

5.3 Построение лачх корректирующего звена
ЛАЧХ последовательного непрерывного корректирующего звена строим путем графического вычитания из ЛАЧХ желаемой ЛАЧХ заданной части системы. (Приложение А)
Или же по передаточной функции корректирующего звена, которую можно по формуле 5.2.
 . (5.2)
. (5.2)
Для этого воспользуемся скриптом:
Рисунок 5.1 – Скрипт на языке MatLab для нахождения ПФ корректирующего звена

Рисунок 5.2 – Результат выполнения скрипта
На рисунке 5.2 показан расчет передаточной функции корректирующего звена.
5.4 Построение лачх средствами matlab
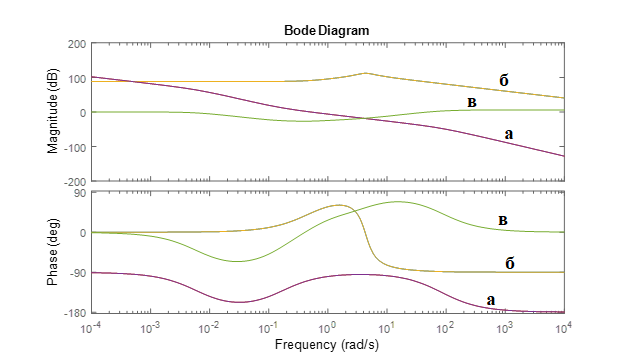
Рисунок 5.3 – ЛАЧХ: а) – ЛАЧХ и ФЧХ желаемой системы; б) – ЛАЧХ и ФЧХ заданной системы; в) – ЛАЧХ И ФЧХ корректирующего звена.
Из рисунка 5.4 видно, что скорректированная система удовлетворяет заданным показателям качества.
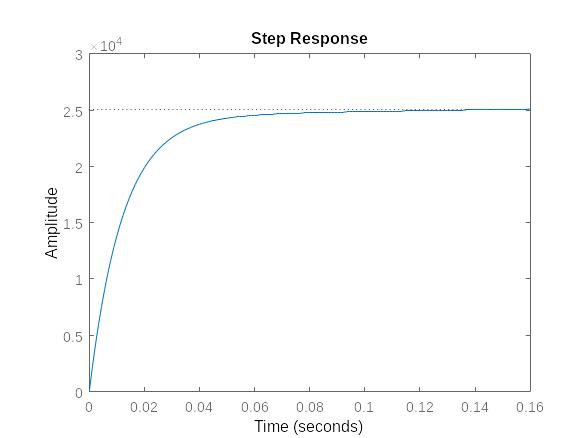
Рисунок 5.4 – Переходная характеристика системы
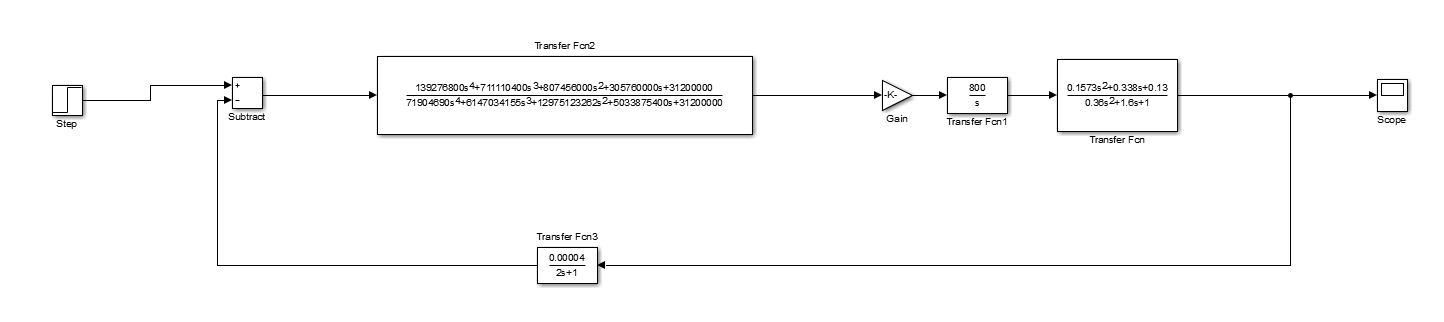
Рисунок 5.5 – Структурная схема скорректированной системы
6 Оценка качества скоректированной системы
Перед тем как смоделировать САУ рассчитаем позиционную ошибку, скоростную ошибку и ошибку по ускорению скорректированной системы и сравним их с заданной системой.
Для того, чтобы найти ошибки системы необходимо составить передаточную функцию системы относительно ошибки.
Для заданной системы:

 (6.1)
(6.1)
 (6.2)
(6.2)
 (6.3)
(6.3)
Формулы (6.1) – (6.3) используются для расчёта позиционной, скоростной и ошибки по ускорению для системы. [2]
Для нахождения передаточной функции относительно ошибки для скорректированной системой воспользуемся следующим скриптом:
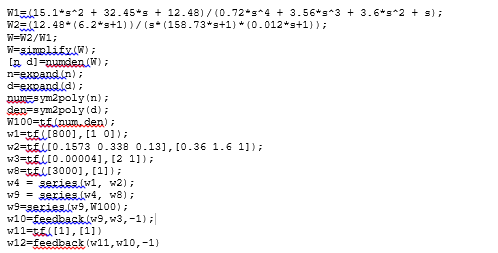
Рисунок 6.1 – Скрипт на языке MatLab для нахождения ПФ

Рисунок 6.2 – Результат выполнения скрипта
На рисунке 6.2 показана передаточная функция относительно ошибки для скорректированной системы.
Таблица 6.1 – Ошибки для скорректированной и заданной системы
Система |
С1 |
С2 |
С3 |
Заданная |
0.00004 |
0.082 |
0.73 |
Скорректированная |
0.00004 |
0.035 |
0.16 |
Как видно из таблицы 6.1 скоростная ошибка и ошибка по ускорению уменьшились в скорректированной системе.
Так же сравним переходные характеристики заданной и скорректированной системы.
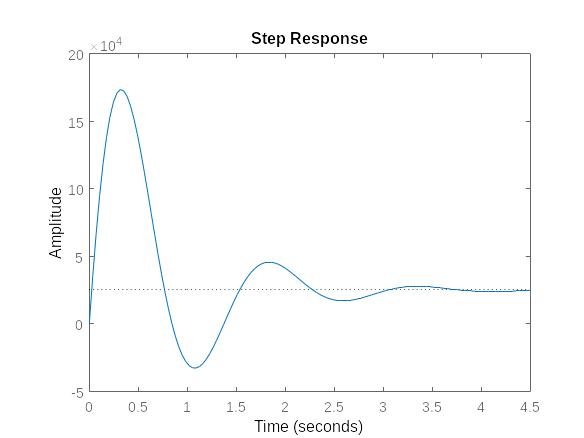
Рисунок 6.3 – Переходная характеристика заданной системы
Рисунок 6.4 – Переходная характеристика скорректированной системы
Из рисунков 6.3 и 6.4 видно, что переходная характеристика скорректированной системы значительно лучше, чем заданной, так как время регулирования и перерегулирование уменьшилось.
По полученной переходной характеристике определим прямые показатели качества:
 – время
регулирования, время в течении, которого
отклонение выходной величины от
установившегося значения становится
меньше заданной величины ∆. [2]
– время
регулирования, время в течении, которого
отклонение выходной величины от
установившегося значения становится
меньше заданной величины ∆. [2]
 (6.4)
(6.4)
 – перерегулирование,
максимальное отклонение выходной
величины от установившегося значения
по отношению к установившемуся значению:
– перерегулирование,
максимальное отклонение выходной
величины от установившегося значения
по отношению к установившемуся значению:
 (6.5)
(6.5)
Таблица 6.2 – Сравнение времени регулирования и перерегулирования
Система |
|
|
Заданная |
3.3 |
600 |
Скорректированная |
0,08 |
0.01 |
Из таблицы 6.2 видно, что время регулирования и перерегулирование скорректированной системы значительно лучше, чем заданной. [2]
Так же сравним запас по амплитуде и по фазе, заданной (рис 6.4) и скорректированной системы (рис 6.5).
Рисунок 6.4 – ЛАЧХ И ФЧХ заданной системы
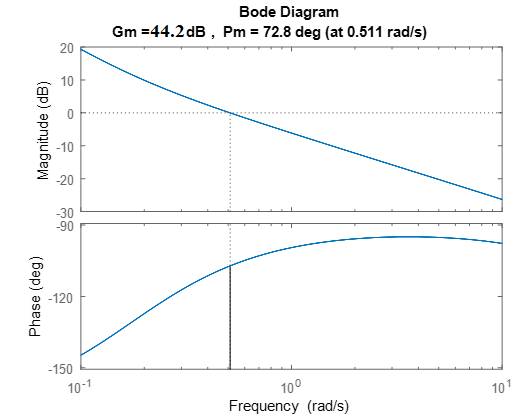
Рисунок 6.5 – ЛАЧХ И ФЧХ скорректированной системы
Таблица 6.3 – Сравнение запаса по фазе и амплитуде
Система |
По амплитуде |
|
Заданная |
32.3 |
30.7 |
Скорректированная |
44.2 |
72.8 |

Из таблицы 6.3 и рисунков 6.4 и 6.5 видно, что запас по амплитуде и по фазе в скорректированной системе значительно больше.
Так же оценим такие показатели качества как степень устойчивости и колебательность.
Степень устойчивости определяется как расстояние от мнимой оси к ближайшему корню характеристического уравнения системы. [2]
Колебательность определяется как максимальное отношение мнимой части корня характеристического уравнения к действительной. [2]
Таблица 6.4 – Сравнение степени устойчивости и колебательности
Система |
Степень устойчивости |
|
Заданная |
0 |
2.1 |
Скорректированная |
0.2479 |
1.8653 |

ВЫВОДЫ
В курсовом проекте выполнялся синтез линейной непрерывной системы управления, моделирование переходных процессов в ней и корректировка системы.
В качестве метода для синтеза корректирующего звена был выбран частотный метод синтеза (по ЛАЧХ) и по нему была найдена передаточная функция последовательного корректирующего звена, после чего была проведена сравнительная оценка качества заданной системы и скорректированной системы. Результаты сравнения показали, что скорректированная система значительно лучше. Результаты сравнения описаны в пункте 6.
Кроме этого был проведен расчёт передаточных функции из заданных уравнений описывающих элементы системы, составлена структурная схема САУ, а также оценена устойчивость заданной системы.
Так как коэффициент усиления заданной системы не задавался, то с помощью метода D-разбиения по одному параметру его выбрали из области устойчивости D-разбиения.
Исходя из вышенаписанного была спроектирована САУ, которая удовлетворяет заданным требованиям качества.