

Техническое и программное обеспечение:
1) персональный IBM-PC или совместимый компьютер на базе процессора Intel Pentium IV или выше;
2) операционная система Microsoft Windows 2000 или выше;
система автоматизированного проектирования AutoCAD 2002 или выше;
язык проектирования AutoLISP;
текстовый редактор Microsoft Word 2000 или выше;
лазерный принтер.
Описание работы:
Программное обеспечение COSMOSMotion (рис. 5) предназначено для интерактивного моделирования и расчета широкого класса механизмов и систем механизмов. Программа позволяет повысить качество конструкторских решений, снизить трудоемкость расчетов. Основные возможности подобных систем:
построение и моделирование движения механизмов на экране ЭВМ;
выполнение кинематического и динамического расчета механизма с учетом действия рабочих усилий, масс и моментов инерции звеньев, сил трения;
выявление заклинивания звеньев механизма в процессе движения с выделением группы звеньев, в которой оно произошло. При этом программа отслеживает заклинивание, как по геометрическим, так и по силовым параметрам;
визуализация результатов расчетов в виде таблиц, графиков и диаграмм;
автоматизированное оформление расчетной документации;
работа в интерактивном графическом режиме (без программирования) и интеграция с CAD/CAM системами.
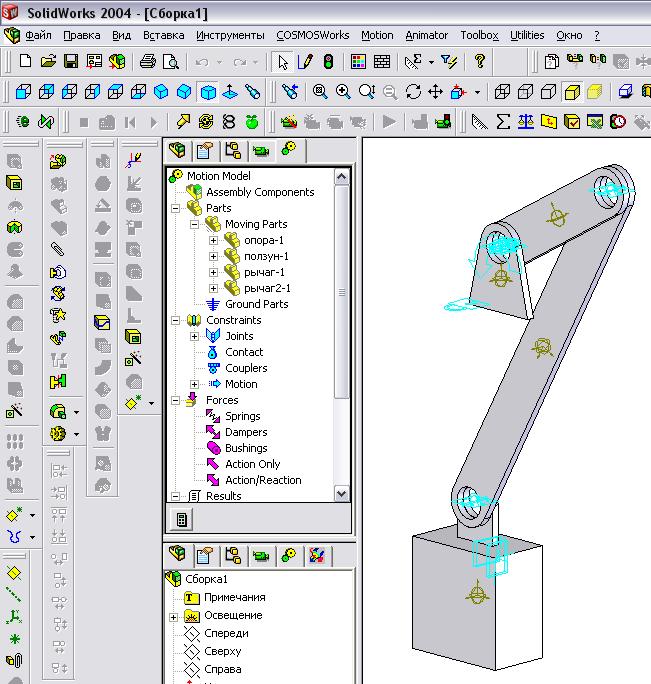
Рис. 5. Пример построения схемы кривошипно-шатунного
механизма в редакторе механизмов программы
COSMOSMotion
Построение кривошипно-шатунного механизма
Общий вид кривошипно-шатунного механизма показан на рис. 6
-


Рис. 6. Реальный кривошипно-ползунный механизм
и его кинематическая схема
Построение схем механизмов необходимо начать с подготовки твердотельных моделей тел, входящих в анализируемый механизм. В общем виде схему любого механизма можно получить из следующей совокупности тел, описание которых приведено в таблице 2.
Таблица 2
Функциональное назначение и описание тел
№ |
Изображение |
Описание |
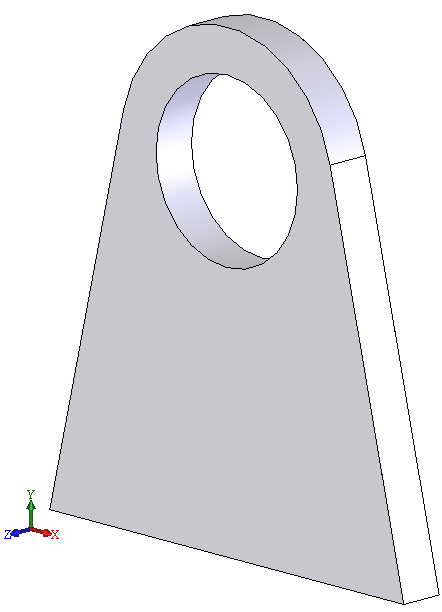
1 |
|
Представляет собой элемент, закрепленный от перемещения по всем трем плоскостям |
Продолжение таблицы 2
№ |
Изображение |
Описание |
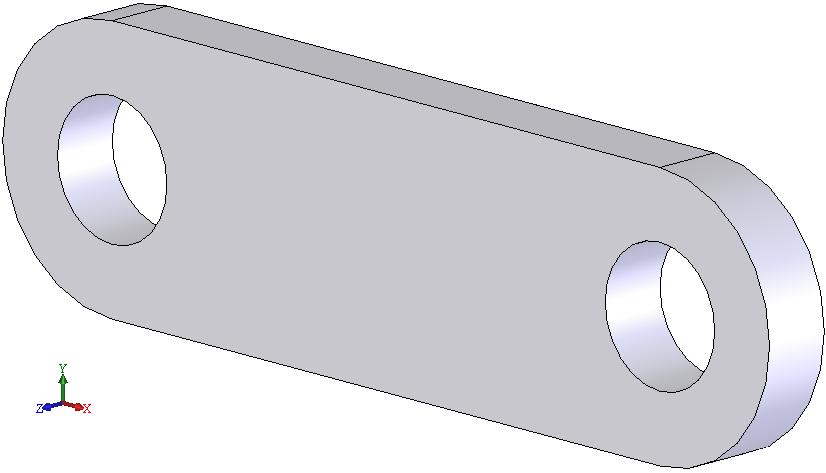
2 |
|
Звено является элементом, которое закрепляется в одной или двух точках и может совершать вращательное движение |
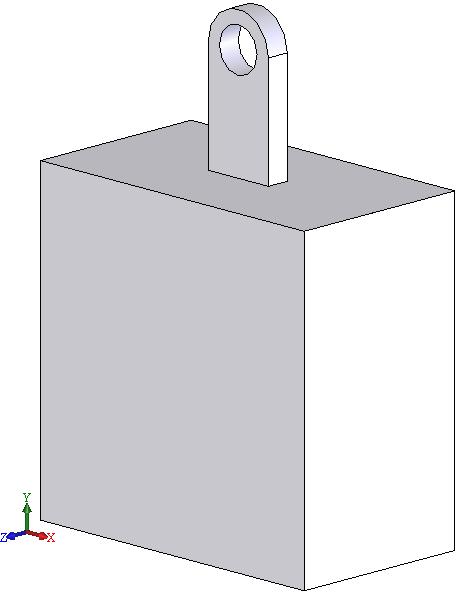
3 |
|
Ползун представляет собой элемент, который закрепляется в верхней точке и может совершать поступательное перемещение по одной из осей |
Далее механизм собирается типовыми сборочными операциями программы SolidWorks в документе специального назначения – Сборка. Открытие дерева проводника IntelliMotion позволяет увидеть, в наглядной древовидной структуре, параметры получившейся математической модели механизма с установленными сопряжениями, взаимосвязями и параметрами ведущего звена.