

6. Лабораторная работа №6 изучение работы промышленного робота рф-202м
6.1 Общие сведения
Промышленный робот РФ-202М предназначен для осуществления операции загрузки технологического оборудования (штампа) заготовки и удаление штампованных деталей из рабочей зоны оборудования. Робот может обслуживать прессы, металлорежущие станки и машины другого назначения.
Робот содержит основание со стойкой, две руки с захватами, узел подготовки воздуха, устройство програмного управления (рис. 6.1). Предусмотрены следующие движения механизмов робота: зажим, освобождение заготовок и штампованных деталей захватами, движение захватов по оси рук в рабочую зону и из рабочей зоны, подъём рук вверх и опускание вниз , поворот рук по часовой и против часовой стрелки.
Устройство управления может работать в двух режимах: в режиме обучения и автоматическом режиме. В модуле памяти устройства управление может храниться до девяти программ с общим объёмом до 256 управляющих слов. 6.2 Цель работы является изучение режимов работы промышленного робота РФ-202М, усвоение принципов составления программ работы манипулятора и их реализация.
6.3. Условия и последовательность проведение работы
Работа производится группой студентов в количестве 3-4 человек. Каждый студент получает задание на реализацию варианта программы работы манипулятора робота.
Ознакомиться с работой робота по натурному образцу, составить его кинематическую схему и указать назначение входящих в него устройств.
Рис. 6.1 Схема промышленного робота:
1 – основание; 2 – стойка; 3 – руки; 4 – захваты;
5 – устройство программного управления
Подготовка устройства управления роботом к работе:
-органы управления привести в исходное положение. Исходному положению кнопок соответствует их отжатое состояние. Исходному положению програмного переключателя “номер программы’’ соответствует нуливое положение;
-включить систему управления нажатием кнопки “ВКЛ”;
-в узле коммутации нажать две кнопки, которые обеспечивают работу манипулятора в данном варианте компоновки. Нажатие одной из них соответствует варианту компоновки с зависимым положением захватного устройства. Нажатие другой иммитирует срабатывание датчиков положения модуля поворота правого исполнительного устройства. Управление поворотом манипулятора осуществляется органами управления левого захватного устройства;
-нажать кнопку “Контр. бат.”. Проверить наличие питания “ЗУ” по загоранию лампочки.
Порядок действия оператора в режиме обучения:
-нажать кнопку “Вкл. индикации”;
-![]() при
нажатой кнопке “стирание” нажать и
отпустить кнопку записи ;
при
нажатой кнопке “стирание” нажать и
отпустить кнопку записи ;
-установить переключатель “Номер программы” в положение 1;
- нажать
кнопку обучения ;
нажать
кнопку обучения ;
-вывести манипулятор в исходную точку;
- записать координаты исходной точки, для чего при нажатой кнопке начала программы нажать и отпустить кнопку ;
-записать при необходимости время выдержки манипулятора в точке, нажимая кнопку “Таймер”. Масштаб “Таймера” задаётся оператором в автоматическом режиме;
- записать координаты промежуточных точек, выводя манипулятор в эти точки и нажимая кнопку ;
-
 вывести
манипулятор в конечную точку, которая
должна соответствовать начальной.
Записать её, нажав и отпустив кнопку
при нажатой кнопке конца программы.
вывести
манипулятор в конечную точку, которая
должна соответствовать начальной.
Записать её, нажав и отпустив кнопку
при нажатой кнопке конца программы.
6.4.Пример составления программы и её реализация
Примем, что манипулятору необходимо перенести деталь из точки “а” в точку “в” (рис. 6.2). Используем для этой опереции левое захватное устройство манипулатора. В исходном положении левое захватное устройство открыто и находится в точке “в”. Последовательность перемещений захвата и руки манипулятора показана на рис. 6.2, а вариант программы (назовём его вариантом 1) , записываемой в запоминающее устройство системы управления, представлен в табл. 6.1.
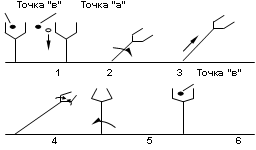
Рис. 6.2
После сопоставления схемы перемещений и табличной записи программы осуществляется её реализация в следующем порядке:
-подготовить устройство к работе в режиме обучения;
-записать программу в устройство памяти (напр. вариант 1)
-составить программу (вариант 2) переноса деталей с выдержкой руки в течение 3,5 с. в точке 2;
-записать программу в устройство памяти;
- проверить работу программы в режиме обучения;
- перейти к работе робота в автоматическом режиме;
- установить переключатель “Номер программы” в необходимое положение;
- установить масштаб таймера кнопкой
;
установить масштаб таймера кнопкой
;
- нажать кнопку автоматической работы
;
нажать кнопку автоматической работы
;
- нажать кнопку “Пуск”;
- при необходимости прервать программу нажать кнопку “Стоп” ;
- составить программу (вариант 3) синхронного переноса деталей двумя захватными устройствами в соответствии с программой (вариант 1);
- записать программу в модуль памяти в режиме обучения;
- составить программу (вариант 4) ,которая отличается от программы варианта3 введением временной задержки в точке 2 длительностью 9 с;
-
 осуществить работу робота по программам
3 и 4 в автоматическом режиме в соответствии
с пп. ; ; ”Пуск”; ”Стоп”.
осуществить работу робота по программам
3 и 4 в автоматическом режиме в соответствии
с пп. ; ; ”Пуск”; ”Стоп”.
Возможны и другие варианты начала и окончания программы и иная последовательность движения, временной задержки в друрих точках захватов и рук роботов.
Каждый студент разрабатывает и реализует свой вариант программы по указанию преподавателя.
В конце работы даются выводы и заключения.
Таблица 6.1
Варианты программы работы робота
Номер перемещения промеж. точки |
Символика перемещения |
Комментарий |
1 |
О |
Перемещение исполнительного устройства назад |
2 |
|
Поворот по часовой стрелке |
3 |
Х |
Выдвижение исполнительного устройства вперёд |
4 |
|
Захватное устройство |
5 |
|
Поворот против часовой стрелки |
6 |
|
Захватное устройство открыто |
Литература: [4].
УКАЗАНИЯ ПО ТЕХНИКЕ БЕЗОПАСНОСТИ
Запрещается находиться в зоне действия рук робота.
КОНТРОЛЬНЫЕ ВОПРОСЫ
Основные механизмы и элементы, входящие в состав робота.
Какие движения осуществляют механизмы робота, и какими символами эти движения осуществляются?
Какие действия оператора необходимы для подготовки робота к работе?
Назначение режима “Обучение”.
Перечислить последовательность дейсвия оператора в режиме “Обучение”.
Порядок реализации программы работы робота.