

ЛБ / ЛБ6
.pdf
|
|
|
|
|
|
|
|
r |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
arctg |
|
1 75 C |
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
xÏ Ê |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
r |
0 |
|
|
|
|
|
|
r |
|
|
0 |
|
|
|
|
|
|
|
|
|
x |
|
|
x |
|
|
|
1 75 C |
Z |
|
sin |
1 75 C |
|
|
|
|
|
|
||||||||
|
|
Ï Ê |
K |
|
|
|
K |
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
x |
|
|
|
1 |
|
|
x |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
m |
D |
r |
|
|
|
m |
|
|
|
m D |
r |
|
m |
|
|
|
3 |
|
|
||||||
|
|
2 |
|
|
|
|
|
|
|
|
|
|
6.3 10 |
250.756329 80.8 |
|
||||||||||||
|
|
|
i |
|
K |
|
|
|
|
|
|
|
|
i |
K |
|
1 75 C |
|
|
|
|||||||
|
|
|
|
|
1 75 C |
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
1.718 |
|||
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|||||
m |
|
U |
|
m |
D |
x |
U |
|
m |
D |
|
Z |
|
sin |
|
220 6.3 10 |
250.756329 80.8 92.23 |
|
|||||||||
|
|
|
|
|
K |
|
|
|
|
||||||||||||||||||
|
|
1H |
|
|
i |
|
|
K |
|
|
K |
|
1H |
i |
K |
|
|
1 |
|
|
|
|
|
|
|||
Ом,
x |
|
92.23 |
80.8 |
139.261 |
|
ПК |
1.718 |
||||
|
|
|
|||
|
|
|
|
Ом,
arctg |
|
80.8 |
|
0 |
|
139.261 |
|
30.123 |
|
|
|
|
|
,
|
проводим прямую |
HB |
под углом |
по отношению |
окружности токов. Точка |
B |
соответствовать скольжению s |
||
HB |
проходит через точки в которых магнитная мощность |
|||
|
|
|
|
|
равны нулю.
к диаметру
. Прямая и моменты
Определение |
из |
круговой |
диаграммы |
величин, |
характеризующих работу асинхронного двигателя:
OD I |
m |
0.465 |
73.81 |
мм, точка |
||
|
|
3 |
||||
1H |
i |
6.3 |
10 |
|
|
|
|
|
|
|
|
||
соответствует номинальному режиму работы.
D
,
на окружности,
Треугольник
ODH
- треугольник токов.
/ |
HD mi |
41.07 6.3 10 |
3 |
0.259 |
А, |
|
|
||
I2 H |
|
|
|
||||||
/ |
|
58.824 6.3 10 |
3 |
0.371 |
А, |
|
|
||
I0 OH mi |
|
|
|
||||||
I1H |
OD mi |
|
73.81 6.3 10 |
3 |
0.465 |
А; |
|
|
|
|
|
|
|
||||||
DE |
является перпендикуляром к |
оси абсцисс, |
соответственно |
||||||
|
|
|
|
|
|
|
|
|
|
треугольник ODE |
показывает |
активную |
и реактивную |
составляющие |
|||||
номинального тока. |
|
|
|
|
|
|
|
||
Расчет рабочих характеристик асинхронного двигателя:
Для расчета рабочих точек необходимо определить 5 точек на
одинаковом расстоянии между точками |
H |
и |
D |
и шестую точку, |
характеризующую работу двигателя с перегрузкой. |
|
|
||
11
Согласно построенной диаграмме на странице 14 строим рабочие характеристики:
s – скольжение,
P1, P2 – подведённая и активная мощности,
M2 – полезный момент на валу,
cos-
|
-коэффициент мощности, |
|
1 |
||
|
КПД
Таблица 4
|
I1 |
P1 |
P2 |
M2 |
|
cos |
s |
n |
|
|
1 |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Примечание |
|
|
|
|
|
|
|
|
|
|
|
мА |
Вт |
Вт |
Нм |
% |
о.е. |
- |
Об/мин |
|
1 |
371 |
48.048 |
0 |
0 |
0 |
0,25 |
0 |
1000 |
|
2 |
372 |
90.39 |
41.571 |
0.397 |
46 |
0,45 |
0.02 |
980 |
I1H=0,465 A, |
3 |
390 |
133.5 |
78.522 |
0.75 |
58,8 |
0,60 |
0.041 |
959 |
n1=1000 |
4 |
422 |
177.074 |
110.727 |
1.057 |
62,5 |
0,68 |
0.063 |
937 |
об/мин, |
5 |
465 |
220.819 |
137.839 |
1.316 |
62,4 |
0,70 |
0.088 |
912 |
I0/=0,4 A. |
6 |
508 |
258.024 |
156.828 |
1.498 |
60,8 |
0,68 |
0.11 |
890 |
|
Построение рабочих характеристик:
Зависимости строятся как функции от полезной мощности.
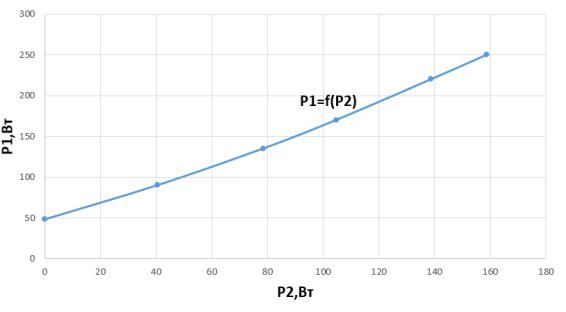
Рис. 2. Зависимость P1=f(P2)
12
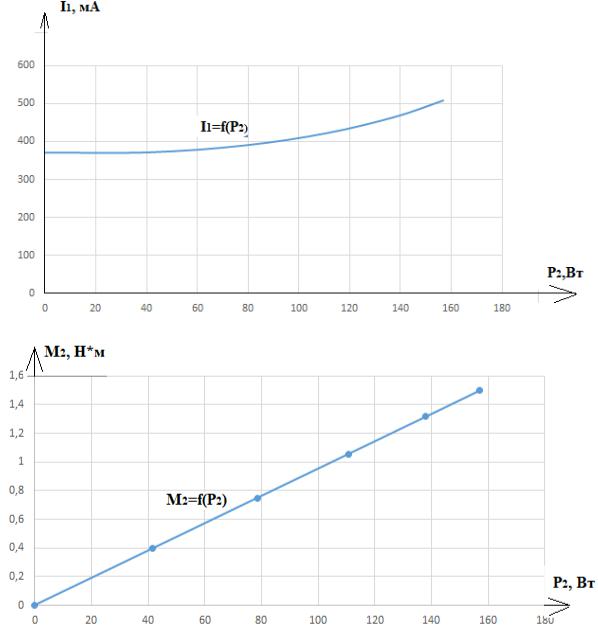
Рис. 3. Зависимость I1=f(P2)
Рис. 4. Зависимость M2=f(P2)
13
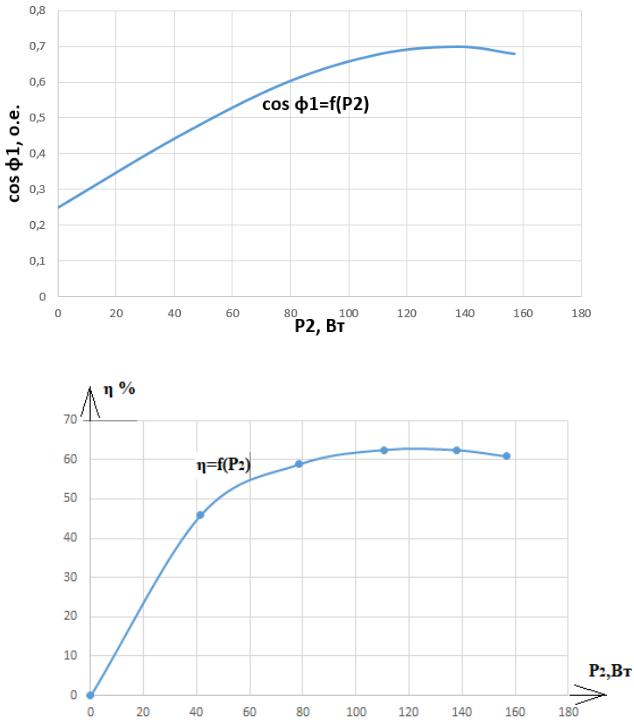
Рис. 5. Зависимость cosφ1=f(P2)
Рис. 6. Зависимость =f(P2)
14
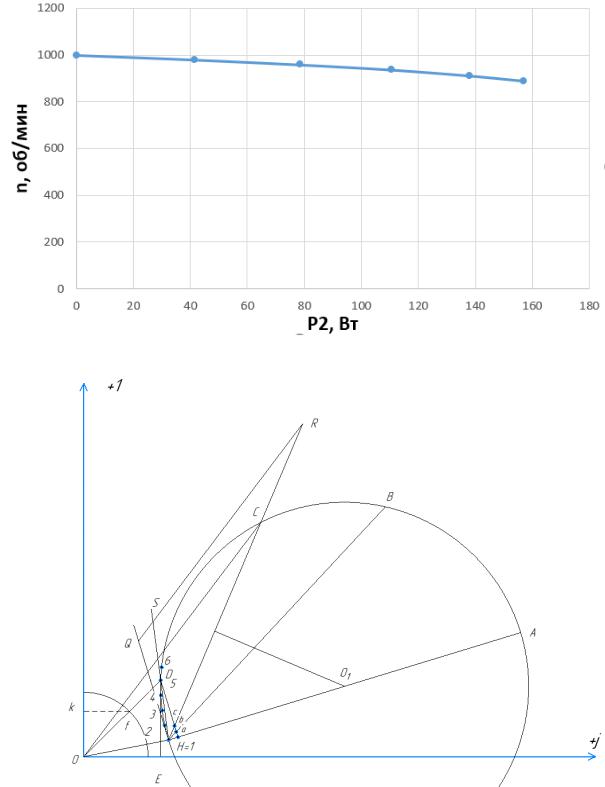
Рис. 7. Зависимость n=f(P2)
Рис. 8. Круговая диаграмма.
15
Анализ результатов Зависимость P1=f(P2).
Исходя из графика видно, что при увеличении P2, изменение величины P1 происходит по линейной зависимости. Но при P2=0, P1 не равен нулю, так как двигатель работает на холостом ходу.
Зависимость I1=f(P2).
Максимальное значение тока статора соответствует режиму холостого хода. Объясняется это тем, что ток холостого хода при любой нагрузке остается практически неизменным, поэтому при малых нагрузках ток статора не велик и является практически реактивным. При увеличении напряжения на валу растет активная составляющая тока.
Зависимость М2 =f(P2).
Если частота вращения ротора постоянна, то кривая представляет прямую линию. Но в асинхронном двигателе частота вращения ротора уменьшается, поэтому поперечный момент на валу, с увеличением нагрузки, увеличивается несколько быстрее P2 и, следовательно, кривая имеет криволинейный вид.
Зависимость cos φ1 = f (P2).
Максимальное значение коэффициента мощности соответствует режиму холостого хода. Объясняется это тем, что ток холостого хода при любой нагрузке остается практически неизменным, поэтому при малых нагрузках ток статора не велик и является практически реактивным. При увеличении напряжения на валу растет коэффициент мощности.
 достигает максимума при нагрузке близкой к номинальной.
достигает максимума при нагрузке близкой к номинальной.
Дальнейшее увеличение напряжения приводит к уменьшению коэффициента мощности за счет увеличения индуктивного сопротивления ротора, которое растет из-за увеличения скольжения.
Зависимость η=f(P2).
16
Зависимость обусловлена тем, что при Х.Х. (Р2=0) КПД равен нулю,
т.к. КПД равен отношению полезной мощности на валу ротора к потребляемой из сети. Эта характеристика имеет обычный для электрических машин и трансформаторов вид.
При малых нагрузках, когда сильно сказываются постоянные потери,
КПД мал. (то есть когда постоянные потери больше переменных потерь).
С ростом нагрузки увеличиваются переменные (тепловые) потери и при равенстве их постоянным потерям коэффициент полезного действия достигает максимума. Асинхронные двигатели конструируют так, чтобы максимальный КПД был при нагрузках несколько меньше P2 ном.
При перегрузке двигателя η снижается за счет превышения переменных потерь над постоянными.
Зависимость n2=f(P2).
По мере увеличения мощности на валу двигателя скольжение растет,
достигая номинального режима, поэтому скоростная характеристика представляет собой кривую слабо наклоненную к оси абсцисс. Изменение частоты вращения ротора при колебании нагрузки увеличивается, так как идет увеличение активного сопротивления ротора и растут электрические потери в роторе.
Заключение: В ходе данной работы были проведены опыты холостого хода и короткого замыкания в асинхронном двигателе с короткозамкнутым ротором. Были построены круговая векторная диаграмма, а также рабочие характеристики данного двигателя.
17
Список использованных источников
1.Копылов И.П. Электрические машины: Учебник-4-е изд., испр.
–М.: Высшая школа, 2009. – 607 с., ил.
2.Вольдек А. И. Электрические машины. Машины переменного тока : учебник для вузов / А. И. Вольдек, В. В. Попов. – СПб.: Питер, 2008.
–349 с.: ил.
3.Игнатович В.М., Ройз Ш.С. Электрические машины и трансформаторы: учебное пособие. - Томск: Изд. ТПУ, 2013.- 147 с.
4.Электромеханические преобразователи энергии и трансформаторы. Лабораторный практикум. / А.И. Верхотуров, В.М.
Игнатович, В.И. Попов, О.Л. Рапопорт, Т.В. Усачева; ТПУ.
18