

1. Теоретическая часть
Функция, которая подвергается преобразованию Лапласа, должна обладать следующими свойствами [2, 4, 8]:
1. Функция должна быть определена и дифференцируема по всей положительной полуоси;
2.
Функция должна быть тождественно равна
0 при
![]() ,
т.е. (
,
т.е. (![]() при
);
при
);
3.
Функция должна быть ограниченна, т.е.
для функции
![]() существуют
такие положительные числа М
и с,
что
существуют
такие положительные числа М
и с,
что
![]() при
при
![]() ,
т.е.
,
т.е.
![]() ,
где с
– абсцисса абсолютной сходимости
(некоторое положительное число).
,
где с
– абсцисса абсолютной сходимости
(некоторое положительное число).
Преобразование
Лапласа
это соотношение
вида
 ,
ставящее
функции
вещественного
переменного
,
ставящее
функции
вещественного
переменного
![]() в соответствие функцию
в соответствие функцию
![]() комплексного переменного
комплексного переменного
![]() (
(![]() ).
).
При
этом
называется
оригиналом,
![]() –
изображением.
–
изображением.
Символическая запись преобразования Лапласа, а именно,
![]() ,
где
,
где
![]() – оператор прямого преобразования
Лапласа.
– оператор прямого преобразования
Лапласа.
1.1 Нахождение оригиналов функций по их изображениям
Если изображение функции является дробно-рациональной функцией вида
![]() ,
,
то нахождение оригинала производится по аналитическим формулам:
1. Для случая, когда корни простые, вещественные:
 . (1)
. (1)
2.
Для случая, когда корни простые,
вещественные и один корень нулевой,
т.е.
![]() :
:
 . (2)
. (2)
3.
Для случая, когда корни комплексно-сопряженные,
![]() (считается для одного корня):
(считается для одного корня):
 ,
если
,
если
![]() (3)
(3)
![]() .
.
4. Для случая, когда корни комплексно-сопряженные и один нулевой:
 . (4)
. (4)
2. Практическая часть
Определим порядок вычисления оригинала функции по его изображению:
1.
Вычислить корни полинома
![]() :
:
![]() .
.
Число
корней
![]() равно
равно
![]() порядку полинома
.
порядку полинома
.
2. Выбрать формулу для расчёта оригинала.
3.
Вычислить производную
![]() .
.
4.
Вычислить значения полиномов
![]() и
и
![]() при подстановке корней полинома
знаменателя.
при подстановке корней полинома
знаменателя.
5.
Вычислить значения коэффициентов при
функциях
![]() .
.
Пример 1
 .
.
1.
![]() .
.
2. Корни вещественные, выбираем формулу (1): .
3.
Вычисляем
![]()
![]()
![]() .
.
 .
.
Рассмотрим пример вычисления с использованием MATLAB:
>> p=[1 5 4]; - коэффициенты полинома знаменателя;
>> b=[3]; - коэффициенты полинома числителя;
>>r=roots(p) – вычисление корней знаменателя;
r =
-4
-1
>>r1=r(1); r2=r(2)
>> dp=polyder(p) – вычисление коэффициентов производной ;
dp =
2 5
>> A1=polyval(dp,r1) – вычисление для первого корня;
A1 = 3
>> A2=polyval(dp,r2) – вычисление для второго корня;
A2 = -3
>>В1= polyval(b, r1) – вычисление для первого корня;
В1=3
>> C1=В1./A1 – вычисление коэффициента при первом корне;
C1 = 1
>>В2= polyval(b, r2) – вычисление для второго корня;
В2= 3
>> C2=В2./A2 – вычисление коэффициента при втором корне;
C2 = -1
>> t=[0:0.01:5] ;– интервал времени и шаг счёта;
>> x=C1.*exp(r1.*t)+C2.*exp(r2.*t);
>> plot(t,x),grid on, xlabel('Time(sec)'), ylabel('x(t)')
На рис. 1. приведен график функции, построенный с использованием оператора plot(t,x).
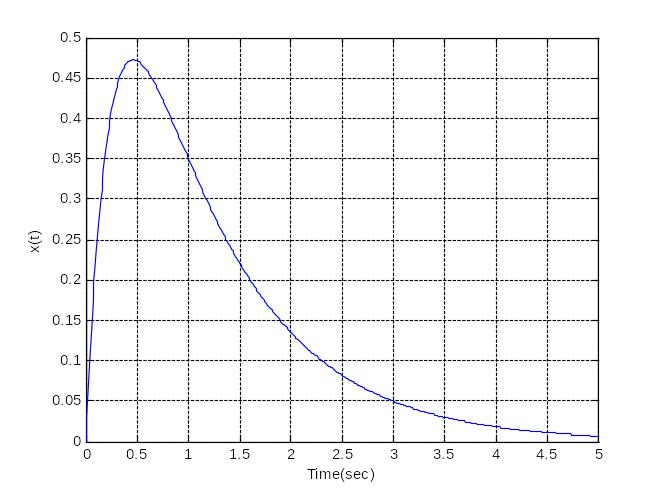
Рис. 1. График функции, построенный с использованием оператора plot(t,x)
Изображению
 соответствует
оригинал
соответствует
оригинал
![]() .
.
Проверим правильность преобразований. Для этого воспользуемся предельными теоремами.
![]()

![]()

Пример 2
1.
![]() .
.
2. Корни вещественные и один нулевой, выбираем формулу (2):
 .
.
3. Вычисляем
![]() .
.
![]() .
.
Воспользуемся результатами расчёта из примера 1 и пересчитаем коэффициенты с использованием MATLAB:
>>C3=C1./(r1) – вычисление коэффициента при первом корне;
C3 = -1
>> C4=C2./(r2) – вычисление коэффициента при втором корне;
C4 = 0.2500
>>В0= polyval(b, 0) – вычисление для нулевого корня;
В0=3
>>А0=polyval(p,0)
– вычисление
![]() для
нулевого корня;
для
нулевого корня;
А0=4
>>С0=В0./А0 – вычисление коэффициента при нулевом корне;
С0=0.75
>> x1=С0+C3.*exp(r1.*t)+C4.*exp(r2.*t);
>> plot(t,x1), grid on, xlabel('Time(sec)'), ylabel('x1(t)')
На рис. 2. приведен график функции, построенный с использованием оператора plot(t,x).
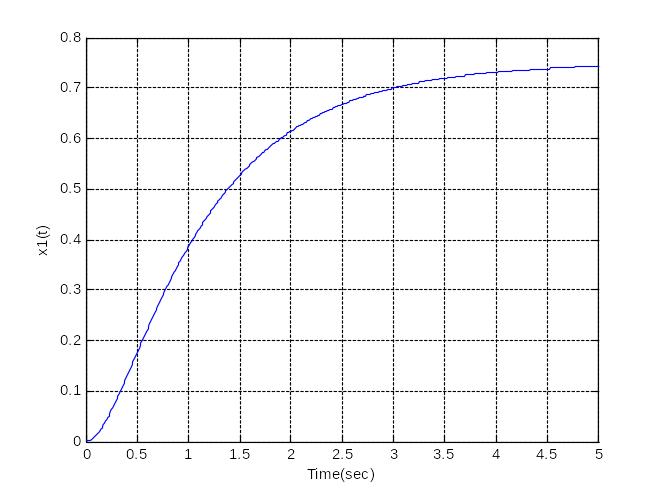
Рис. 2. График функции, построенный с использованием оператора plot(t,x)
Изображению
 соответствует
оригинал
соответствует
оригинал
![]() .
.
Проверим правильность преобразований
![]()
 .
.
![]()
 .
.