

Спец.машины / Лекции / Лекц15
.PDFХарактеристики асинхронного исполнительного двигателя при разных способах управления
U y ,U в Свойства и поведение асинхронного исполнительного двигателя
определяются механическими и регулировочными характеристиками.
В общем случае напряжения и образуют несимметричную систему векторов
(рис.1.5).
Рис. 1.5.
Используя понятие эффективного коэффициента сигнала, можно записать
|
|
|
|
|
|
|
j |
|
|
|
|
|
|
U у |
эUв e |
|
|
|
|
U U jU |
2 U |
2 e |
|
j |
|||||
|
|
|
|
|
|
|
|
j |
|
|
у1 |
|
у |
в |
|
в |
э |
|
|
U U jU 2 U |
2 e |
|
j |
||||||
|
|
|
|
|
|
|
|
j |
|
|
у 2 |
|
у |
в |
|
в |
э |
|
|
Симметричные составляющие напряжения управления будут:
Переходя от показательных функций к тригонометрическим и учитывая, что e j cosb j sin b , подставим полученные значения U у1 и U у 2 в (1.1)
|
I |
|
U |
2r |
1 |
|
cos j 1 sin |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
у1 |
|
в |
|
p |
|
|
|
э |
|
|
э |
|
I |
|
U |
2r |
1 |
|
cos j 1 |
|
sin |
(16.2) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
у 2 |
|
в |
|
p |
|
|
э |
|
|
|
э |
|
|
Электромагнитная мощность с точки зрения передачи энергии со статора на ротор представляет собой сумму электромагнитных мощностей прямой и обратной последовательностей. При круговом поле они равны потерям в роторе, деленным на скольжения /в нашем случае на 1 n и 1 n /
Pэм Pэм1 Pэм 2 2I у21rp  1 2I у22 rp
1 2I у22 rp  1
1
Так как по отношению к полю прямой последовательности машина работает в режиме двигателя, а по отношению к полю обратной последовательности в режиме электромагнитного тормоза, то результирующий момент М равен

M M |
|
M |
|
|
P |
|
|
|
|
P |
|
|
2I у21rp |
1 |
2I у22 rp |
1 |
|
|||||||
|
|
|
эм1 |
|
эм2 |
|
|
|
|
|
|
|
||||||||||||
1 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
1 |
|
|
|
2 |
|
|
1 |
|
|
|
|
2 |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Подставим в это уравнение квадраты модулей токов I у1 |
и I у1 из (1.2). После |
|||||||||||||||||||||||
преобразований, получим: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
M |
|
|
U 2 |
|
2 |
|
sin |
1 2 |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
в |
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
э |
|
|
|
|
|||||||||||
|
|
|
|
|
|
1rр |
|
|
|
|
|
|
|
|
э |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
M |
б M п |
|
U 2 |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
в |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1rр |
|
|
|
|
||||
Выразим момент двигателя в относительных единицах. За базисный возьмем |
||||||||||||||||||||||||
пусковой момент, развиваемый двигателем при круговом поле ( э 1, |
sin 1, |
|||||||||||||||||||||||
n 0 ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Тогда момент в относительных единицах m M M б |
|
|
|
|||||||||||||||||||||
|
|
m |
э |
sin 1 |
2 |
2 |
|
|
|
(16.3) |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
э |
|
|
|
|
|
|
||
Уравнение (1.3) есть аналитическое выражение механических характеристик идеального асинхронного исполнительного двигателя, под
которыми понимают зависимость момента от угловой скорости вращения при постоянном коэффициенте сигнала.
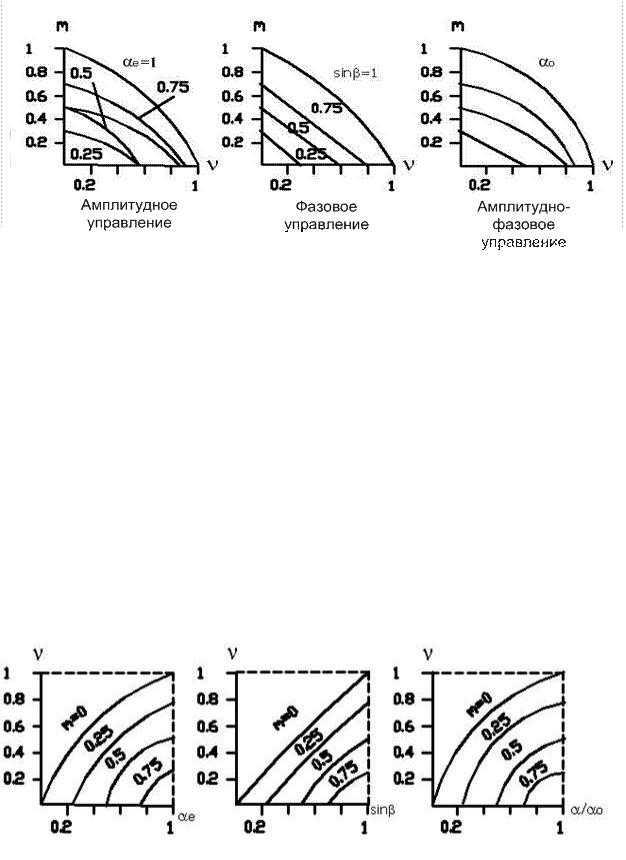
Решив уравнение (1.3) относительно n , получим выражение регулировочных характеристик, которые показывают зависимость угловой скорости вращения от коэффициента сигнала при постоянном моменте на валу
|
2 |
э sin m |
(16.4) |
|
|
1 2 |
|
||
|
|
|
||
|
|
э |
|
|
Рассмотрим механические и регулировочные характеристики а также характеристики мощности при различных способах управления идеальным асинхронным исполнительным двигателем.
1. Механические характеристики ( при
при  ):
):
 –это зависимость вращающего момента от частоты вращения при постоянном сигнале управления.
–это зависимость вращающего момента от частоты вращения при постоянном сигнале управления.
Максимальный момент имеет место при пуске (n=0). С повышением частоты вращения момент уменьшается и при nхх М=0. Максимальный момент и максимальную скорость электродвигатель имеет при коэффициенте сигнала равным 1; при уменьшении a происходит смещение характеристик в сторону уменьшения момента и скорости.
2. Регулировочные характеристики – зависимости частоты вращения от величины или фазы сигнала управления Uу при постоянном моменте сопротивления на валу n = f(aе) или n = f(sinb) при М = const.
амплитудное фазовое амплитудно-фазовое
.Эти характеристики нелинейны при всех способах управления. Наибольшую линейность имеют характеристики при фазовом управлении; наименьшую – при амплитудно-фазовом. Регулировочные характеристики при всех способах управления имеют наиболее линейные участки при малых скоростях. UУТРºМ (моменту сопротивления)
Uутр – напряжение управления трогания – минимальное напряжение, поданное на обмотку управления, при котором ротор двигателя приходит во вращение, В.
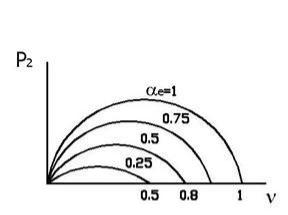
3. Зависимости механической мощности на валу от частоты вращения
Р2=f(n);
Р2=m×n;
р2=Р2/РПУСК.О
За единицу мощности принимают мощность РПУСК.О, потребляемую электродвигателем. Р2=m×n при пуске равна нулю при пуске, когда n=0 и холостом ходе, когда m=0 она достигает максимума при частотах приблизительно равных половине частоты вращения холостого хода
За номинальную механическую мощность обычно принимают максимальную механическую мощность Р2max. Частота вращения, соответствующая этой мощности, считается номинальной.
Способы обеспечения быстродействия
При повышенных частотах питающего напряжения (больших синхронных частотах вращения) ИД с ротором обычной (короткозамкнутой) конструкции изза значительного момента инерции последнего не обладают требуемым быстродействием. В этом случае применяют асинхронные исполнительные двигатели с полым немагнитным ротором (рис. 17.9). Полый немагнитный ротор представляет собой тонкостенный алюминиевый стакан 2, что, с одной стороны, обеспечивает ротору повышенное активное сопротивление, а с другой — весьма небольшой момент инерции.

Двигатель имеет два статора: внешний 1 с обмоткой и внутренний 3 без обмотки, входящий внутрь полого стакана ротора Внутренний статор необходим для уменьшения магнитного сопро тивления основному магнитному потоку.
По сравнению с исполнительными двигателями обычно и конструкции двигатели с полым немагнитным ротором имею! повышенные габариты и невысокий КПД. Это объясняется повышенным зазором между наружным и внутренним статорами, который складывает ся из толщины стенки стакана ротора и двух воздушных зазоров. Как известно, увеличение воздушного зазора способствуем росту намагничивающего тока двигателя и снижению его КПД.
Рис. 17.9. Асинхронный двигатель с полым немагнитным ротором:
1 — внешний статор; 2 — стакан ротора; 3 — внутренний статор; 4— обмотка статора; 5 — вал; 6 — втулка крепления стакана ротора