

лаб 4
.docx
|
Министерство науки и высшего образования Российской Федерации Калужский филиал федерального государственного бюджетного образовательного учреждения высшего образования «Московский государственный технический университет имени Н.Э. Баумана (национальный исследовательский университет)» (КФ МГТУ им. Н.Э. Баумана) |

ФАКУЛЬТЕТ |
ИУК «Информатика и управление»____________ |
КАФЕДРА |
ИУК3 «Системы автоматического управления и электротехника»_______ |
лабораторная работа №4
«Временные характеристики линейных систем управления.
Определение реакции системы на произвольное входное воздействие»
ДИСЦИПЛИНА: «Основы управления в технических системах»
Выполнил: студент гр. ИУК1-51Б |
_______________ (_Прудников А.Ф.) (Подпись) (Ф.И.О.) |
|
_______________ (_Ломакин С.А.__) (Подпись) (Ф.И.О.)
|
Проверил: |
_______________ (Корнюшин Ю.П._) |
(Подпись) (Ф.И.О.)
Дата сдачи (защиты):
Результаты сдачи (защиты):
- Балльная оценка:
- Оценка:
Калуга, 2021 г.
Цель лабораторной работы: формирование практических навыков по нахождению временных характеристик линейных систем управления.
Задача лабораторной работы: освоение технологии нахождения временных характеристик линейных систем управления экспериментальным методом и согласно формул, в случае задания системы с использованием передаточных функций. Закрепление полученных знаний на практике.
Практическая Часть
Задание 1
 – передаточная
функция первого эксперимента лабораторной
работы №2.
– передаточная
функция первого эксперимента лабораторной
работы №2.
 – передаточная
функция третьего эксперимента лабораторной
работы №2.
– передаточная
функция третьего эксперимента лабораторной
работы №2.
Для первой передаточной функции графики от использования оператора impulse и step отличаются между собой. График первого эксперемента похож на график построенный оператором impulse, а график второго эксперемента похож на график построенный с помощью step.

Рис. 1. – графики, полученные с помощью impulse и step.


Рис. 2. – графики, полученный во второй лабораторной работе.
Для третьей передаточной функции графики от использования оператора impulse и step отличаются между собой. График третьего эксперемента похож на график построенный оператором impulse, а график четвертого на график построенный step.

Рис. 3. – графики, полученные с помощью impulse и step.


Рис. 4. – график, полученный во второй лабораторной работе.
Задание 2
Эксперимент 1


Рис. 5. – входной сигнал с блока step.


Рис. 6. – вынужденное движение системы.


Рис. 6. – свободное движение системы при выключенном step.

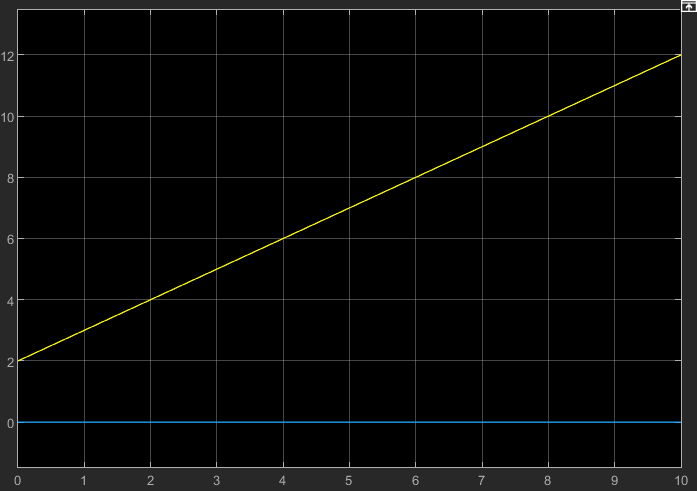
Рис. 7. – свободное движение системы при включенном step.
Эксперимент 2
Рис. 8. – входной сигнал с блока step.

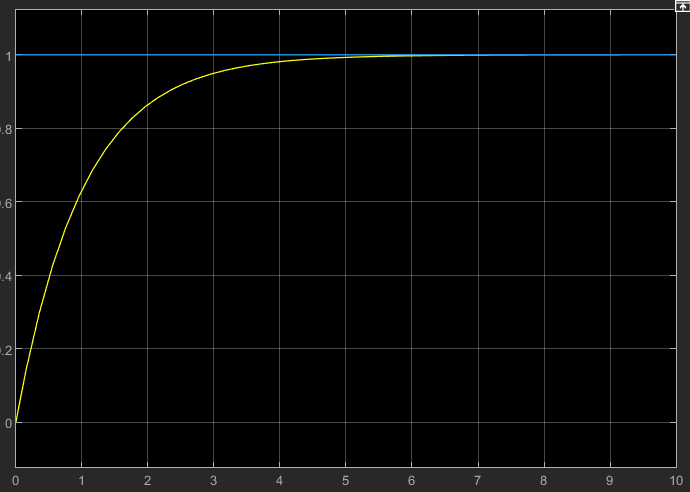
Рис. 9. – вынужденное движение системы.


Рис. 10. – свободное движение системы при выключенном step.


Рис. 11. – свободное движение системы при включенном step.
Эксперимент 3
Рис. 8. – входной сигнал с блока step.


Рис. 9. – вынужденное движение системы.
Ненулевое значение второго интегратора:


Рис. 10. – свободное движение системы при выключенном step.

Рис. 11. – свободное движение системы при включенном step.
Ненулевое значение первого интегратора:

Рис. 12. – свободное движение системы при выключенном step.

Рис. 13. – свободное движение системы при включенном step.
Ненулевое значение для двух интеграторах:

Рис. 14. – свободное движение системы при выключенном step.

Рис. 15. – свободное движение системы при включенном step.
Задание 3

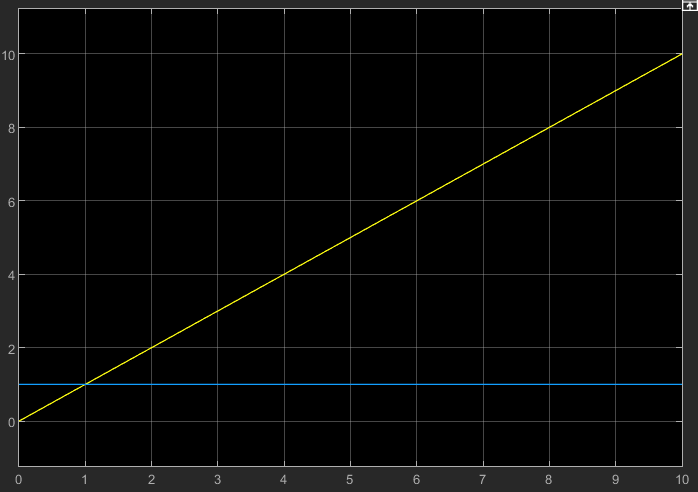
Рис. 16.
–
 .
.


Рис. 17.
– .
.


Рис. 18.
– .
.
Задание 4


Рис. 18. – система.

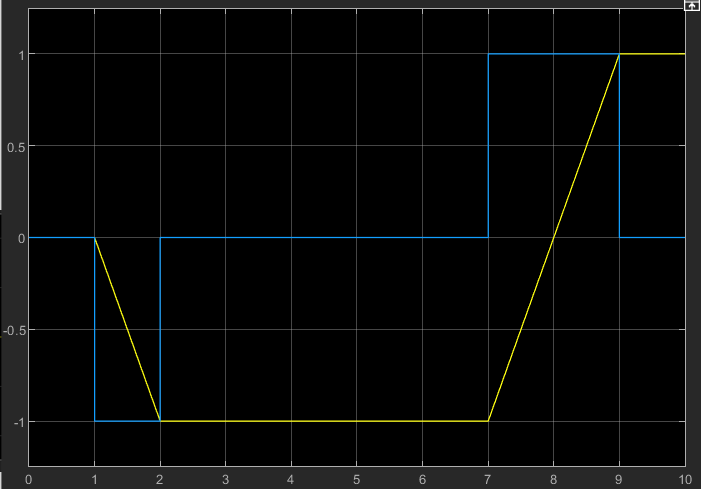
Рис. 19. – реакция системы на Integrator.
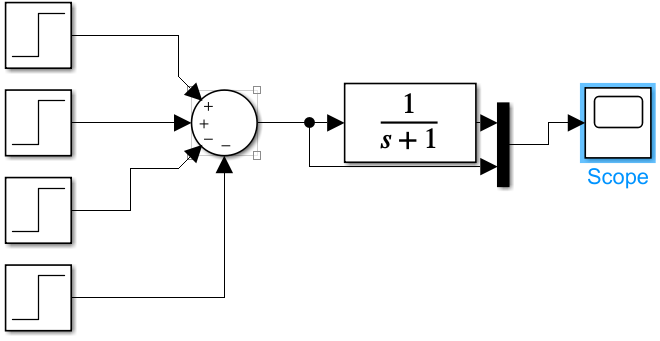

Рис. 20. – реакция системы на Transfer Fcn.
Вывод: сформировали практические навыки по нахождению временных характеристик линейных систем управления, а также освоили технологии нахождения временных характеристик линейных систем управления экспериментальным методом и согласно формул, в случае задания системы с использованием передаточных функций. Закрепили полученные знания на практике.