виде функциональных блоков (рис. 2).
5

|
|
|
|
|
|
|
|
|
|
tводы |
|
|||
|
|
|
|
|
|
|
tводы |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
tвод |
|
|
R |
|
|
U |
|
P |
|
|
|
|
||||
|
|
|
|
ЗО |
|
|
PОУ |
|
|
ОУ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U – управляющее воздействие (напряжение питания), Р – мощность нагревательного элемента,
tокр – возмущающее воздействие (температура окружающего воздуха),
tводы – управляемая величина (температура воды),
РОУ – регулирующий орган (нагревательный элемент), ОУ – объект управления водонагреватель), ЗО – задающий орган (ограничивающее сопротивление).
Рис. 2. Водонагреватель в виде функциональных блоков
1.2. ПРЕДСТАВЛЕНИЕ САУ ДИФФЕРЕНЦИАЛЬНЫМ УРАВНЕНИЕМ И ПЕРЕДАТОЧНОЙ ФУНКЦИЕЙ
САУ может быть смоделирована (представлена) дифференциальным уравнением. При составлении дифференциального уравнения объекта необходимо, прежде всего, выявить физический закон (или совокупность законов), определяющий его поведение. Таким законом может быть, например, закон сохранения энергии, закон равновесия электродвижущих сил и другие основные законы физики. Математическое выражение соответствующего физического закона и является исходным дифференциальным уравнением управляемого объекта.
Очень важной категорией в теории автоматического управления и регулирования является понятие передаточной функции. Передаточная функция является своего рода матема-
6
тической моделью САУ, т.к. полностью характеризует динамические свойства системы.
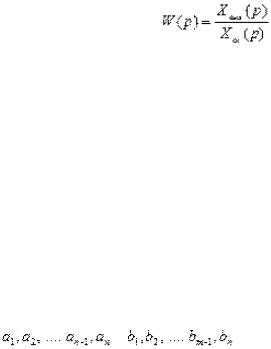
Под передаточной функцией элемента или системы понимают отношение операторного (лапласового) изображения соответствующей выходной величины к операторному изображению входной величины.
При этом также считают, что элемент или система находились при нулевых начальных условиях, т.е. элемент или система находились в установившемся состоянии, т.е. в состоянии покоя.
Следовательно, передаточная функция определяется в виде отношения (1):
(1)
Предположим, что линейная САУ описывается дифференциальным уравнением n-го порядка с постоянными коэффициентами и это уравнение имеет следующий вид:
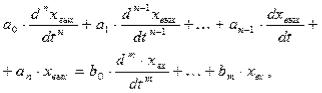 (2)
(2)
где  – выходная величина звена (системы);
– выходная величина звена (системы);
 – входная величина звена (в отклонениях от состояния равновесия);
– входная величина звена (в отклонениях от состояния равновесия);
|
|
, |
– |
постоянные |
|
коэффициенты, определяющие параметры звена. |
|
|
|||
При |
записи |
дифференциального |
уравнения |
члены, |
|
содержащие |
выходную величину |
и её |
производные, |
||
|
|
7 |
|
|
|
записывают в левой части уравнения, а все остальные члены – в правой.
Запись уравнения в форме (2) неудобна, особенно когда возникает необходимость исследовать взаимодействие отдельных звеньев системы при их соединении в различные цепи. Кроме того, решения уравнений с порядком выше третьего значительно усложняется и требует применения вычислительной техники. Поэтому для упрощения решения уравнения (2) используют средства описания динамических свойств системы через преобразование Лапласа. Основанием для этого служит то обстоятельство, что такое преобразование существенно облегчает исследование сложных систем, поскольку дифференциальные уравнения заменяются алгебраическими.
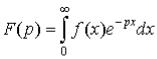
Преобразование Лапласа – это интегральное преобразование, связывающее функцию F(p) комплексного переменного (изображение) с функцией f(x) действительного переменного (оригинал).
Преобразованием Лапласа от функции f(x) (оргигинала) называется функция:
f(x) называют оригиналом преобразования |
(3) |
||
Лапласа, |
|||
а F(p) – |
изображением |
преобразования |
Лапла- |
са. f(x) и F(p) однозначно определяются друг относительно друга, то есть если известен оригинал f(x), то всегда можно узнать F(p), и наоборот, если известно F(p), то всегда можно получить f(x).
Преобразование Лапласа для типовых математических операций, а также для функций, часто встречающихся в задачах автоматического регулирования можно найти в учебниках.
Пользуясь преобразованием Лапласа, представим дифференциальное уравнение (4) в операторном виде:
8
(4)
или
(5)
где
(5)
есть оператор дифференцирования.
Для системы, описываемой операторным уравнением (6), передаточная функция будет иметь следующий вид:
(6)
Следовательно, передаточная функция  равна отношению двух полиномов:
равна отношению двух полиномов:
(7)
(8)
Как видно из уравнения (6), передаточная функция является дробно-рациональной функцией от независимого переменного p. Числитель передаточной функции является левой частью уравнения элемента или системы, а знаменатель - правой частью.
Уравнение
9
(9)
называется характеристическим уравнением звена или характеристическим полиномом звена.
В системах автоматического управления степень полинома знаменателя в выражении (6) всегда выше или равна степени полинома числителя, т.е.
 .
.
Из приведенных соотношений также видно, что пере-
даточную функцию легко получить из дифференциального уравнения простой формальной заменой производных опе-
ратором р в соответствующей, а изображение выходной величины определяется передаточной функцией и изображением входной величины:
(10)
Запись соотношений между выходом и входом звена в виде последнего уравнения (10) имеет большое практическое значение и дает значительное преимущество при исследовании САР, т.к. оно позволяет графически изобразить звено следующим образом
Рис. 3. Графическое изображение звена
10