

Лабораторная работа №8 оптимизация параметров технических объектов средствами сапр
(4 часа)
Цель работы: получить практические навыки и изучить структуру программного обеспечения, предназначенного для оптимизации конструкций на основе метода конечных элементов
Техническое и программное обеспечение:
1) персональный IBM-PC или совместимый компьютер на базе процессора Intel Pentium IV или выше;
2) операционная система Microsoft Windows 2000 или выше;
3) система автоматизации конструкторского проектирования SolidWorks 2001;
4) система анализа напряженно-деформированного состояния тел МАКС;
5) текстовый редактор Microsoft Word 2000 или выше;
6) лазерный принтер.
Описание работы:
Современные требования к технологическим машинам и иным объектам кузнечно-штамповочного производства диктуются новейшей тенденцией: конкурентоспособность определяется не только традиционными показателями производительности, прочности, надежности, долговечности, экономичности машины, но и, главным образом, качеством выполняемой работы. Для этой цели необходимы математическое моделирование и анализ функциональных возможностей конкретной проектируемой машины. Кривошипные прессы представляют собой замкнутые контактные системы. По отношению к единой (полной) системе деталей пресса все силы, возникающие при его работе, являются внутренними и заранее не известными, за исключением номинальных или предусмотренных технологических усилий, которые развиваются в штамповых блоках и определенным образом контролируются.
Качество технологического процесса и конечного изделия зависит от ряда факторов, но более всего от деформируемости и кинематической подвижности контактно взаимодействующих деталей пресса, среди которых стол станины и ползун, непосредственно воздействующие на штамповый блок, вызывают в деталях последнего деформации и кинематические - линейные и угловые - смещения, ограничивающие диапазон возможной точной штамповки.
К этой же самой задаче механики контактных систем относится и проблема принятия правильного конструкторского решения, которое обеспечило бы более или менее оптимальное сочетание прочности и металлоемкости конструкции. Таким образом, технологическая и конструкторская цепь образуют двуединую цепь, достижимую в общих случаях структур и нагружений машин только на основе системного подхода.
Применение ЭВМ в проектировании позволяет не только рассчитывать детали методами классической механики, но и применять методы, недоступные при ручной обработке. Одним из таких методов является метод конечных элементов (МКЭ). С его помощью можно решать задачи из области статики, динамики, теплотехники, гидро- и аэродинамики, механики сплошных сред, магнитогидродинамики, механики грунтов, электрического и магнитного поля. К основным преимуществам МКЭ относят простоту и доступность его понимания, применимость для задач с произвольной формой области решения, возможность создания на основе метода высококачественных универсальных программ для ЭВМ. Постановка задачи конструкторской механики контактных систем, положенная в основу теоретического принятия решения в САПР, предусматривает:
исследование статической системы любого конечного числа упругих трехмерных тел, контактно взаимодействующих при произвольных начальных зазорах, натягах и их сочетаниях;
наличие в системе любых вариантов взаиморасположения, контактирования и конфигурации тел, практически встречающихся в машиностроительных конструкциях;
задание внешних по отношению к системе активных нагрузок и внешних граничных условий - в виде наложения или отсутствия связей, исключающих те или иные перемещения точек тел;
учет у каждого из контактирующих тел от нуля до шести имеющихся кинематических - как у абсолютно твердого тела - степеней свободы, реализуемых при перемещениях, вызванных деформированием тел нагруженной системы;
дискретизацию областей поверхностей возможного контактирования смежных тел множествами попарно сопряженных точек, которые могут войти в контакт друг с другом в нагруженном состоянии системы.
Практическая цель численного моделирования заключается в:
получении высокоточной информации о полях сил контактных взаимодействий, деформаций и напряжений - полной и одинаково достоверной картины для всех точек и направлений в объеме каждой проектируемой детали;
исследование функциональных возможностей выполнения технологических операций с той или иной точностью, зависящей от конструкции.
В общем случае алгоритм МКЭ состоит из четырех этапов:
Выделение конечных элементов (разбиение заданной области на конечные элементы);
Определение аппроксимирующей функции для каждого элемента (определение функции элемента);
Объединение конечных элементов в ансамбль, т.е. объединение уравнений, относящихся к отдельным элементам в систему алгебраических уравнений;
Определение вектора узловых значений функции.
Важным этапом в МКЭ является разбиение области на элементы, от качества выполнения которого во многом зависит точность получаемых результатов. Возможность легко варьировать размерами элементов - важное свойство МКЭ. Разбиение области на элементы обычно начинают от ее границы с целью наиболее точной аппроксимации формы границы, затем производят разбиение внутренних областей. Следующая процедура этапа выделения конечных элементов - нумерация узлов элементов (глобальная нумерация узлов). Под числом степеней свободы понимают количество неизвестных функций, определяемых в каждом узле. Информация о способе разбиения области на конечные элементы и нумерации узлов является исходной для всех следующих этапов алгоритмов МКЭ при реализации метода в САПР. При этом требуется указывать не только номер, но и координаты каждого узла и его принадлежность к определенным конечным элементам. Такого рода информация называется топологической.
Архитектура и программные средства САПР МКЭ соответствуют его функциональной цели как инструмента эффективного численного моделирования в общем случае трехмерных контактных систем линейно-упругих тел. Системы произвольного числа контактно взаимодействующих тел порождают весьма широкий класс задач механики, именуемых контактными. В качестве особого, простейшего подкласса указанных задач в САПР МКЭ рассматривается и традиционная для механики задача автономного моделирования одного тела, для которого непосредственно заданы внешние нагрузки и граничные условия. Такого рода задачи именуются бесконтактными. Архитектура большинства САПР МКЭ (рис. 7) является открытой: модульный принцип построения программ, реализованный при различных вариантах сочетания жесткого и гибкого межмодульного интерфейса. Программными средствами САПР МКЭ могут быть аппроксимированы:
двумерные напряженные состояния;
состояние чистого поперечного изгиба тонких пластинок;
пространственное состояние тонкостенных - пластинчатых и оболочечных конструкций;
трехмерное напряженное состояние;
комбинированное напряженное состояние составных конструкций, образованных монолитным соединением массивных и тонкостенных подконструкций, моделируемых в различных напряженных состояниях.
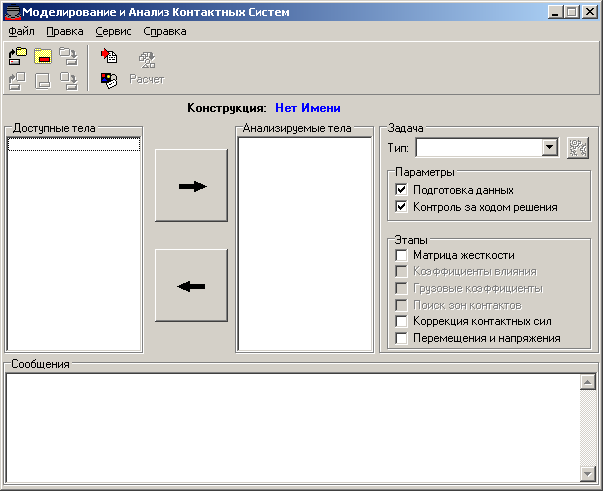
Рис. 7. Рабочее окно САПР МКЭ МАКС for Windows
Построение и описание конечно-элементных моделей контактных систем обеспечивает препроцессор (процессор генерации исходных данных) - инструмент поддержания интерактивного режима построения конечно-элементной модели исследуемой конструкции с определением необходимых исходных данных. Построение модели проводится в два этапа:
построение геометрии конструкции, включающей такие понятия, как “точка”, “линия”, “поверхность”, “объем”;
построение сетки конечных элементов (на основе геометрии конструкции), включающей такие понятия, как “узел” и “элемент”. На этом же этапе задаются статические и кинематические граничные условия на созданной сетке конечных элементов, включающие такие понятия, как “сила”, “момент”, “перемещения”, а также свойства материала и толщины плоских элементов.
Для расчетов по методу конечных элементов деталь (ее геометрическая форма) представляется с помощью конечного числа элементарных элементов. Все элементы имеют простую форму, а также упрощенные (усредненные) напряженное и деформированное состояние.
Отдельные элементы в угловых точках, или в так называемых узловых точках, связаны, нагружены или просто покоятся, т.е. давят своим весом. Механическое поведение элементов и всей структуры описывается с трех позиций. Прежде всего, эти соображения базируются на оценке физического поведения упругодеформируемых несущих единиц конструкции и трактуются следующим образом:
внешние и внутренние силы должны находится в равновесии (статическое равновесие);
смежные элементы после деформации не должны ни отходить один от другого, ни проникать друг в друга и в кинематически (по положению) определяемых крайних узловых точках должны соответствовать краевым граничным условиям (кинематическое равновесие);
связь между напряжениями и деформациями определяется физическими соотношениями теории упругости или пластичности.
Для условия статического равновесия это означает:
![]() ,
(8.1)
,
(8.1)
где [A] - матрица операций дифференцирования; [G] - вектор-столбец напряжений и [Fv] - вектор-столбец объемных сил.
Для условия кинематического равновесия:
![]() ,
(8.2)
,
(8.2)
где {e} - вектор деформаций; [B] - матрица связи деформаций и узловых смещений; {} - вектор узловых смещений.
Условие кинематического равновесия выполнено, если смещение u в каждой точке постоянно. При этом первая производная перемещения может быть постоянной только на отдельных элементах.
Напряжение {} и деформацию {} связывает диаграмма “растяжение-сжатие”. В линейно-упругой области эта зависимость описывается законом Гука с помощью матрицы упругости [D]:
![]() .
(8.3)
.
(8.3)
Составляемая с учетом указанных соотношений система парциальных дифференциальных уравнений интегрируется для заданных статических и кинематических граничных условий. Это интегрирование осуществимо только при сильном упрощении, т.е. при простой геометрии и нагрузке и основывается, прежде всего, на физической идеализации. Прежде всего идеализация означает, что одно из двух условий равновесия (статического или кинематического) выполняется точно, а второе - приближенно. В качестве вариационного принципа при этом используют принцип виртуальной работы, т.е. работы на возможных перемещениях. Согласно этому принципу внешняя виртуальная работа, совершаемая под действием внешней нагрузки и вызывающая виртуальное смещение, равна внутренней виртуальной работе, совершаемой под действием напряжения, вызывающего виртуальное смещение, если напряжения статически уравновешены с внешними нагрузками. Работа с препроцессором состоит в употреблении соответствующих команд в интерактивном режиме.
Препроцессор должен автоматически проверять правильность синтаксиса команд. В качестве препроцессоров современных САПР МКЭ используются системы геометрического моделирования, например SolidWorks (рис. 8).
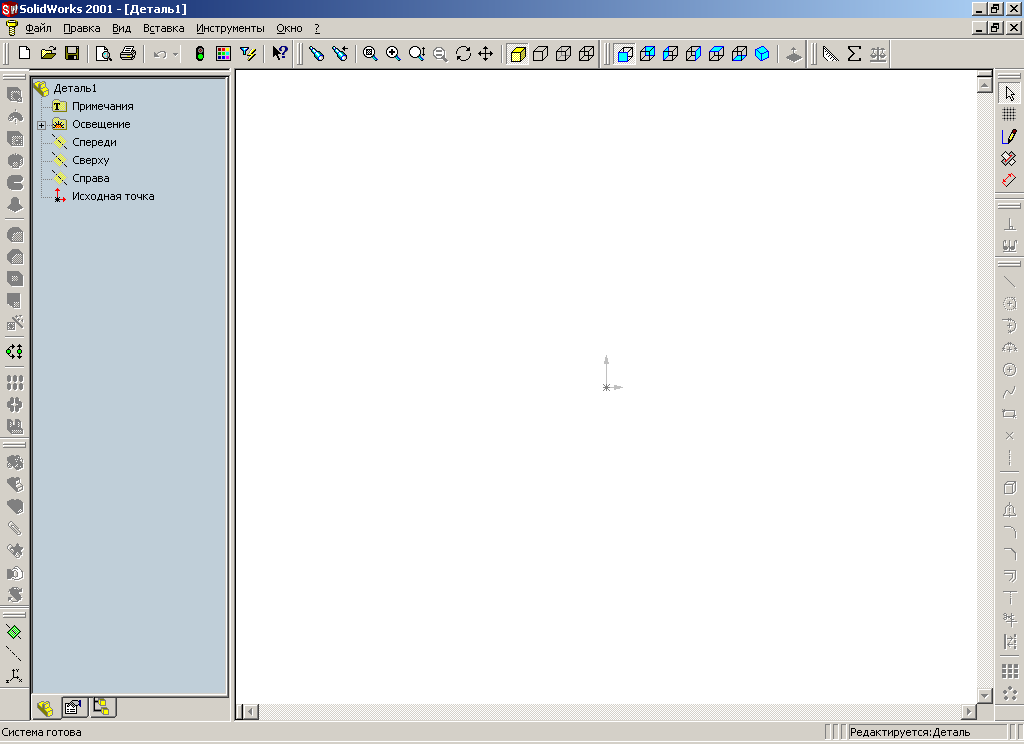
Рис. 8. Рабочее окно системы SolidWorks, используемой
в качестве препроцессора САПР МКЭ MAKC for Windows
При подготовке конечно-элементной модели (построении сетки конечных элементов) используют элементы, находящиеся в базе данных препроцессора. Управление файлами ограничивается процедурами записи и считывания. Для решения задач о контактном взаимодействии деталей машин кузнечно-штамповочного производства применяется схема построения МКЭ, соответствующая принципу виртуальных перемещений Лагранжа. Принцип виртуальных перемещений является основой описания статических состояний любых механических систем. Основными неизвестными при таком подходе являются принятые перемещения узлов ансамблей конечных элементов.
На основе рассматриваемых двух условий равновесия были созданы метод сил и перемещений для расчетов по методу конечных перемещений. Метод сил использует конечные элементы, в которых напряжения распределены так, что не нарушаются условия статического равновесия.
А при расчетах по методу перемещений благодаря поэлементному приращению смещений выполняются кинематические условия. Для решения систем уравнений в методе конечных элементов применяются методы двух групп: прямые методы, когда определяется точное решение (метод Гаусса), и косвенные методы, когда решение определяется на основе последовательной аппроксимации (метод Гаусса-Зейделя). Построение модели в рассматриваемых системах проводится в два этапа:
в системе геометрического моделирования SolidWorks 2000 производят построения геометрии конструкции, включающей такие понятия, как “точка”, “линия”, “поверхность”, “объем”;
с помощью автоматического генератора сеток конечных элементов программы Cosmos/DesignStar, выполненной в виде надстройки над SolidWorks, производят построение сетки конечных элементов (на основе созданной геометрии конструкции), включающей такие понятия, как “узел” и “элемент”. На этом же этапе задаются статические и кинематические граничные условия на созданной сетке конечных элементов, включающей такие понятия, как “сила”, “момент”, “перемещения”, а также свойства материала и толщины плоских элементов.
При подготовке конечно-элементной модели автоматически используются следующие типы элементов, включенные в библиотеку комплекса МАКС, перечисленные в таблице 4.
Таблица 4
№ |
Описание |
1 |
Плоский треугольный элемент |
2 |
Плоский изопараметрический четырехугольник |
3 |
Осесимметричный треугольный элемент |
4 |
Пластинчаты7й треугольный элемент |
5 |
Пластинчатый прямоугольный элемент |
Кроме препроцессоров, САПР МКЭ оснащаются специализированными программами, предназначенными для графического представления на экране дисплея основных результатов конечно-элементного моделирования трехмерных контактных систем, именуемые постпроцессорами.
Работа с постпроцессорами (рис. 9) осуществляется в интерактивном режиме с использованием многоуровнего меню. Постпроцессор большинства САПР МКЭ позволяет отобразить на экране дисплея:
примененную для моделирования данного тела сетку конечных элементов;
картины пространственного распределения в рассматриваемом теле полученных в результате моделирования узловых характеристик нагруженного состояния;
интересующее пользователя численное значение той или иной узловой характеристики нагруженного состояния тела в конкретном узле;
любую увеличенную пользователем часть изображения;
информацию, относящуюся к выбранному сечению;
несколько окон для рассмотрения различных фрагментов детали и (или) анализируемых характеристик нагруженного состояния.
В кузнечно-штамповочном производстве метод конечных элементов применяют для анализа напряженно-деформированного состояния кузнечно-штамповочных машин, как целиком, так и отдельных узлов.
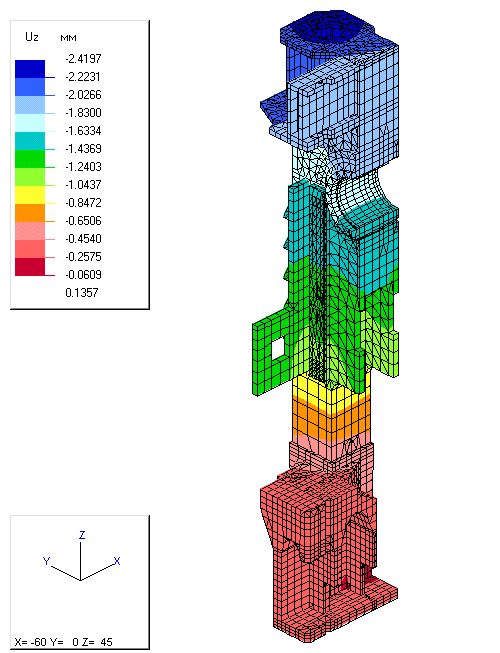
При этом в виду симметричности большинства конструкций машин и прилагаемых к ним нагрузок, достаточно проводить расчет для ½ или ¼ части рассматриваемого узла или машины (рис. 10 и 11). Применительно к таким задачам использование метода конечных элементов позволяет оптимизировать конструкцию машины по многим параметрам, особенно по ее массе и размерам отдельных элементов.
Рис. 9. Рабочее окно постпроцессора
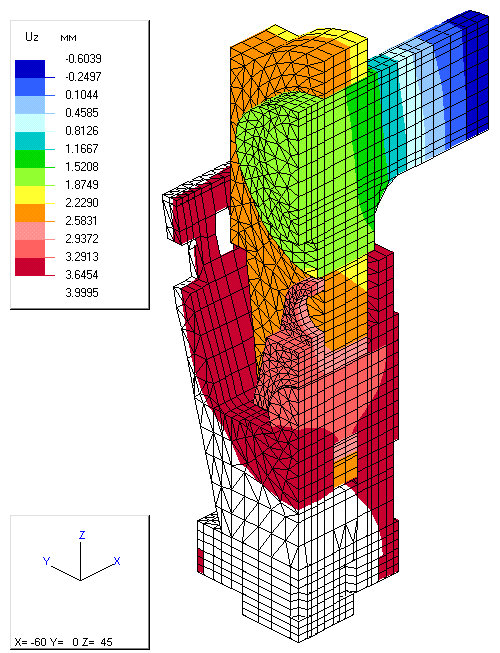
Рис. 10. Вертикальные перемещения станины пресса при затяжке |
Рис. 11. Вертикальные перемещения главного исполнительного механизма при нагружении пресса |
Порядок выполнения работы:
C учетом исходных данных, указанных в выданном преподавателем задании, подготовить исходные данные и произвести расчет напряженно-деформированного состояния детали в комплексе MAKC.
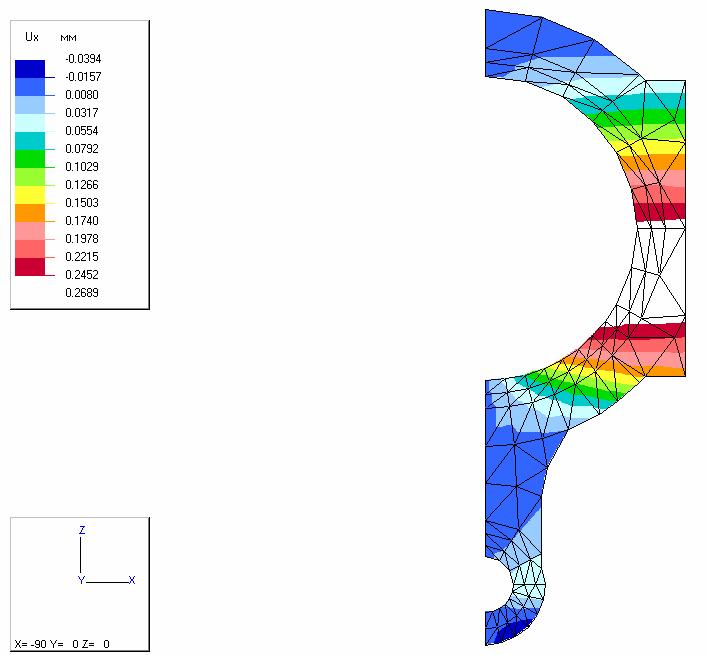
Рис. 12. Пример оформления результатов расчета МКЭ
шатуна механического пресса