

5. Индивидуальное задание
На основе математической модели системы подчиненного регулирования в среде MATLAB исследовать влияние ограничения сигнала задания контура тока на динамические и статические свойства цепей формирования тока и скорости.
5.1. Составить в среде MATLAB структурную схему СПР, которая включает в себя РС, РТ, ШИП, двигатель постоянного тока и цепи обратных связей по скорости ДС и току ДТ, как показано на рисунке. Выходное напряжение РТ ограничить значением напряжения питания ±14 В. Задать в m-файле значения параметров передаточных функций неизменяемой части ИС. Задать коэффициенты передачи датчиков скорости К и тока Кi, приводя выходные сигналы этих датчиков к задающему воздействию 10 В при =Д ном и Iа = IД ном .
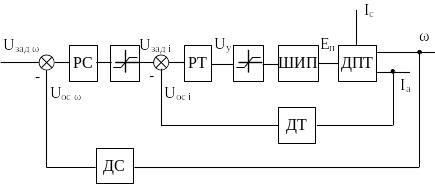
Система подчиненного регулирования последовательным ограничением координаты тока
5.2. Рассчитать коэффициенты передачи регуляторов скорости Крс и тока Крт , а также значение порогового напряжения нелинейного элемента Uнэ для получения экскаваторной нагрузочной характеристики привода со следующими параметрами: хх =Д ном =4000 (об/мин); отс =3800 (об/мин); Iотс=4 (А); Iст= Iд ном =4,2 (А). Выходное напряжение РС ограничить значением напряжения Uнэ.
5.2.1. Построить электромеханическую характеристику системы и зарегистрировать ток стопорения, а также получить зависимость выходного напряжения ШИП от тока, то есть Uп(Ia).
5.2.2. Исследовать переходные процессы в цепи формирования скорости и тока по управлению при пуске двигателя. Зарегистрировать максимальное значение пускового тока.
5.3. Разомкнуть естественную ОС по ЭДС двигателя и выполнить пп. 5.2.1 и 5.2.2.
5.4. Замкнуть ОС по ЭДС и уменьшив значение Uнэ в 2 и 4 раза выполнить пп. 5.2.1 и 5.2.2.
5.5. Соответствующие графики в пп.5.2.-5.4. расположить в одних координатных осях.
6. Методические рекомендации
6.1. Знак сигнала ОС определять без замыкания цепи, по полярности соответствующих сигналов.
6.2. При выполнении индивидуального задания, ДПТ следует представлять структурной схемой с ОС по ЭДС, учитывающей возмущающее воздействие. Рекомендации по получению графиков зависимостей и реализации задающих воздействий приведены в п.6.7 и 6.8 лабораторной работы № 4.
7. Требования к отчёту
Требования к отчету - как в лабораторной работе № 4.
8. Контрольные вопросы
8.1. Как рассчитать ток отсечки?
8.2. Что является возмущением для контура тока?
8.3. Как влияет усиление в контуре тока на жесткость характеристик ИС в зоне стабилизации скорости и в зоне отсечки?
8.4. Как влияет ОС по току на устойчивость СПР?
8.5. Почему и в каких условиях можно при наличии ООС по току пренебречь внутренней обратной связью двигателя по ЭДС?
8.6. Как рассчитать ток стопорения?
8.7. По какой причине на некотором участке переходной характеристики по управлению частота вращения нарастает линейно?
8.8. За счет чего в системе с одной ОС по скорости достижимое быстродействие меньше, чем в этой же системе при ОС по току?
8.9. Как изменяется ток отсечки при уменьшении коэффициента передачи ДТ, при уменьшении уровня ограничения напряжения РС?
8.10. Почему траектория луча на осциллографе при отображении экскаваторной характеристики зависит от скорости изменения тока?
8.11. С какой целью в системе с ОС по скорости используется ООС по току, образующая подчиненный контур?
8.12. В чем проявляется подчиненность контура регулирования тока контуру скорости?
8.13. Как определить ток, при котором ДТ должен иметь максимальное выходное напряжение?
8.14. Как видоизменяется переходной процесс по скорости при уменьшении тока отсечки?
8.15. Чем отличаются переходные процессы по скорости для систем, имеющих одинаковые токи отсечки, но разные токи стопорения?
8.16. Поясните по структурной схеме, с чем связан статизм по возмущению контура тока в СПР с управлением по скорости?
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
Автоматизированный электропривод промышленных установок / Г.Б. Онищенко, М.И. Аксенов, В.П. Грехов и др.; под. ред. Г.Б. Онищенко. – М.:РАСХН, 2001. 352 с.
Андреенко С.Н. Проектирование приводов манипуляторов / С.Н. Андреенко, М.С. Ворошилов, Б.А. Петров. – Л.: Машиностроение, 1975. 312 с.
Андрющенко В.А. Теория систем автоматического управления: учеб. пособие / В.А. Андрющенко. – Л.: Издательство Ленинградского университета, 1990. 256 с.
Башарин А.В. Примеры расчета автоматизированного электропривода на ЭВМ: учеб. пособие для вузов / А.В. Башарин, Ю.В. Постников. – Л.: Энергоатомиздат, 1990. 512 с.
Белов М.П. Автоматизированный электропривод типовых производственных механизмов и технологических комплексов: учебник / М.П. Белов, В.А. Новиков, Л.Н. Рассудов. – М.: Издательский центр «Академия», 2004. 576 с.
Бурдаков С.Ф. Проектирование манипуляторов промышленных роботов и роботизированных комплексов: учеб. пособие / С.Ф. Бурдаков, В.А. Дъяченко, А.Н. Тимофеев. – М.: Высш. шк., 1986. 264 с.
Кочергин В.В. Следящие системы с двигателями постоянного тока. Л.: Энергоатомиздат, 1988. 168 с.
Мамедов В.М. Управление электроприводами постоянного тока: учебное пособие / В.М. Мамедов. – Воронеж: ВПИ, 1983. 132 с.
Поздняков О.И. Электропривод промышленных роботов: учеб. пособие. О.И. Поздняков. – М.: Из-во МПИ, 1990. 116 с.
Ревнёв С.С. Основы моделирования технических систем: учеб. пособие / С.С. Ревнёв, В.А. Трубецкой, Ю.С. Слепокуров. – Воронеж: ГОУ ВПО «Воронежский государственный технический университет», 2008. 115 с.
Сафонов Ю.А. Электроприводы промышленных роботов / Ю.А. Сафонов. – М.: Энергоатомиздат, 1990. 176 с.
Терехов В.М. Системы управления электроприводов: учебник / В.М. Терехов, О.И. Осипов. – М.: Издательский центр «Академия», 2005. 304 с.
Юревич Е.И. Основы робототехники / Е.И. Юревич. – Спб.: БХВ-Петербург, 2005. 416 с.
СОДЕРЖАНИЕ
Лабораторная работа № 4. Исследование исполнительной системы с обратной связью по скорости. |
1 |
Лабораторная работа № 5. Исследование исполнительной системы с обратной связью по току. |
11 |
Лабораторная работа № 6. Исследование исполнительной системы с обратной связью по скорости и задержанной обратной связью по току. |
23 |
Лабораторная работа № 7. Исследование системы управления скоростью с подчиненным контуром тока и последовательным токоограничением. |
30 |
Библиографический список. |
36 |
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
к лабораторным работам № 4-7 по дисциплине
«Исполнительные системы роботов» для студентов специальности 220402 «Роботы и робототехнические системы» очной и очно-заочной форм обучения
Составители:
Ревнёв Станислав Сергеевич
Трубецкой Виктор Александрович
В авторской редакции
Подписано к изданию 20.09.2010.
Уч.-изд. л. 2,2. «С» 33.
ГОУВПО «Воронежский государственный технический университет»