

Задание 2. Кинематический анализ многозвенного механизма
Схемы
плоского многозвенного механизма
представлены на рис. 2.1 – 2.4, необходимые
для расчета данные в табл. 4. Угловая
скорость
![]() кривошипа
кривошипа
![]() постоянна и равна 2
постоянна и равна 2
![]() .
Определить для заданного положения
механизма:
.
Определить для заданного положения
механизма:
скорости точек , , , ... механизма и угловые скорости всех его звеньев при помощи плана скоростей;
скорости этих же точек механизма и угловые скорости звеньев при помощи мгновенных центров скоростей;
ускорения точек , и угловое ускорение звена
 ;
;положение мгновенного центра ускорений звена ;
ускорение точки , делящей звено пополам.
Необходимые для расчета данные приведены в таблице 4.
Дуговые стрелки на рисунках показывают, как при построении чертежа механизма должны откладываться соответствующие углы: по ходу или против хода часовой стрелки. Построение чертежа начинать со стержня, направление которого определяется углом .
Указания. Это задача на исследование плоскопараллельного движения твердого тела. При ее решении для определения скоростей точек механизма и угловых скоростей его звеньев следует воспользоваться теоремой о проекциях скоростей двух точек тела и понятием о мгновенном центре скоростей, применяя эту теорему (или это понятие) к каждому звену механизма в отдельности.
При
определении ускорений точек механизма
исходить из векторного равенства
![]() ,
где
– точка,
,
где
– точка,

Рис. 2.1

Рис. 2.2
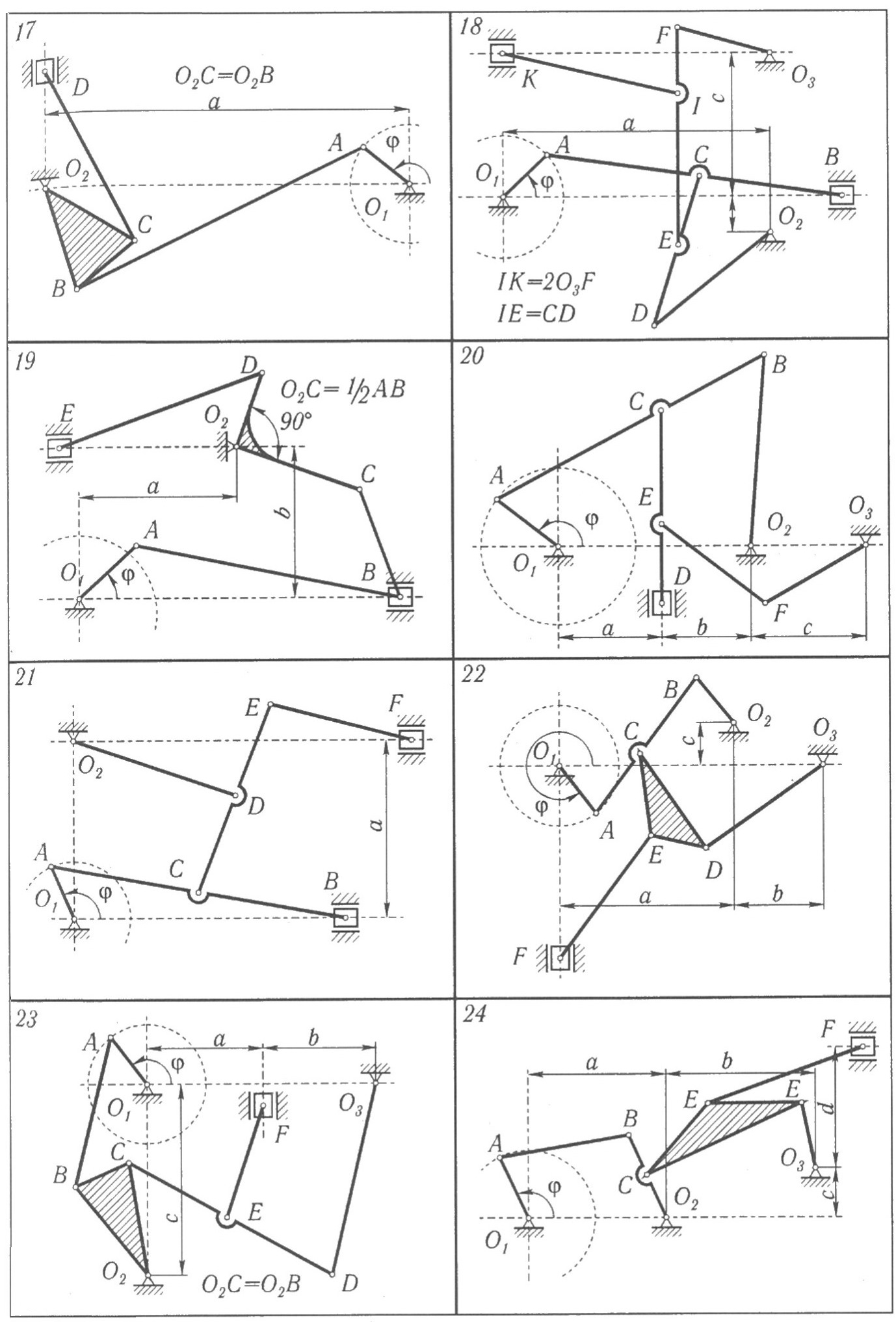
Рис. 2.3

Рис. 2.4
№ |
, град |
Расстояния, см |
|
||||||
a |
b |
c |
d |
e |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
200 |
18 |
23 |
18 |
22 |
23 |
14 |
28 |
– |
|
|
60 |
56 |
10 |
26 |
16 |
25 |
21 |
25 |
– |
|
|
90 |
15 |
25 |
54 |
35 |
– |
15 |
28 |
– |
|
|
155 |
26 |
15 |
23 |
– |
– |
15 |
65 |
– |
|
|
125 |
19 |
19 |
10 |
22 |
– |
12 |
– |
19 |
|
|
60 |
65 |
49 |
– |
– |
– |
15 |
29 |
– |
|
|
250 |
11 |
42 |
11 |
7 |
24 |
16 |
34 |
– |
|
|
90 |
27 |
18 |
14 |
15 |
30 |
14 |
29 |
– |
|
|
200 |
23 |
19 |
20 |
28 |
21 |
21 |
31 |
– |
|
|
20 |
55 |
21 |
25 |
– |
– |
15 |
– |
24 |
|
|
50 |
50 |
30 |
– |
– |
– |
14 |
29 |
– |
|
|
55 |
10 |
86 |
32 |
28 |
– |
21 |
– |
– |
|
|
315 |
17 |
54 |
– |
– |
– |
15 |
– |
40 |
|
|
0 |
28 |
40 |
6 |
18 |
15 |
15 |
31 |
– |
|
|
220 |
46 |
31 |
– |
– |
– |
15 |
20 |
– |
|
|
40 |
36 |
22 |
15 |
– |
– |
15 |
20 |
40 |
|
|
145 |
96 |
– |
– |
– |
– |
15 |
28 |
– |
|
|
45 |
70 |
9 |
37 |
– |
– |
16 |
– |
39 |
|
|
40 |
42 |
39 |
– |
– |
– |
20 |
– |
20 |
|
|
145 |
27 |
24 |
30 |
– |
– |
20 |
50 |
– |
|
|
115 |
46 |
– |
– |
– |
– |
15 |
– |
45 |
|
|
305 |
46 |
23 |
11 |
– |
– |
15 |
15 |
– |
|
|
130 |
31 |
30 |
50 |
– |
– |
15 |
30 |
– |
|
|
115 |
36 |
39 |
13 |
31 |
– |
17 |
23 |
– |
|
|
325 |
72 |
36 |
– |
– |
– |
15 |
– |
30 |
Таблица 4. Расчетные данные к заданию 2
Длины звеньев, см |
||||||||
1 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
28 |
– |
21 |
21 |
48 |
38 |
– |
42 |
|
|
– |
20 |
54 |
52 |
69 |
35 |
– |
32 |
|
|
58 |
– |
42 |
21 |
47 |
26 |
– |
31 |
|
|
– |
– |
51 |
22 |
38 |
– |
– |
– |
|
|
– |
– |
55 |
19 |
23 |
– |
38 |
22 |
|
|
24 |
– |
50 |
25 |
32 |
23 |
– |
39 |
|
|
– |
41 |
25 |
25 |
42 |
21 |
– |
49 |
|
|
23 |
– |
55 |
32 |
15 |
– |
45 |
– |
|
|
25 |
– |
65 |
62 |
31 |
– |
11 |
29 |
|
|
– |
– |
70 |
35 |
33 |
– |
17 |
12 |
|
|
– |
– |
45 |
54 |
34 |
– |
37 |
– |
|
|
55 |
– |
60 |
30 |
19 |
60 |
– |
49 |
|
|
– |
– |
50 |
35 |
40 |
22 |
22 |
50 |
|
|
15 |
– |
50 |
25 |
70 |
35 |
– |
50 |
|
|
20 |
– |
45 |
15 |
31 |
17 |
17 |
37 |
|
|
– |
– |
45 |
20 |
24 |
– |
40 |
– |
|
|
– |
– |
84 |
20 |
51 |
– |
– |
– |
|
|
– |
25 |
78 |
38 |
41 |
19 |
– |
57 |
|
|
– |
– |
71 |
30 |
– |
– |
57 |
– |
|
|
– |
30 |
80 |
32 |
58 |
29 |
– |
35 |
|
|
– |
– |
78 |
39 |
26 |
52 |
– |
38 |
|
|
38 |
– |
44 |
25 |
30 |
22 |
15 |
40 |
|
|
50 |
– |
40 |
16 |
60 |
30 |
– |
30 |
|
|
17 |
– |
35 |
11 |
45 |
25 |
25 |
44 |
|
|
– |
– |
76 |
46 |
50 |
35 |
– |
51 |
|
|
|
|
|
|
|
|
|
|
|
|
|
215 |
36 |
53 |
36 |
32 |
– |
19 |
40 |
– |
|
|
140 |
71 |
27 |
32 |
40 |
– |
16 |
30 |
– |
|
|
215 |
30 |
20 |
35 |
– |
– |
19 |
– |
19 |
|
|
180 |
35 |
15 |
38 |
7 |
– |
10 |
16 |
– |
|
|
25 |
46 |
28 |
17 |
– |
– |
16 |
25 |
– |
у скорение
скорение
![]() которой или задано, или непосредственно
определяется по условиям задачи (если
точка
движется по дуге окружности, то
которой или задано, или непосредственно
определяется по условиям задачи (если
точка
движется по дуге окружности, то
![]() );
– точка, ускорение
);
– точка, ускорение
![]() которой нужно определить.
которой нужно определить.
Пример 2.
Вид многозвенного механизма представлен на рис. 2.5.
Д
Рис. 2.5![]() ,
,
![]() см,
см,
![]() см,
см,
![]() см,
см,
![]() см,
см,
![]() см,
см,
![]() см,
см,
![]() см,
см,
![]() см,
см,
![]() см,
см,
![]() см,
см,
![]() см,
см,
![]() см,
см,
![]() см,
см,
![]() см,
см,
![]() см.
см.
Определить:
скорости точек
,
,
,
,
,
,
![]() ,
,
![]() механизма и угловые скорости всех его
звеньев при помощи плана скоростей и
мгновенных центров скоростей; ускорения
точек
,
и угловое ускорение звена
;
положение мгновенного центра ускорений
звена
;
ускорение точки
,
делящей звено
пополам.
механизма и угловые скорости всех его
звеньев при помощи плана скоростей и
мгновенных центров скоростей; ускорения
точек
,
и угловое ускорение звена
;
положение мгновенного центра ускорений
звена
;
ускорение точки
,
делящей звено
пополам.
Таблица 4 (продолжение)
1 |
|
|
|
|
|
|
|
|
|
|
– |
19 |
76 |
38 |
68 |
35 |
– |
29 |
|
|
50 |
– |
46 |
33 |
40 |
20 |
– |
50 |
|
|
– |
– |
59 |
29 |
24 |
– |
48 |
36 |
|
|
15 |
– |
50 |
33 |
16 |
– |
45 |
33 |
|
|
75 |
– |
50 |
11 |
33 |
– |
26 |
44 |
Решение:
Определение скоростей точек и угловых скоростей звеньев механизма при помощи плана скоростей.
а)
Определение скоростей точек. Строим
схему механизма в соответствии с
условиями задачи в выбранном масштабе
длин (рис. 2.6). Так как точка
![]() стержня
стержня
![]() закреплена, данное звено может совершать
только вращение вокруг неподвижной
оси, проходящей через точку
перпендикулярно плоскости рисунка.
Вектор
закреплена, данное звено может совершать
только вращение вокруг неподвижной
оси, проходящей через точку
перпендикулярно плоскости рисунка.
Вектор
![]() перпендикулярен к
и направлен в сторону вращения кривошипа.
Вычисляем модуль скорости пальца
кривошипа
:
перпендикулярен к
и направлен в сторону вращения кривошипа.
Вычисляем модуль скорости пальца
кривошипа
:
![]()
![]()
![]() . (2.1)
. (2.1)
Строим
план скоростей. Из произвольно выбранного
полюса
проводим отрезок
![]() ,
перпендикулярный
,
изображающий в выбранном масштабе
скорость точки
.
,
перпендикулярный
,
изображающий в выбранном масштабе
скорость точки
.
Для
определения скорости точки
,
учтем, что в точке
механизма находится ползун. Следовательно,
вектор скорости
![]() должен быть направлен вдоль направляющей
ползуна. Проводим через полюс
луч
должен быть направлен вдоль направляющей
ползуна. Проводим через полюс
луч
![]() ,
параллельный направляющей ползуна.
Чтобы найти численное значение
,
параллельный направляющей ползуна.
Чтобы найти численное значение

Рис. 2.6
скорости
![]() ,
используем теорему:
,
используем теорему:
![]() , (2.2)
, (2.2)
где
![]() – скорость точки
относительно точки
.
– скорость точки
относительно точки
.
Вектор
скорости
известен, вектор скорости
должен лежать на луче
,
вектор
,
как вектор скорости вращательного
движения точки
вокруг точки
,
должен быть перпендикулярен к радиусу
вращения
![]() .
Проводим из конца вектора
,
изображающего скорость
,
перпендикуляр к
.
Продлив его до пересечения с лучом
,
получим, согласно правилу сложения
векторов, скорость
(она равна перпендикуляру
.
Проводим из конца вектора
,
изображающего скорость
,
перпендикуляр к
.
Продлив его до пересечения с лучом
,
получим, согласно правилу сложения
векторов, скорость
(она равна перпендикуляру
![]() )
и скорость
(она совпадает с отрезком, отсеченным
перпендикуляром
,
на луче
).
Измеряем длину отрезка
и, пользуясь масштабом скоростей, находим
)
и скорость
(она совпадает с отрезком, отсеченным
перпендикуляром
,
на луче
).
Измеряем длину отрезка
и, пользуясь масштабом скоростей, находим
![]() . (2.3)
. (2.3)
Для определения скорости точки делим отрезок плана скоростей в отношении
![]() . (2.4)
. (2.4)
Луч
![]() изображает направление скорости точки
С. Применяем для ее нахождения тот же
способ, что и для точки
.
Используем векторное равенство:
изображает направление скорости точки
С. Применяем для ее нахождения тот же
способ, что и для точки
.
Используем векторное равенство:
![]() , (2.5)
, (2.5)
где
![]() – скорость точки
относительно точки
.
– скорость точки
относительно точки
.
Вектор
скорости
известен, вектор скорости
![]() должен лежать на луче
должен лежать на луче
![]() ,
вектор
,
как вектор скорости вращательного
движения точки
вокруг точки
,
должен быть перпендикулярен к радиусу
вращения
,
вектор
,
как вектор скорости вращательного
движения точки
вокруг точки
,
должен быть перпендикулярен к радиусу
вращения
![]() .
Проводим из конца вектора
,
изображающего скорость
,
перпендикуляр к
.
Проводим из конца вектора
,
изображающего скорость
,
перпендикуляр к
![]() .
Продлив его до пересечения с лучом
,
получим, согласно правилу сложения
векторов, скорость
(она равна перпендикуляру
.
Продлив его до пересечения с лучом
,
получим, согласно правилу сложения
векторов, скорость
(она равна перпендикуляру
![]() )
и скорость
(она совпадает с отрезком, отсеченным
перпендикуляром
,
на луче
).
Измеряем длину отрезка
и, пользуясь масштабом скоростей, находим
)
и скорость
(она совпадает с отрезком, отсеченным
перпендикуляром
,
на луче
).
Измеряем длину отрезка
и, пользуясь масштабом скоростей, находим
![]() . (2.6)
. (2.6)
Найдем
скорости точек
,
и
.
Точки
![]() и
и
![]() механизма закреплены, следовательно,
звенья
механизма закреплены, следовательно,
звенья
![]() и
и
![]() могут совершать только вращение вокруг
неподвижных осей, проходящей через
точки
и
соответственно. Значит вектор
могут совершать только вращение вокруг
неподвижных осей, проходящей через
точки
и
соответственно. Значит вектор
![]() и
и
![]() перпендикулярны к звеньям
и
.
Учитывая, что данные звенья параллельны,
стоим перпендикулярно к ним луч
перпендикулярны к звеньям
и
.
Учитывая, что данные звенья параллельны,
стоим перпендикулярно к ним луч
![]() по которому будут направлены указанные
вектора скоростей. Поскольку проекции
скоростей двух точек на прямую, проходящую
через эти точки, должны быть равны,
получаем, что
по которому будут направлены указанные
вектора скоростей. Поскольку проекции
скоростей двух точек на прямую, проходящую
через эти точки, должны быть равны,
получаем, что
![]() .
Следовательно, звено
движется поступательно и скорости всех
его точек совпадают, т.е.
.
Следовательно, звено
движется поступательно и скорости всех
его точек совпадают, т.е.
![]() .
Определяем скорость точки
так же, как и скорости точек
и
.
Составляем векторное равенство:
.
Определяем скорость точки
так же, как и скорости точек
и
.
Составляем векторное равенство:
![]() , (2.7)
, (2.7)
где
![]() – скорость точки
относительно точки
.
– скорость точки
относительно точки
.
Используя
аналогичные рассуждения, проводим из
конца вектора
,
изображающего скорость
,
перпендикуляр к
![]() .
Продлив его до пересечения с лучом
.
Продлив его до пересечения с лучом
![]() ,
получим, согласно правилу сложения
векторов, скорость
(она равна перпендикуляру
,
получим, согласно правилу сложения
векторов, скорость
(она равна перпендикуляру
![]() )
и скорость
(она совпадает с отрезком, отсеченным
перпендикуляром
,
на луче
).
Измеряем длину отрезка
и, пользуясь масштабом скоростей, находим
)
и скорость
(она совпадает с отрезком, отсеченным
перпендикуляром
,
на луче
).
Измеряем длину отрезка
и, пользуясь масштабом скоростей, находим
![]() . (2.8)
. (2.8)
Учитывая,
что точка
![]() стержня
стержня
![]() закреплена, звено может совершать только
вращение вокруг точки
и вектор
закреплена, звено может совершать только
вращение вокруг точки
и вектор
![]() перпендикулярен к
,
строим перпендикулярно звену луч
перпендикулярен к
,
строим перпендикулярно звену луч
![]() ,
по которому будем откладывать скорость
точки
.
Применяем к точкам
и
теорему:
,
по которому будем откладывать скорость
точки
.
Применяем к точкам
и
теорему:
![]() , (2.9)
, (2.9)
где
![]() – скорость точки
относительно точки
.
– скорость точки
относительно точки
.
Проводим
из конца вектора
![]() ,
изображающего скорость
,
изображающего скорость
![]() ,
перпендикуляр к
,
перпендикуляр к
![]() .
Продлив его до пересечения с лучом
,
получим скорость
(она равна перпендикуляру
.
Продлив его до пересечения с лучом
,
получим скорость
(она равна перпендикуляру
![]() )
и скорость
(она совпадает с отрезком, отсеченным
перпендикуляром
,
на луче
).
Измеряем длину отрезка
и, пользуясь масштабом скоростей, находим
)
и скорость
(она совпадает с отрезком, отсеченным
перпендикуляром
,
на луче
).
Измеряем длину отрезка
и, пользуясь масштабом скоростей, находим
![]() . (2.10)
. (2.10)
Чтобы найти скорость точки , составим два равенства:
![]() , (2.11)
, (2.11)
где
![]() и
и
![]() – скорости точки
относительно точек
и
.
– скорости точки
относительно точек
и
.
Скорость
будет лежать на перпендикуляре, опущенном
из конца вектора
,
изображающего скорость
,
к
![]() .
Скорость
будет лежать на перпендикуляре, опущенном
из конца вектора
,
изображающего скорость
,
к
.
Скорость
будет лежать на перпендикуляре, опущенном
из конца вектора
,
изображающего скорость
,
к
![]() .
Получив точку пересечения этих
перпендикуляров
,
измеряем длину отрезка
и, пользуясь масштабом скоростей, находим
.
Получив точку пересечения этих
перпендикуляров
,
измеряем длину отрезка
и, пользуясь масштабом скоростей, находим
![]() . (2.12)
. (2.12)
б) Определение угловых скоростей звеньев механизма. Отрезок плана скоростей отражает вращательную скорость точки вокруг точки :
![]() . (2.13)
. (2.13)
Отсюда угловая скорость звена
![]() . (2.14)
. (2.14)
Аналогично
определяем угловые скорости звеньев
![]() ,
,
,
,
![]() :
:
![]() . (2.15)
. (2.15)
![]() . (2.16)
. (2.16)
![]() . (2.17)
. (2.17)
Угловую скорость звена можно определить и следующим образом:
![]() . (2.17’)
. (2.17’)
Угловую
скорость звена
определим по вращательной скорости
точки
вокруг неподвижного центра
![]() :
:
![]() . (2.18)
. (2.18)
Аналогично
определяем угловые скорости звеньев
![]() и
и
![]() :
:
![]() . (2.19)
. (2.19)
![]() . (2.20)
. (2.20)
Определение скоростей точек и угловых скоростей звеньев механизма при помощи мгновенных центров скоростей.
а)
Определение положения мгновенных
центров скоростей звеньев механизма.
Строим механизм в выбранном масштабе
(рис. 2.7). Звенья
![]() ,
,
,
вращаются вокруг неподвижных центров
,
,
,
вращаются вокруг неподвижных центров
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
Мгновенный
центр скоростей
![]() звена
находится как точка пересечения
перпендикуляров, проведенных из точек
и
к их скоростям. Аналогично находим
положение мгновенных центров скоростей
звена
находится как точка пересечения
перпендикуляров, проведенных из точек
и
к их скоростям. Аналогично находим
положение мгновенных центров скоростей
![]() и
и
![]() .
Мгновенный центр скоростей звена
лежит в бесконечности.
.
Мгновенный центр скоростей звена
лежит в бесконечности.
б) Определение скоростей точек. Скорость точки
![]()

![]() . (2.21)
. (2.21)
Скорости точек
звена
пропорциональны расстояниям от точек
до мгновенного центра скоростей
![]() :
:
![]() ,
,
![]() .
(2.22)
.
(2.22)
И
Рис. 2.7![]() см,
см,
![]() см,
см,
![]() см. Тогда скорости точек
и
согласно (2.22) будут равны:
см. Тогда скорости точек
и
согласно (2.22) будут равны:
![]() , (2.23)
, (2.23)
![]() . (2.24)
. (2.24)
Для определения скорости точки составим пропорцию
![]() , (2.25)
, (2.25)
откуда получим
![]() . (2.26)
. (2.26)
Т.к. мгновенный центр скоростей звена находится в бесконечности, то
![]() . (2.27)
. (2.27)
Для определения скоростей точек и составим пропорции:
![]() ,
,
![]() (2.28)
(2.28)
откуда получим
![]() , (2.29)
, (2.29)
![]() , (2.30)
, (2.30)
Одновременно с определением модулей скоростей точек находим их направления, а также направления вращения звеньев механизма. Например, по направлению скорости точки и положению мгновенного центра скоростей , устанавливаем, что вращение звена происходит по часовой стрелке. Поэтому скорость точки при данном положении механизма направлена вверх.
Аналогично определяем направления вращения остальных звеньев и направления скоростей точек механизма (см. рис. 2.7).
в) Определение угловых скоростей звеньев механизма. Скорость любой точки звена равна произведению угловой скорости этого звена на расстояние от точки до мгновенного центра скоростей:
![]() . (2.31)
. (2.31)
Отсюда определяем угловые скорости звеньев и :
![]() , (2.32)
, (2.32)
![]() . (2.33)
. (2.33)
Угловую
скорость звена
![]() определим по скорости точки
:
определим по скорости точки
:
![]() . (2.34)
. (2.34)
Угловая скорость звена при данном положении механизма равна нулю, так как мгновенный центр скоростей звена в этом случае находится в бесконечности:
![]() . (2.35)
. (2.35)
Аналогично определяем угловые скорости остальных звеньев механизма:
![]() . (2.36)
. (2.36)
![]() . (2.37)
. (2.37)
![]() . (2.38)
. (2.38)
Определение ускорений точек , , и угловых ускорений звеньев и .
а)
Определение
![]() ,
,
![]() и
и
![]() (рис. 2.8). Определяем ускорение точки
при помощи теоремы об ускорениях точек
плоской фигуры:
(рис. 2.8). Определяем ускорение точки
при помощи теоремы об ускорениях точек
плоской фигуры:
![]() . (2.39)
. (2.39)
Т ак
как кривошип
вращается равномерно, то ускорение
точки
направлено к центру
и равно:
ак
как кривошип
вращается равномерно, то ускорение
точки
направлено к центру
и равно:
![]()
![]()
![]() . (2.40)
. (2.40)
Нормальное ускорение точки во вращательном движении шатуна вокруг полюса направлено от точки к точке и равно:
Рис. 2.8![]()
![]() . (2.41)
. (2.41)
Откладываем
от точки
в соответствующем масштабе ускорение
полюса
![]() .
Из конца вектора
строим вектор
.
Из конца вектора
строим вектор
![]() ,
проводя его параллельно
,
проводя его параллельно
![]() .
Через конец вектора
проводим прямую, перпендикулярную
,
т.е. параллельную тангенциальному
ускорению
.
Через конец вектора
проводим прямую, перпендикулярную
,
т.е. параллельную тангенциальному
ускорению
![]() .
Точка пересечения этой прямой с прямой,
по которой направлен вектор ускорения
ползуна
,
определяет концы векторов
.
Точка пересечения этой прямой с прямой,
по которой направлен вектор ускорения
ползуна
,
определяет концы векторов
![]() и
.
и
.
Из геометрии чертежа получаем:
![]() ,
,
![]() . (2.42)
. (2.42)
Т.к.
![]() ,
то угловое ускорение звена
,
то угловое ускорение звена
![]()

![]() . (2.43)
. (2.43)
б)
Определение
![]() и
и
![]() (рис. 2.9). Точка
принадлежит двум звеньям:
и
.
Взяв за полюс точку
,
получим:
(рис. 2.9). Точка
принадлежит двум звеньям:
и
.
Взяв за полюс точку
,
получим:
![]() . (2.44)
. (2.44)
У
Рис. 2.9![]() .
.
Нормальное ускорение точки во вращательном движении звена вокруг полюса направлено от точки к точке и равно:
![]() . (2.45)
. (2.45)
Откладываем
от точки
в соответствующем масштабе ускорение
полюса
.
Из конца вектора
строим вектор
![]() ,
проводя его параллельно
,
проводя его параллельно
![]() .
Через конец вектора
проводим прямую
.
Через конец вектора
проводим прямую
![]() перпендикулярно к
,
т.е. параллельно тангенциальному
ускорению
перпендикулярно к
,
т.е. параллельно тангенциальному
ускорению
![]() .
Однако определить ускорение
.
Однако определить ускорение
![]() этим построением невозможно, так как
его направление неизвестно.
этим построением невозможно, так как
его направление неизвестно.
Чтобы найти ускорение точки , необходимо выполнить второе построение, рассматривая эту точку как принадлежащую звену . В этом случае
![]() . (2.46)
. (2.46)
Нормальное ускорение точки
![]() . (2.47)
. (2.47)
Откладываем
от точки
вектор
![]() ,
направив его к центру
.
Через конец вектора
проводим прямую
,
направив его к центру
.
Через конец вектора
проводим прямую
![]() перпендикулярно к
,
т.е. параллельно тангенциальному
ускорению
перпендикулярно к
,
т.е. параллельно тангенциальному
ускорению
![]() .
Точка пересечения этой прямой с
определяет концы векторов
,
.
Точка пересечения этой прямой с
определяет концы векторов
,
![]() и
.
и
.
Из геометрии чертежа получаем:
![]() ,
,
![]() . (2.48)
. (2.48)
Т.к.
![]() ,
то угловое ускорение звена
,
то угловое ускорение звена
![]() . (2.49)
. (2.49)
О
 пределение
положения мгновенного центра ускорений
звена
(рис. 2.10). Примем точку
за полюс. Тогда ускорение точки
пределение
положения мгновенного центра ускорений
звена
(рис. 2.10). Примем точку
за полюс. Тогда ускорение точки
![]() .
(2.50)
.
(2.50)
С
Рис. 2.10![]() выражает ускорение точки
во вращении
вокруг полюса
.
Ускорение
составляет с отрезком
угол
выражает ускорение точки
во вращении
вокруг полюса
.
Ускорение
составляет с отрезком
угол
![]() ,
который можно определить из геометрии
чертежа.
,
который можно определить из геометрии
чертежа.
Направление
вектора
относительно полюса
позволяет определить направление
,
в данном случае соответствующее
направлению вращения часовой стрелки.
Отложив угол
от векторов
и
в этом направлении и проводя две
полупрямые, найдем точку их пересечения
![]() – мгновенный центр ускорений звена
.
– мгновенный центр ускорений звена
.
Определение ускорения точки . Найдем ускорение точки при помощи мгновенного центра ускорений.
Ускорения точек плоской фигуры пропорциональны их расстояниям до мгновенного центра ускорений. Следовательно,
![]() . (2.51)
. (2.51)
Расстояния
![]() и
и
![]() определены путем измерения на чертеже.
Ускорение
определены путем измерения на чертеже.
Ускорение
![]() (рис. 2.10) составляет с прямой
угол
;
направление этого вектора соответствует
угловому ускорению
.
(рис. 2.10) составляет с прямой
угол
;
направление этого вектора соответствует
угловому ускорению
.
Результаты приведены в ответе в виде табл. 5.
Ответ:
Таблица 5. Результаты решения примера 2
Способ |
Скорости точек, |
|||||||||||||
А |
B |
C |
D |
E |
F |
G |
H |
|||||||
План скоростей |
24 |
17,5 |
17,5 |
17,5 |
17,5 |
17,5 |
14,8 |
14,4 |
||||||
МЦС |
24 |
17,3 |
17,5 |
17,4 |
17,4 |
17,4 |
14,6 |
14,1 |
||||||
Способ |
Угловые скорости звеньев, |
|||||||||||||
АB |
AD |
DE |
|
|
|
|
||||||||
План скоростей |
0,424 |
0,500 |
0 |
0,547 |
0,972 |
0,272 |
0,740 |
|||||||
МЦС |
0,421 |
0,505 |
0 |
0,544 |
0,967 |
0,278 |
0,730 |
|||||||