

Peзульtat pacчeta
-----------------------------------------------------------
I HOMEP I УЗЛOBЫE ПEPEMEЩEHИЯ И ПOBOPOTЫ I
I I--------------------------------------------------I
I УЗЛA I WX I WY I FI I
I I--------------------------------------------------I
---------------------------------------------------------
I 1 I .0000E+00 I .0000E+00 I .0000E+00 I
I 2 I .0000E+00 I -.1851E-06 I -.4558E-05 I
I 3 I .2409E-05 I -.3085E-06 I -.1491E-04 I
I 4 I .1073E-04 I -.1440E-05 I .5771E-04 I
I 5 I .7717E-04 I -.1166E-03 I .1085E-03 I
=========================================================
---------------------------------------------------------
I HOMEP I B H У T P E H H И E У C И Л И Я I
ICTEPЖHЯ I RX I RY I M I
---------------------------------------------------------
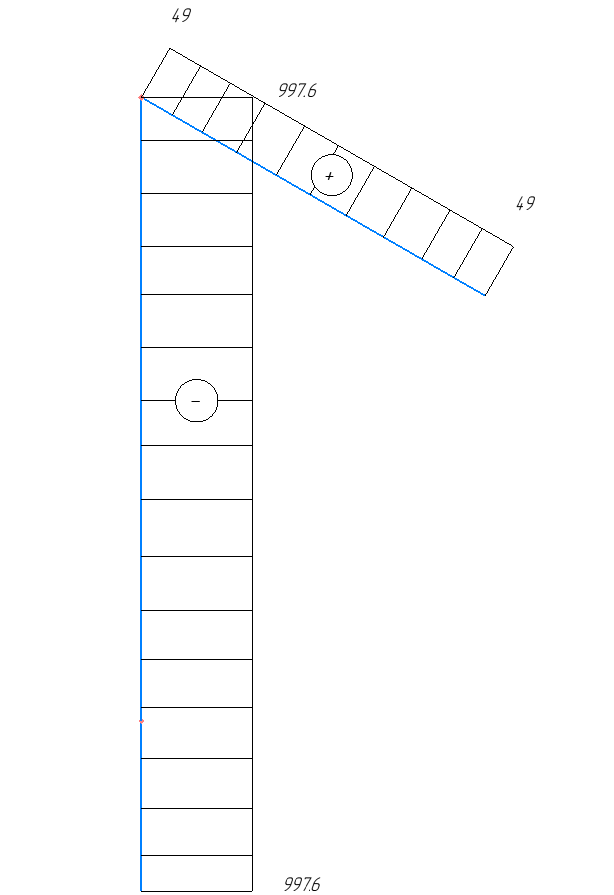
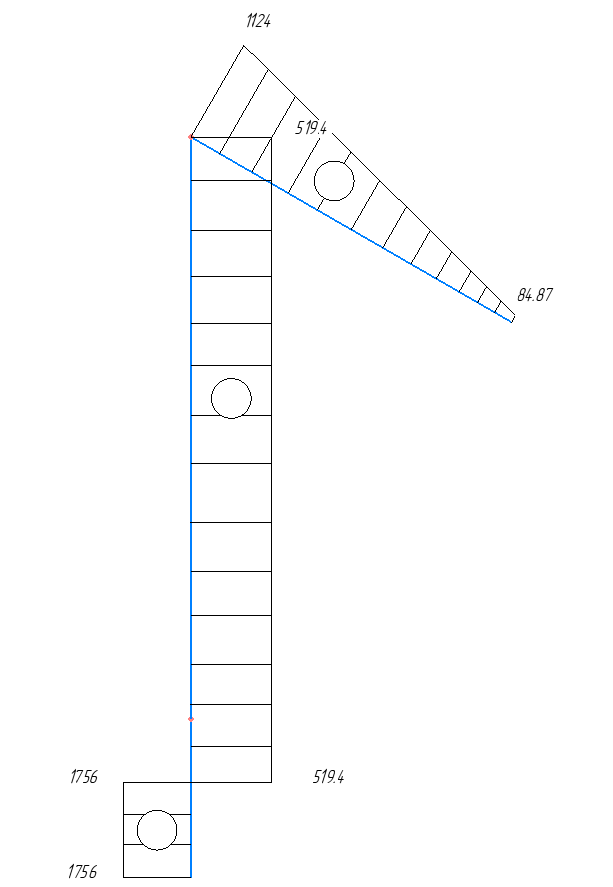
I I -.9976E+03 I .1756E+04 I -.2107E+03 I
I 1 I -.9976E+03 I .1756E+04 I .1053E+03 I
I I -.9976E+03 I .1756E+04 I .4214E+03 I
---------------------------------------------------------
I I -.9976E+03 I -.5194E+03 I .4214E+03 I
I 2 I -.9976E+03 I -.5194E+03 I .3590E+03 I
I I -.9976E+03 I -.5194E+03 I .2967E+03 I
---------------------------------------------------------
I I -.9976E+03 I -.5194E+03 I .2967E+03 I
I 3 I -.9976E+03 I -.5194E+03 I -.2746E+03 I
I I -.9976E+03 I -.5194E+03 I -.8460E+03 I
---------------------------------------------------------
I I .4900E+02 I .1124E+04 I -.8460E+03 I
I 4 I .4900E+02 I .6043E+03 I -.2412E+03 I
I I .4900E+02 I .8487E+02 I -.1876E-03 I
---------------------------------------------------------
=========================================================

2.2. Проверка на прочность и жесткость звеньев манипулятора.
Условие прочности:
Поскольку звенья манипулятора чаще изготовляются из равнопрочного материала – стали, то для оценки прочности материала при плоском нагружении системы используют условие прочности
 ,
,
где
 – максимальное нормальное напряжение
в опасной точке опасного сечения (Па),
N–нормальная
сила в опасном сечении (H),
F–площадь
поперечного сечения (м2),
– максимальное нормальное напряжение
в опасной точке опасного сечения (Па),
N–нормальная
сила в опасном сечении (H),
F–площадь
поперечного сечения (м2),
 – изгибающий момент в опасном сечении
(Н*м),
– изгибающий момент в опасном сечении
(Н*м),
 – момент сопротивления сечения
относительно оси y
(м3),
– момент сопротивления сечения
относительно оси y
(м3),
 – допустимое напряжение (Па).
– допустимое напряжение (Па).
При пространственном нагружении условие прочности для круглого сечения:

 м3
м3
Положением опасного сечения является стык между 3 и 4 звеньями:
N =997.6 Н My = 846 Н·м [σ] = 2·108 Па
 Па.
Па.
Стык между 1 и 2 звеньями брать не будем, т.к. значения максимального Rx совпадают со значениями максимального My.
Определим коэффициент запаса по формуле:
 где
где
 –
предел текучести конструкционной
качественной стали 10
–
предел текучести конструкционной
качественной стали 10
Проверку жесткости манипулятора следует выполнить, сравнив рассчитанный прогиб руки манипулятора с допустимым значением, известным из исходных данных.
Условие жесткости:
 ,
,
где wp–рассчитанные прогиб руки манипулятора (м), [w] – допустимый прогиб (м).
[w] = 4·10-2 м
 условие
жёсткости выполняется
условие
жёсткости выполняется
 условие
жёсткости выполняется
условие
жёсткости выполняется
 условие
жёсткости выполняется
условие
жёсткости выполняется
 условие
жёсткости выполняется
условие
жёсткости выполняется
 условие
жёсткости выполняется
условие
жёсткости выполняется
Условие жесткости выполняется.