

1. Цель работы
Расчет, реализация и экспериментальное исследование двухконтурной СПР с настройкой на МО (позиционная ИС).
2. Теоретические пояснения
ИС с управлением по скорости, как
правило, двухконтурные. Внутренний
контур обеспечивает высокое быстродействие
и точность регулирования тока и как
показано на рис.1 включает в себя регулятор
тока, ШИП, электромагнитную цепь двигателя
и звено
![]() ,
описывающее цепь обратной связи по
току.
,
описывающее цепь обратной связи по
току.
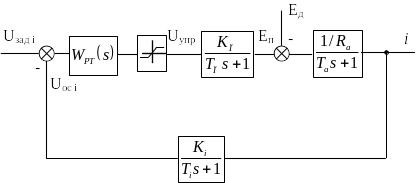
Рис.1. Контур тока
Наибольшей постоянной, подлежащей
компенсации, является обычно
![]() .
Малая не компенсируемая
.
Малая не компенсируемая
![]() этого контура определяется значениями
этого контура определяется значениями
![]() и
и
![]() .
Контур тока подчинен контуру скорости.
Получаемые за счет ООС по току и настройки
высокие динамические и статические
свойства внутреннего контура существенно
упрощают задачу управления скоростью,
являющейся основной регулируемой
переменной.
.
Контур тока подчинен контуру скорости.
Получаемые за счет ООС по току и настройки
высокие динамические и статические
свойства внутреннего контура существенно
упрощают задачу управления скоростью,
являющейся основной регулируемой
переменной.
В контур скорости, как показано на рис.2,
входят: регулятор скорости; звено,
описывающее настроенный на МО контура
тока
![]() ;
интегрирующее звено с постоянной
;
интегрирующее звено с постоянной
![]() ,
описывающее электромеханическую часть
системы ШИП - Д - механизм; звено
,
описывающее электромеханическую часть
системы ШИП - Д - механизм; звено
![]() ,
описывающее цепь обратной связи по
скорости.
,
описывающее цепь обратной связи по
скорости.
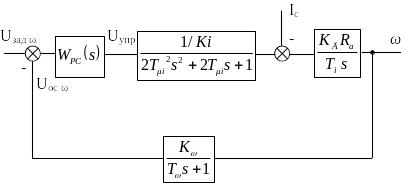
Рис.2. Контур скорости
Наибольшей постоянной в контуре скорости,
подлежащей компенсации, является
.
Малая не компенсируемая постоянная
этого контура
![]() определяется эквивалентной инерционностью
контура тока, настроенного на МО
определяется эквивалентной инерционностью
контура тока, настроенного на МО
![]() и инерционностью цепи обратной связи
по скорости
и инерционностью цепи обратной связи
по скорости
![]() .
.
Расчет и реализацию настроек начинают с внутреннего подчиненного контура тока.
В ИС роботов как с позиционным, так и с контурным управлением крайне необходимо, чтобы контур тока имел астатизм по управлению и малую чувствительность к возмущениям. При этом важна оптимальность по быстродействию, т.е. минимальное время регулирования при практическом отсутствии или весьма малом перерегулировании. Последнее для ИС с интенсивными переходными режимами очевидно. Для ИС, работающих основное время в установившихся режимах, оптимизация контура тока по быстродействию обусловлена необходимостью отработки близких к скачкообразным изменениям нагрузки и ускорений. Кроме этого, оптимизация по быстродействию необходима для ограничения динамических выбросов тока при жестких стопорениях в любых ИС.
Указанные требования к контуру тока реализуются при настройке на МО. В замкнутом состоянии контур приобретает свойства колебательного звена второго порядка с коэффициентом демпфирования 0,707. Его передаточная функция:
. (1)
Когда
![]() (т.е. когда двигатель - апериодическое
звено) для упрощения расчетов пренебрегают
влиянием ЭДС двигателя, которая является
возмущением для цепи формирования тока.
Это оправдано, так как в указанном случае
канал формирования ЭДС имеет относительно
большую инерционность
.
ЭДС двигателя изменяется медленно по
сравнению с процессами в цепи формирования
тока и эта цепь остается практически в
установившемся режиме.
(т.е. когда двигатель - апериодическое
звено) для упрощения расчетов пренебрегают
влиянием ЭДС двигателя, которая является
возмущением для цепи формирования тока.
Это оправдано, так как в указанном случае
канал формирования ЭДС имеет относительно
большую инерционность
.
ЭДС двигателя изменяется медленно по
сравнению с процессами в цепи формирования
тока и эта цепь остается практически в
установившемся режиме.
В контуре тока малую некомпенсируемую постоянную можно рассчитать
![]() .
(2)
.
(2)
Однако без заметной погрешности ее часто вычисляют
![]() . (3)
. (3)
Нетрудно показать, что для настройки контура тока на МО требуется ПИ-регулятор, передаточную функцию которого удобно представлять в виде
![]() .
(4)
.
(4)
Параметры ПИ-регулятора при настройке контура на МО
![]() ,
,
![]() .
(5)
.
(5)
Далее выполняют настройку контура скорости.
В ИС, работающих большую часть времени в переходных режимах, требуется в первую очередь точная, астатическая отработка управляющих воздействий на интенсивное изменение скорости (разгон, торможение). Необходима также оптимизация контура по быстродействию. Как известно, все это обеспечивается настройкой на МО. Если объектом с большой постоянной является интегрирующее звено, то необходим П-регулятор. Таким образом, ИС оказывается однократно интегрирующей.
Для упрощения расчета настройки контура
скорости в ПФ оптимизированного
контура тока
![]() пренебрегают малой второго порядка
пренебрегают малой второго порядка
![]() ,
т.е. аппроксимируют колебательное
звено апериодическим с ПФ
,
т.е. аппроксимируют колебательное
звено апериодическим с ПФ
![]() .
(6)
.
(6)
Тогда малую постоянную контура скорости определяют как
![]() , (7)
, (7)
или без заметной погрешности
![]() .
(8)
.
(8)
Регулятор скорости, обеспечивающий настройку на МО, должен иметь коэффициент передачи
![]() .
(9)
.
(9)
Параметры переходной характеристики
при настроке контура на МО: время первого
согласования
![]() ;
время достижения максимума
;
время достижения максимума
![]() ;
максимальное перерегулирование
;
максимальное перерегулирование
![]() .
.
Напомним, что настройка на МО целесообразна
при
![]() .
.