

10. Лабораторная работа № 10
ИССЛЕДОВАНИЕ ПАРАМЕТРОВ ДВИЖЕНИЯ РУКИ РОБОТА
10.1. Назначение, устройство, принцип действия, параметры
Циклическое движение руки робота при выполнении операций загрузки-разгрузки или других транспортных операций обеспечивается от двигателя посредством муфты включения. Подобная структурная схема используется и в конструкциях приводов выдвижных столов, устройств смены штампов, транспортеров периодического действия и других средств механизации кузнечно-штамповочного производства.
Двигатель 1 приводит в движение руку робота 2 посредством фрикционной муфты 3 (рис. 10.1). Момент, развиваемый двигателем, зависит от угловой скорости его ротора и изменяется в соответствии с заданной механической характеристикой: МД = а – b1 .
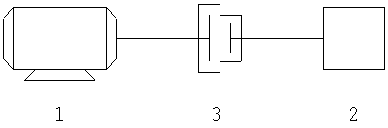
Рис. 10.1. Схема машинного агрегата с фрикционной муфтой.
К валу рабочей машины приложен постоянный момент сопротивления МС . Моменты инерции ведущего и ведомого валов равны соответственно J1 и J2 . В момент включения фрикционной муфты ведущий вал имеет угловую скорость 10 , ведомый вал неподвижен.
Между ведущей и ведомой частями муфты с момента включения до полного сцепления действуют силы тревния, имеющие момент МТР . Силы трения в муфте замедляют движение ведущего вала и ускоряют движение ведомого валв до тех пор, пока скорости этих валов не сравняются. После этого ведущий и ведомый вал будут двигаться как одно целое.
Решая дифференциальные уравнения движения ведущего и ведомого валов, выявить зависимость их скоростей 1 и 2 от времени. На одном графике построить функции 1(t) и 2(t) по нему установить tC - время полного сцепления и опредеоить общую скорость валов в момент полного сцепления. Выявить также закон изменения скорости всей системы 12 после полного сцепления муфты и определить скорость установившегося движения системы. Указанный выше график дополнить построением функции 12(t).
Таблица 10.1
Данные для вариантов
Вариант |
a, Нм |
b, Нмс |
10 , с-1 |
МТ , Нм |
МС , Нм |
J1, кгм2 |
J2, кгм2 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
1 |
100 |
1 |
130 |
20 |
17 |
0,5 |
0,7 |
2 |
130 |
1 |
140 |
25 |
20 |
1,2 |
1,5 |
3 |
180 |
2 |
90 |
29 |
28 |
1,5 |
2 |
4 |
200 |
0,8 |
250 |
25 |
20 |
1 |
1 |
5 |
400 |
1,5 |
280 |
26 |
23 |
1,4 |
1,7 |
6 |
600 |
4 |
150 |
55 |
50 |
0,5 |
1 |
7 |
800 |
10 |
80 |
80 |
75 |
1,2 |
1,5 |
8 |
1000 |
15 |
75 |
70 |
63 |
1 |
3 |
9 |
1500 |
20 |
70 |
180 |
160 |
1 |
5 |
10 |
1700 |
20 |
100 |
200 |
180 |
1,3 |
2,1 |
11 |
1800 |
20 |
90 |
180 |
150 |
1,4 |
1,9 |
12 |
300 |
2 |
160 |
20 |
16 |
1 |
2 |
13 |
2100 |
20 |
110 |
220 |
200 |
1,7 |
30 |
14 |
2000 |
20 |
100 |
200 |
183 |
3 |
4 |
15 |
2600 |
17 |
170 |
190 |
170 |
0,9 |
1,5 |
16 |
3000 |
30 |
90 |
200 |
180 |
1,5 |
2 |
17 |
350 |
3 |
120 |
25 |
20 |
1,7 |
3,5 |
18 |
50 |
1 |
45 |
25 |
20 |
0,3 |
0,5 |
10.2. Указания к выполнению работы.
Дифференциальное уравнение движения ведомого звена:
J
![]() = MТР
– MС
= MТР
– MС
Начальные условия при t = 0 : = 0, следовательно, c = 0, тогда:
=
![]() .
.
Дифференциальное уравнение движения ведущего звена:
J = а – b1 – MС
имеет решение
J
[ -
![]() ln|
1
+
ln|
1
+
![]() | ] = t
+ c
| ] = t
+ c
при t = 0 1 = 10
с = J [ - ln| 10 + | ]
При выполнении работы целесообразно использовать программу Delphi.
КОНТРОЛЬНЫЕ ВОПРОСЫ
Перечислите физические величины, характеризующие движение руки робота, их размерности.
Какие данные необходимы для определения приведенного момента инерции?
Как определить направление сил трения?
В каких случаях целесообразно использовать приведенные значения движущих сил, сил сопротивления, сил инерции?