

Знаходження оптимального плану роботи флоту і оптимальних схем руху суден
Перенумеруем змінні, щоб вони були одноіндексними (табл. 3.1)
Таблиця 3.1. Перехід від двухіндексной до одноіндексной нумерації змінних
x11 |
x12 |
x13 |
x14 |
x21 |
x22 |
x23 |
x24 |
х31 |
х32 |
x33 |
x34 |
Знак |
Праві частини обмежень |
x1 |
x2 |
x3 |
x4 |
x5 |
x6 |
x7 |
x8 |
x9 |
x10 |
x11 |
x12 |
||
10 |
10 |
|
|
7 |
7 |
|
|
3 |
3 |
|
|
≤ |
800 |
|
11 |
|
11 |
|
6 |
|
6 |
|
4 |
|
4 |
≤ |
650 |
|
|
11 |
11 |
|
|
7 |
7 |
|
|
4 |
4 |
≤ |
700 |
10 |
|
10 |
|
6 |
|
6 |
|
3 |
|
3 |
|
≤ |
600 |
62 |
61 |
54 |
61 |
|
|
|
|
|
|
|
|
= |
2190 |
|
|
|
|
57 |
55 |
49 |
57 |
|
|
|
|
= |
1460 |
|
|
|
|
|
|
|
|
59 |
54 |
51 |
58 |
= |
1825 |
420 |
501,2 |
434,7 |
515,9 |
274,4 |
308 |
269,5 |
303,1 |
126 |
168 |
145,6 |
187,6 |
→ |
max |
Запишемо математичну модель в координатної формі з використанням конкретних числових даних:
Цільова функція:
Z=420*x1+501,2*x2+434,7*x3+515,9*x4+274,4*x5+308*x6+269,5*x7+303,1*x8+126*
*x9+ 168* x10+ 145,6* x11+187,6*x12+0*x13+0*x14+0*x15+0*x16 – max (4)
Обмеження:
10* x1 +10* x2+7* x5+7* x6+3* x9+3* x10 800;
11* x2+11* x4+6* x6+6* x8+4* x10+4* x12 650;
11* x3+11* x4+7*x7 +7*x8 +4*x11 +4*x12 700;
10* x1+ 10* x3 +6* x5 +6* x7 +3* x9 +3* x11 600;
62* x1 +61 * x2+ 54 * x3+61* x4=2190
57* x5 +55 * x6+ 49 * x7+57*x8=1460
59* x9 +54 * x10+ 51 * x11+58*x12=1825
xij 0 ( і = 1,3 ; j = 1,4).
Перейдемо від завдання в стандартній формі до завдання в канонічній формі (перетворимо нерівності в рівняння за допомогою додаткових змінних):
Цільова функція:
Z=420*x1+501,2*x2+434,7*x3+515,9*x4+274,4*x5+308*x6+269,5*x7+303,1*x8+126*
*x9+ 168* x10+ 145,6* x11+187,6*x12+0*x13+0*x14+0*x15+0*x16 – max
Обмеження:
10* x1 +10* x2+7* x5+7* x6+3* x9+3* x10 + x13=800;
11* x2+11* x4+6* x6+6* x8+4* x10+4* x12 + x14 = 650;
11* x3+11* x4+7*x7 +7*x8 +4*x11 +4*x12 + x15= 700;
10* x1+ 10* x3 +6* x5 +6* x7 +3* x9 +3* x11+ x16 = 600;
62* x1 +61 * x2+ 54 * x3+61* x4=2190
57* x5 +55 * x6+ 49 * x7+57*x8=1460
59* x9 +54 * x10+ 51 * x11+58*x12=1825
xij 0 ( і = 1,3 ; j = 1,4).
Позначаємо вектори умов :
А1= А2=
А2=
 А3=
А3=
 А4=
А4=
 А5=
А5=
 А6=
А6= А7=
А7=
 А8=
А8=
А9=
 А10=
А10= А11=
А11= А12=
А12= А13=
А13= А14=
А14=

Дана система обмежень не містить потрібних для побудови базису (m + n) одиничних векторів - умов. Застосуємо метод штучного базису та перейдемо від початкового завдання до розширеної шляхом введення штучних змінних x17, x18 і x19.
Цільова функція:
Z=420*x1+501,2*x2+434,7*x3+515,9*x4+274,4*x5+308*x6+269,5*x7+303,1*x8+126*
*x9+ 168* x10+ 145,6* x11+187,6*x12+0*x13+0*x14+0*x15+0*x16 –
–М*x17 –М*x18–М*x19 – max
Обмеження:
10* x1 +10* x2+7* x5+7* x6+3* x9+3* x10 + x13=800;
11* x2+11* x4+6* x6+6* x8+4* x10+4* x12 + x14 = 650;
11* x3+11* x4+7*x7 +7*x8 +4*x11 +4*x12 + x15= 700;
10* x1+ 10* x3 +6* x5 +6* x7 +3* x9 +3* x11+ x16 = 600;
62* x1 +61 * x2+ 54 * x3+61* x4+ x17 =2190
57* x5 +55 * x6+ 49 * x7+57*x8+ x18 =1460
59* x9 +54 * x10+ 51 * x11+58*x12+ x19 =1825
xij 0 ( і = 1,3 ; j = 1,4).
Ми отримали 7 одиничних векторів необхідних для побудови базису:
А13=
А14=
 А15=
А15=
 А16=
А16= А17=
А17= А18=
А18= А19=
А19=
Обчислимо значення базисних змінних.
Тоді вихідний опорний план розширеної задачі такий:
X= (x1=0; x2=0; x3=0; x4=0; x5=0; x6=0; x7=0; x8=0; x9=0; x10=0; x11=0; x12=0; x13=800; x14=650; x15=700; x16=600; x17=2190; x18=1460; x19=1825).
Складемо симплекс-таблицю для вихідного опорного плану розширеної задачі (табл.3.2)
Таблиця 3.2 Симплекс-таблиця для вихідного опорного плану
№ |
Базис |
СБ |
В |
420 |
501,2 |
434,7 |
515,9 |
274,4 |
308 |
269,5 |
303,1 |
126 |
168 |
145,6 |
187,6 |
0 |
0 |
0 |
0 |
-М |
-М |
-М |
А1 |
А2 |
А3 |
А4 |
А5 |
А6 |
А7 |
А8 |
А9 |
А10 |
А11 |
А12 |
А13 |
А14 |
А15 |
А16 |
А17 |
А18 |
А19 |
||||
1 |
А13 |
0 |
800 |
10 |
10 |
0 |
0 |
7 |
7 |
0 |
0 |
3 |
3 |
0 |
0 |
1 |
0 |
0 |
0 |
0 |
0 |
0 |
2 |
А14 |
0 |
650 |
0 |
11 |
0 |
11 |
0 |
6 |
0 |
6 |
0 |
4 |
0 |
4 |
0 |
1 |
0 |
0 |
0 |
0 |
0 |
3 |
А15 |
0 |
700 |
0 |
0 |
11 |
11 |
0 |
0 |
7 |
7 |
0 |
0 |
4 |
4 |
0 |
0 |
1 |
0 |
0 |
0 |
0 |
4 |
А16 |
0 |
600 |
10 |
0 |
10 |
0 |
6 |
0 |
6 |
0 |
3 |
0 |
3 |
0 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
5 |
А17 |
-M |
2190 |
62 |
61 |
54 |
61 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
0 |
0 |
6 |
А18 |
-M |
1460 |
0 |
0 |
0 |
0 |
57 |
55 |
49 |
57 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
0 |
7 |
А19 |
-М |
1825 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
59 |
54 |
51 |
58 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
m+1 |
Zj -Cj |
0 |
-420 |
-501,2 |
-434,7 |
-515,9 |
-274,4 |
-308 |
-269,5 |
-303,1 |
-126 |
-168 |
-145,6 |
-187,6 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
|
m+2 |
-5475 |
-62 |
-61 |
-54 |
-61 |
-57 |
-55 |
-49 |
-57 |
-59 |
-54 |
-51 |
-58 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
||
План в табл. 3.2 неоптимальний, тому що є негативні оцінки, а завдання на максимум. Оптимальний план знаходимо за допомогою MS Excel
Excel - це широко поширена комп'ютерна програма. Потрібна вона для проведення розрахунків, складання таблиць і діаграм, обчислення простих і складних функцій. Вона входить до складу пакета Microsoft Office.
Це такий набір програм для роботи в офісі. Найпопулярніші додатки в ньому - Word і Excel.
Excel (Ексель) - це щось на зразок калькулятора з безліччю функцій і можливостей. У цій програмі можна складати звіти, робити обчислення будь-якої складності, складати діаграми. Потрібна вона, в першу чергу, бухгалтерам і економістом.
Цінною можливістю Excel є можливість писати код на основі Visual Basic для додатків. Цей код пишеться з використанням окремого від таблиць редактора. Управління електронною таблицею здійснюється за допомогою об'єктно-орієнтованої моделі коду і даних. За допомогою цього коду дані вхідних таблиць будуть миттєво оброблятися і відображатися в таблицях і діаграмах (графіках). Таблиця стає інтерфейсом коду, дозволяючи легко працювати змінювати його і управляти розрахунками.
Для того щоб вирішити задачу ЛП в табличному процесорі Microsoft Excel необхідно виконати наступні дії:
1. Ввести умову задачі:
a) створити екранну форму для введення умови задачі:
• змінних,
• цільової функції (ЦФ),
• обмежень,
• граничних умов;
b) ввести вихідні дані в екранну форму:
• коефіцієнти ЦФ,
• коефіцієнти при змінних в обмеженнях,
• праві частини обмежень;
c) ввести залежності з математичної моделі в екранну форму:
• формулу для розрахунку ЦФ,
• формули для розрахунку значень лівих частин обмежень;
d) задати ЦФ (у вікні "Пошук рішення"):
• цільову комірку,
• напрямок оптимізації цільової функції;
e) ввести обмеження і граничні умови (у вікні "Пошук рішення"):
• осередки зі значеннями змінних,
• граничні умови для припустимих значень змінних,
• співвідношення між правими і лівими частинами обмежень.
2. Вирішити задачу:
a) встановити параметри рішення задачі (у вікні "Пошук рішення");
b) запустити задачу на рішення (у вікні "Пошук рішення");
c) вибрати формат виведення рішення (у вікні "Результати пошуку рішення").
Ввівши всі обмеження, отримуємо оптимальний план завдання:
Таблиця 3.3. Оптимальний план задачі
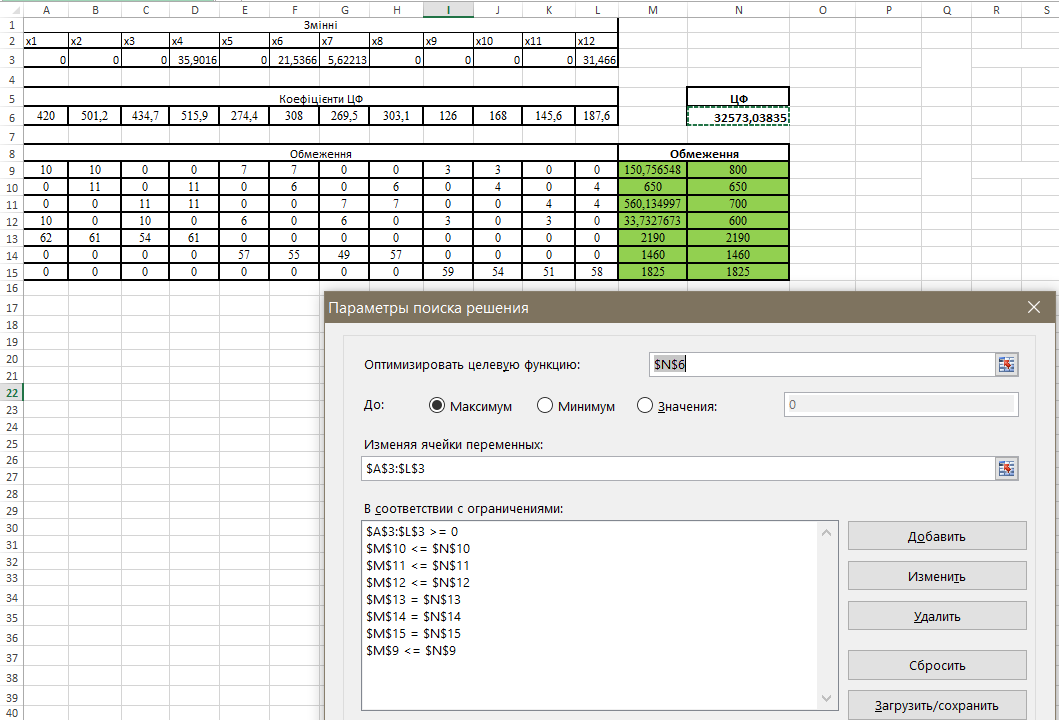
х1 = х11 = 0
х2 = х12 = 0
х3 = х13 = 0
х4 = х14 = 35,902
х5 = х21 = 0
х6 = х22 = 21,537
х7 = х23 = 5,622
х8 = х24 = 0
х9 = х31 = 0
х10 = х32 = 0
х11 = х33 = 0
х12 = х34 = 31,466
Zmax = 32573,04
Економічний сенс отриманих даних:
Х11 = 0 - Судами 1-го типу виконано 0 рейсів по 1й схемою.
Х12 = 0 - Судами 1-го типу виконано 0 рейсів по 2-й схемою.
Х13 = 0 - Судами 1-го типу виконано 0 рейсів по 3-й схемі.
Х14 = 35,9 - Судами 1го типу виконано 36 рейсу по 4-й схемі.
Х21 = 0 - Судами 2го типу виконано 0 рейсів по 1-й схемі.
Х22 = 21,5 - Судами 2-го типу виконано 21 рейсів по 2-й схемою.
Х23 = 5,6 - Судами 2-го типу виконано 6 рейсів по 3-й схемі.
Х24 = 0 - Судами 2-го типу виконано 0 рейсів по 4-й схемі.
Х31 = 0 - Судами 3го типу виконано 0 рейсів по 1-й схемі.
Х32 = 0 - Судами 3-го типу виконано 0 рейси по 2-й схемою.
Х33 = 0 - Судами 3-го типу виконано 0 рейсів по 3-й схемі.
Х34 = 31,5 - Судами 3-го типу виконано 32 рейсів по 4-й схемі.
Zmax = 32573,04- максимальний дохід в інвалюті при роботі судів за схемами.
В результаті рішення задачі отримали оптимальні схеми руху.