

Спец.машины / Лекции / Лекц19
.PDFСпособы электромагнитной и электромеханической редукции частоты вращения ротора
Кроме электродвигателей средней и высокой быстроходности в промышленности существует потребность в средствах электропривода малой и сверхмалой быстроходности. Уменьшение частот вращения основных элементов современного электропривода – асинхронных и синхронных электродвигателей – достигается увеличением числа их полюсов и существенным возрастанием габаритов и массы. Поэтому выпускаются специальные электродвигатели совмещенные с механическими редукторами, обеспечивающими заданную редукцию частоты вращения. В электродвигателях малой мощности и систем автоматики применение редукторов приводит к существенному увеличению массы, габаритных размеров, механических составляющих шума и вибрации, а также создает необходимость обслуживания. Поэтому в таких электрических машинах редукция частоты вращения осуществляется на основе нетрадиционных технических решений активной и конструктивной части и двух способов – использования зубцовых гармоник магнитного поля в асинхронных и синхронных редукторных двигателях (РД) и использования силы электромагнитного притяжения эксцентрично установленного ротора к статору в синхронных РД с катящимся и гибким волновым ротором.
Рабочий процесс РД с зубцовой электромагнитной редукцией анализируется на основе метода удельной проводимости зазора, согласно которому МДС, например m 3 -фазного статора и короткозамкнутого ротора определяются выражениями:
|
|
|
|
Fs ( , t) |
Fsm cos( 1t ) ; |
|
|
6c 1 |
|
|
|
|
FR ( ,t) FRm cos ( R t) ( 1 R )t , |
|
|
1 1 |
|
где FRm |
- амплитуда МДС -й гармоники МП ротора, индуцированной |
|
-й гармоникой МП статора при c 0 ; - угол сдвига между гармониками
МДС статора и ротора одного порядка.
Результирующая индукция МП в зазоре ЭМ определяется выражениями:
B ( , t) FS ( , t) FR ( , t) ( , t) ;
( , t) 0 S ( ) R ( , t) ( , t) ( , t) ,
где ( ,t) - полная проводимость зазора; 0 - постоянная составляющая проводимости зазора; S ( ) - составляющая, обусловленная зубчатостью статора; R ( ,t) - составляющая, обусловленная зубчатостью ротора;
( , t) - составляющая, обусловленная нелинейностью магнитной цепи;
( , t) - составляющая, обусловленная эксцентриситетом и другими
видами несимметрии магнитной цепи.
Зубцовые составляющие проводимости зазора определяются гармониками ZS ( R) K разложения функций зубчатого искажения в ряд Фурье:
|
|
|
KZ S |
|||
S ( ) 1 ZSK cos( |
||||||
|
p |
|||||
K 1 |
|
|
|
|||
KZ |
|
|
||||
|
|
|
||||
R ( , t) 1 ZRK |
cos |
|
|
R |
( |
|
p |
|
|||||
K 1 |
|
|
|
|||
) ;
R t) .
В ЭМ общего назначения, а также специальных, в частности малошумных и информационных ЭМ, применяются меры для снижения факторов возникновения и подавления высших гармоник МП, и все высшие гармоники, за исключением зубцовых, весьма малы. Обмоточные коэффициенты зубцовых гармоник равны обмоточному коэффициенту первой (рабочей) гармоники, поэтому они используются для электромагнитной редукции.
Структура ЭМС
РД усиливает некоторые из зубцовых гармоник МП порядка Z которые определяются числом зубцов статора (ротора) Z S ( R ) пр K 1 и
частотами вращения Z |
и Z : |
|
|
|
|
|
|
|
|
|
|
|
|
|
Z |
S |
|
|
|
Z |
R |
|
|
|
Z K |
( |
|
) 1 |
; Z |
K ( |
|
) 1 |
; |
||
|
p |
p |
|||||||||
|
|
|
|
|
|
|
|
||||
|
|
1 |
; |
|
|
Z R R 1 |
. |
Z |
Z |
|
|||||
|
p Z |
|
|
p Z |
|||
|
|
|
|
|
|||
При анализе РД с электромагнитной редукцией всеми высшими гармониками МП пренебрегается и результирующая структура распределения индукции содержит первую гармонику, зубцовые гармоники МП и гармоники их наложения. Основное влияние на рабочий процесс оказывают зубцовые гармоники и гармоники наложения порядка K 1 при 2 p -полюсной МДС статора:
Z |
( |
Z S |
) 1 |
; Z |
( |
Z R |
) 1 |
; Z |
|
Z S Z R |
1. |
|
|
p |
|||||||||
|
|
p |
|
|
p |
|
|
|
|||
Принцип электромагнитной редукции посредством зубцовых гармоник МП объясняется на примере ЭМС трехфазного двухполюсного синхронного реактивного РД (Рис.5).
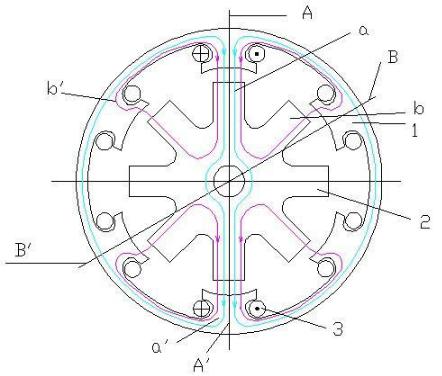
Рис.5 Схема электромагнитной системы двухполюсного редукторного реактивного двигателя: 1-статор; 2-ротор; 3-катушка обмотки статора.
Числа пазов в магнитопроводе ЭМС (Рис.5) определяются выражениями:
Z R ZS 2 p ; Z S 2 pmqS 6 Z R ZS 2 p 8
При положении амплитуды индукции МП статора РД согласно Рис.5 на оси его зубцов AA , являющейся осью положения максимального потокосцепления, размещены зубцы aa ротора. При повороте МП статора в положении оси зубцов BB , то есть на угол S 360 ( Z S , напротив этих
зубцов устанавливаются под действием синхронного реактивного момента,
зубцы bb ротора). При этом ротор РД |
|
поворачивается на угол ZR с |
||||||||||
редукцией, определяемой соотношением 1 |
и частоты вращения ротора R : |
|||||||||||
ZR |
|
360 |
|
360 |
; |
|
||||||
|
|
|
|
|
|
|||||||
|
|
|
|
Z S |
|
Z R |
|
|||||
K p |
1 |
|
|
ZS |
|
|
Z R |
, |
||||
R |
|
|
|
|
||||||||
|
|
|
ZR |
|
Z R Z S |
|||||||
где K p - коэффициент редукции частоты вращения, достигающий при
относительно малых размерах РД нескольких десятков.
В РД, работающих с использованием силы электромагнитного притяжения эксцентрично расположенного ротора к статору, указанная сила усиливается созданием несимметричного относительно тангенциальной координаты, распределения вращающегося МП и обеспечивает двойное вращение системы подвижных элементов относительно центра активной
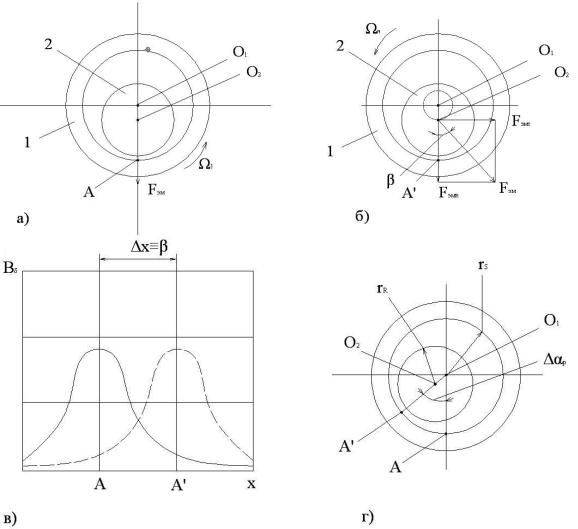
поверхности статора O1 и центра активной поверхности ротора O2 (Рис.5, а и б). Поэтому необходимым элементом конструктивной части являются кинематические пары и соединения, например, карданные, или специальные подшипники, обеспечивающие передачу редуцированного вращения приводу. Распределение МП (Рис.5,в) создается наложением на симметричное вращающееся МП статора постоянного МП обмотки униполярного возбуждения постоянным током или совмещением в магнитной цепи двух вращающихся МП обмоток статора с 2 p 2 и 2 p 4 . Такие двигатели также называются РД с электромеханической редукцией частоты вращения, их принцип действия поясняется Рис.6.
Рис.6. Положения векторов электромагнитных сил (а и б) в схеме электромагнитной системы, распределение индукции в рабочем зазоре (в) и положение угла обратного поворота ротора: 1-статор; 2-ротор.
В соответствии с (Рис.6, а) максимум несимметричного МП статора и сила электромагнитного притяжения Fýì расположены в точке A
минимального зазора. При повороте МП на угол вектор силы Fýì также поворачивается на угол в положение точки A (Рис.6, б и в). При этом создаются нормальная (радиальная) FýìR и тангенциальная Fýì составляющие
Fýì . Под действием Fýì , приложенной к «плечу» O1O2 , ротор перемещается с
«обкатыванием» внутренней поверхности статора синхронно с МП частоты1 и вращается своим центром O2 по окружности радиуса O1O2 в направлении, противоположном вращению МП с частотой 2 . При повороте
МП на угол 2 |
радиан точка A |
не доворачивается до точки A на расстояние |
|||||||
разности 2 Z S |
и 2 Z R , что соответствуют повороту ротора в направлении, |
||||||||
обратном 1 на угол p , определяющий соотношение 1 и R : |
|||||||||
|
|
|
p |
2 Z S Z R ; |
|||||
|
|
|
|
|
Z R |
|
|
||
|
|
|
|
|
|
|
|
||
|
K p |
R |
2 |
|
|
Z R |
. |
||
|
p |
Z S |
|
||||||
|
|
1 |
|
|
Z R |
||||
Так как Z S |
Z R << Z R , обеспечивается значительное уменьшение частоты |
||||||||
R относительно 1 . |
|
|
|
|
|
|
|
|
|
Электродвигатели с зубцовой редукцией частоты вращения
Малооборотные двигатели с электромагнитной редукцией могут функционировать в асинхронном и в синхронном (субсинхронном) режимах.
Асинхронный режим РД обеспечивается размещением в статоре двух m - фазных обмоток – возбуждения и генераторной с числами пар полюсов p1 и p2 . Соотношение p1 и p2 выбирается в соответствии с одним из двух соотношений, исключающих электромагнитную связь статорних обмоток по первым гармоникам:
p1 2Kp2 ;
p2 2Kp1 ;
K 1 .
Генераторная обмотка замыкается на нагрузку, улучшение характеристик асинхронного РД, который также называется индукторным, достигается использованием емкостного нагрузочного сопротивления.
При отсутствии насыщения магнитной цепи, точном изготовлении электромагнитной системы и использовании в статоре распределенных синусных обмоток, а также магнитных клиньев, структура МП возбуждения создается распределением МДС обмотки p1 близким к синусоидальному и при практически незначительном влиянии зубцовых гармоник проводимости статора:
Fp1 Fp1m cos( 1t) ;
p1 ;
S ( ) 1.
Электромагнитная связь обмоток p1 и p2 осуществляется через зубчатый ротор без обмотки с определенным соотношением Z R и Z S и
специальной геометрией зубцово-пазовой зоны. Активная зубчатая поверхность ротора обеспечивает незначительные амплитуды роторних
зубцовых гармоник порядка K 1 и усиливает гармонику порядка K 1 .
Поэтому зубцовая роторная составляющая, суммарная проводимость зазора |
||||||||||||||||||||||||||||||
МП зазора определяются выражениями: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
R ( , t) 1 ZR1 cos Z R ( p t) ; |
|
|
|
|
|
|
||||||||||||||||||||||
|
|
( , t) 0 1 ZR1 cos Z R ( p t) ; |
|
|
|
|
|
|
||||||||||||||||||||||
B ( , t) Fp1 ( , t) ( , t) Bp1 ( , t)BZR1 ( , t) BZR2 ( , t) , |
|
|
|
|||||||||||||||||||||||||||
где 0 - угол между осью зубца |
|
|
ротора |
|
|
и |
осью, |
соответствующей |
||||||||||||||||||||||
положению максимума МДС |
Fp ; Bp |
|
( , t), BZR ( , t), BZR |
( , t) |
- |
составляющие |
||||||||||||||||||||||||
|
|
|
|
1 |
|
|
|
1 |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
МП, обусловленные |
соответственно |
|
рабочей |
|
|
гармоникой |
МДС |
Fp |
и |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
роторной зубцовой проводимостью зазора. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
Составляющие |
BZR ( , t), BZR |
( , t) |
|
характеризуются числом периодов по |
||||||||||||||||||||||||||
|
|
1 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
окружности соответственно |
ZR p1 |
|
|
и |
|
|
ZR p1 |
и вращаются против и в |
||||||||||||||||||||||
направлении гармоники B p ( , t) |
при Z |
R |
|
R |
|
|
. Они могут взаимодействовать |
|||||||||||||||||||||||
|
|
1 |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
с генераторной обмоткой статора, |
|
|
если |
|
|
p2 |
|
ZR p1 . |
Выбирается, |
по |
||||||||||||||||||||
технологическим |
|
соображениям, |
|
|
|
|
|
соотношение |
|
|
p2 ZR p1 . |
|||||||||||||||||||
Электромагнитный |
вращающий |
|
|
момент |
|
|
при |
ZR p1 p2 |
создается |
|||||||||||||||||||||
гармоникой BZR ( , t) и ротор вращается в направлении гармоники |
B p ( , t) с |
|||||||||||||||||||||||||||||
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
коэффициентом редукции. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
K p |
1 |
|
|
|
|
1 |
|
|
|
|
. |
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
(1 2K ) p1 |
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
Z R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Угловая частота ЭДС и тока генераторной обмотки |
2 в диапазоне |
|||||||||||||||||||||||||||||
вращения от 0 до |
1 |
изменяется от |
|
|
|
до 0, |
величина |
|
2 |
и скольжение |
||||||||||||||||||||
|
Z R |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
асинхронного РД определяются соотношениями: |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
2 1 ZR R ; |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
( |
|
|
) R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
SZ |
|
|
Z R |
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
Z R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Асинхронный РД регулируется |
|
|
изменением нагрузочного емкостного |
|||||||||||||||||||||||||||
сопротивления, коэффициент |
редукции |
|
|
повышается |
увеличением |
Z R |
при |
|||||||||||||||||||||||
выполнении на основных (образующих обмоточные пазы) зубцах статора дополнительных зубцов.
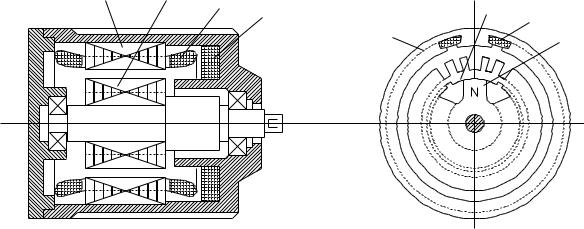
Субсинхронные РД содержат статор и ротор с явновыраженной двухсторонней зубчатостью и выполняются с осевым (Рис.7, а) и радиальным (Рис.7, б) возбуждением.
|
1 |
2 |
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
2 |
|
|
|
4 |
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
1 |
5 |
|
|
|
|
|
|
à) |
|
|
|
|
á) |
Рис.7 Конструктивные схемы электромагнитных систем синхронных РД с осевым униполярным (а) и радиальным магнитоэлектрическим (б) возбуждением:
1-статор; 2-ротор; 3-обмотка статора переменного тока; 4-обмотка униполярного возбуждения постоянным током; 5-постоянный магнит.
Двухсторонняя зубчатость выбирается исходя из условия выбора геометрических соотношений зубцовых шлицов bøS ( R ) и шагов tZS ( R ) статора
(ротора), соответственно усиливающих и ослабляющих зубцовые гармоники
порядка K 1 |
и K 1: |
|
|
||
|
|
bøS ( R) |
0,5 ; |
bøS ( R) |
20 . |
|
|
|
|
||
|
|
tZS ( R) |
|
||
В синхронных РД с ЭМС (Рис.7) выражение ( ,t) преобразуется в
четыре слагаемых и проводимость в виде четвертого слагаемого обеспечивает составляющую магнитного поля, которая взаимодействует со статорной обмоткой и образует электромагнитный вращающий момент и редуцированное вращение ротора:
( ,t) Z1 ( ,t) Z 2 ( ,t) Z 3 ( ,t) Z 4 ( ,t) ; |
||||||||
Z 4 |
( ,t) |
0 ZS |
|
ZR |
cos (ZR ZS ) p ZR |
pt |
. |
|
|
1 |
1 |
|
|
|
|||
|
|
|
|
|
2 |
|
|
|
При осевом униполярном возбуждении обмоткой постоянного тока (Рис.5, а) или постоянным магнитом, МДС возбуждения постоянна и возникает переменная зубцовая составляющая МП, взаимодействующая со
статорной обмоткой, если ZR ZS p . |
|
|
При радиальном возбуждении в |
пазах статора дополнительно к m - |
|
фазной обмотке с числом полюсов |
p1 |
располагается вторая обмотка |
постоянного тока с числом полюсов |
p2 |
или ротор содержит постоянные |
магниты (Рис.5, б). Также вторая обмотка может быть |
однофазной и |
|
возбуждаться током частоты |
2 1 . Гармоника |
проводимости, |
обусловленная Z 4 ( , t) , создает две гармоники индукции , каждая из которых может взаимодействовать с МДС m -фазной обмотки с числом
полюсов p1 . Для получения рабочей обмотки с меньшим p целесообразно
выбрать ZR ZS p1 p2 .
Коэффициент редукции и частота вращения ротора синхронных РД (рис.5, а и б) определяются соотношениями:
|
|
|
|
|
K p |
|
ZR |
; R |
1 . |
|
|
|
|
||||||
|
|
|
|
|
|
|
p |
ZR |
|
В синхронном РД двойного питания обмоток с p1 и p2 токами частот 1 |
|||||||||
и 2 |
обеспечивается возможность регулирования частоты вращения ротора |
||||||||
от R |
0 |
до R |
|
2 1 |
. |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
ZR |
|
|
|
|
|
Также существют конструкции синхронних РД, в которых обмотка p2 отсутствует или замкнута на выпрямитель. Такие ЭМ называются РД, реактивними РД и РД с самовозбуждением. Для них коэффициент редукции и частоты вращения ротора определяются соотношениями;
K p |
ZR |
; R |
|
2 1 |
. |
|
|||||
|
|
||||
|
2 p |
|
|
ZR |
|
Электродвигатели с катящимся и волновым ротором
ДВИГАТЕЛИ С КАТЯЩИМСЯ РОТОРОМ
Принципиальной особенностью двигателей с катящимся ротором (ДКР), отличающей их от других машин, является эксцентричное расположение ротора в расточке статора. Вращающий момент здесь создается за счет сил одностороннего магнитного притяжения.
Принцип действия ДКР рассмотрим с помощью рис. 6.7, на котором изображен статор с эксцентрично расположенным ротором. Допустим, что обмотка статора создает несимметричное магнитное поле, максимум которого в данный момент приходится на т.А. Несимметричное поле создает силу одностороннего магнитного притяжения, под действием которой ротор будет соприкасаться со статором в той же т. А (рис.6.7,а). По мере вращения магнитного поля сила одностороннего притяжения перемещается по расточке статора с синхронной скоростью. В любой момент времени ее можно разложить на составляющие Fx и Fy (рис. 6.7,б). Видно, что Fx , притягивая
ротор к статору, заставляет его катиться по внутреннему диаметру последнего с синхронной скоростью. Ротор же медленно поворачивается вокруг собственного центра, причем в противоположном направлении. (На
рис. 6.7. поле статора повернулось на 45 против часовой стрелки, а точка p , принадлежащая телу ротора, повернулась по часовой стрелке на угол jP ,
который заметно меньше 45 ). Это вращение и является выходным.
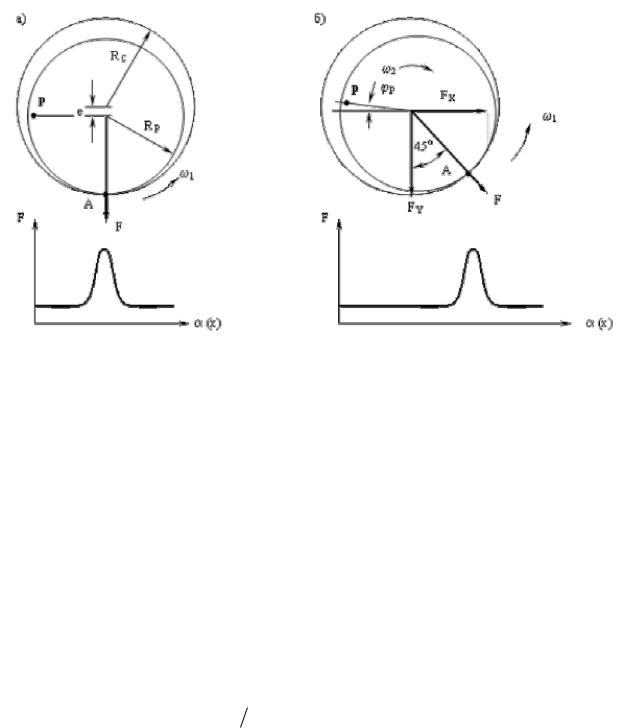
Рис. 6.7. К вопросу о принципе действия ДКР |
|
В конечном итоге при повороте поля статора на один оборот jc |
2 p |
ротор повернется на угол, равный разности длин окружностей статора и ротора, деленной на радиус ротора Rp :
|
|
|
2 Rc 2 Rp |
|
2 |
Rc Rp |
. |
|||||||
p |
|
|
|
|
|
|||||||||
|
|
|
|
Rp |
|
|
|
|
|
|
|
Rp |
||
|
|
|
|
|
|
|
|
|
|
|
|
|||
Переходя к частоте вращения и учитывая, что 1 2 p , получим |
||||||||||||||
|
|
|
2 |
1 |
Rc Rp |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
Rp |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
||||
Так как в ДКР Rc Rp |
Rp 1, то |
|
2 существенно меньше |
|||||||||||
коэффициент редукции здесь весьма значительный: |
||||||||||||||
|
|
|
|
|
|
|
|
|
Rp |
|
|
|||
|
|
k |
ред |
1 |
|
|
|
|
|
. |
|
|||
|
|
2 |
Rс |
|
Rp |
|
||||||||
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|||||
(6.14)
1 , т.е.
(6.15)
В ДКР различают два момента: электромагнитный момент M эм ,
вызывающий вращение центра ротора вокруг центра статора со скоростью n1
M эм Fx c |
(6.16) |
и момент M 2 , приложенный к ротору и вызывающий медленное вращение ротора вокруг собственного центра со скоростью n2 .
M 2 FT Rp |
(6.17) |
где FT – сила, возникающая в точке касания ротора о статор, равная по значению Fx и противоположно ей направленная.
Выражение M эм зависит от типа двигателя, электромагнитных нагрузок и способа питания. Для большинства из них
M эм M max sin , |
(6.18) |
где: M max – максимальное значение вращающего момента, зависящее от значений магнитного потока статора и эксцентриситета; g – угол между
вектором НС статора и продольной осью ротора, под которой понимают линию, проходящую через центр ротора и точку касания ротора и статора.
Двигатели с катящимся ротором могут работать в синхронном и асинхронном режимах. Определяется это соотношением силы трения FT в
точке касания и составляющей FX . Если |
FT FX , проскальзывание |
невозможно и ДКР работает в синхронном режиме. В противном случае ротор вращается с проскальзыванием и машина переходит в асинхронный режим.
Несимметричное вращающееся магнитное поле может быть получено различными способами, например, наложением униполярного поля, созданного тороидальной обмоткой постоянного тока, на двухполюсное симметричное вращающееся поле обмотки переменного тока (рис. 6.8, а), или наложением вращающегося двухполюсного поля на вращающееся же четырехполюсное поле (рис. 6.8,б). Этот способ основан на том, что сила одностороннего магнитного притяжения пропорциональна квадрату
нормальной составляющей индукции: f ~ Bn2 . В ряде современных ДКР
несимметричное поле создают с помощью специальных схем обмоток и электронных схем питания их.
В настоящее время существует большое количество исполнений ДКР, весьма разнообразных по роду тока, по характеру изменения скорости, по форме обкатываемых поверхностей, по назначению и т.д.