

Механіка
.pdfСтоділка М.І.
1.ЕЛЕМЕНТИ КІНЕМАТИКИ МАТЕРІАЛЬНОЇ ТОЧКИ
§1.1. Моделі в механіці. Система відліку. Траєкторія, довжина шляху,
вектор переміщення.
Найпростіша модель: матеріальна точка - це тіло, розмірами якого можна знехтувати в даній задачі.
В механіці вивчають рух одної матеріальної точки, а потім узагальнюють для всього тіла.
При взаємодії тіла можуть деформуватись (змінювати свою форму та розміри). Тому в механіці вводиться ще одна модельабсолютно тверде тіло.
Абсолютно тверде тіло таке, в якому при наявності зовнішньої дії, віддаль між частинами цього тіла залишається постійною і його розміри не змінюються.
Будь-який рух твердого тіла можна подати як комбінацію поступального та обертального рухів.
Поступальний - це рух, при якому довільна пряма, яка жорстко зв'язана з рухомим тілом завжди залишається паралельною до початкового свого положення.
Обертальний - це рух, при якому всі точки тіла рухаються по колах, центри яких лежать на осі обертання.
Положення матеріальної точки визначається відносно будь-якого іншого тіла, яке називається тілом відліку.
Система відліку - це сукупність системи координат і годинника, які зв'язані з тілом відліку.
У загальному випадку рух матеріальної точки визначається скалярними рівняннями:
x = x(t)
y = y(t) |
(1.1) |
z = z(t) |
|
які еквівалентні векторному рівнянню: |
|
r = r (t). |
(1.2) |
Рівняння (1.1) та (1.2) називаються кінематичними рівняннями руху матеріальної точки.
Число незалежних координат, які повністю визначають положення точки в просторі називається числом ступенів вільності матеріальної точки. Якщо матеріальна точка рухається в просторі вона має 3 ступені вільності, на площині - 2 ступені вільності, вздовж лінії - 1 ступінь вільності.
Виключивши з рівнянь (1.1) (1.2) t отримаємо рівняння траєкторії. Траєкторія - це лінія, яку описує матеріальна точка в просторі.
Стоділка М.І.
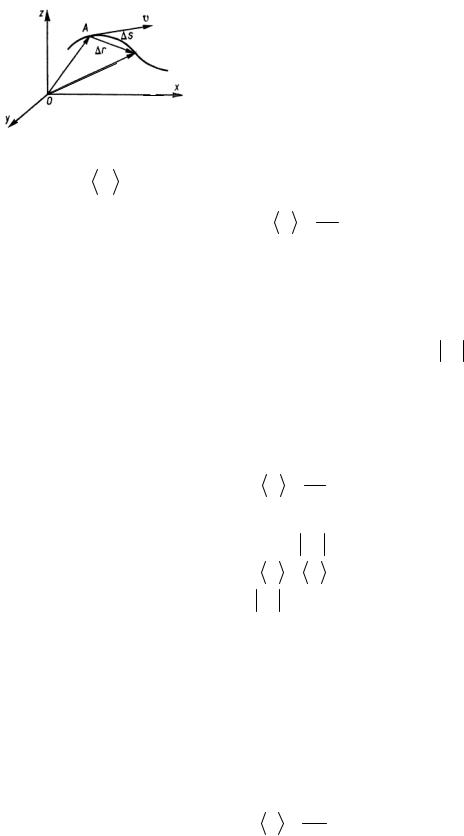
Довжина траєкторії АВ (рис. 1.1), пройдена матеріальною точкою за
даний час називається довжиною шляху ∆S і є скалярною функцією часу:
∆s = ∆s(t ).
|
|
|
|
|
|
|
|
|
Вектор |
∆r = r −r0 |
проведений |
з |
|||
|
|
|
|
|
|
|
|
|
початкового |
положення |
точки |
до |
її |
||
|
|
|
|
|
|
|
|
положення |
в даний |
момент |
часу |
||||
|
|
|
|
|
|
B |
|
|
|||||||
|
|
|
|
|
|
|
|||||||||
|
r0 |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
називається переміщенням. |
|
|
|
||||
|
|
|
|
r |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
§ 1.2. Швидкість |
|
|
||||||
|
|
|
Рис.1.1 |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
Вектором |
середньої |
швидкості |
||||
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
ur називається відношення переміщення до проміжку |
|
||||||||||
|
|
|
|
|
|
|
|
|
r |
|
∆r |
|
|
|
|
Миттєва швидкість: |
u |
= |
∆t |
. часу ∆t : |
|
|
|
||||||||
|
∆r |
= drr . |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
ur = lim |
|
|
|
|||
|
|
|
|
|
|
|
|
|
∆t→0 |
∆t |
dt |
|
|
|
|
Вектор швидкості співпадає з дотичною до кривої.
При зменшенні ∆t величина∆s наближається до ∆rr тому модуль миттєвої швидкості
|
|
r |
|
|
∆r |
|
|
∆rr |
|
|
|
∆ |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|||||
u = |
|
u |
= |
lim |
r |
= lim |
|
|
|
|
= lim |
s |
= ds . |
(1.3) |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|||||||||
|
|
|
|
∆t→0 |
∆t |
∆t→0 |
|
∆t |
∆t→0 |
∆t |
dt |
|
||
При рівномірному русі
u = ∆∆st .
В загальному випадку
∆s > ∆rr ; u > ur .
При прямолінійному русі ∆s = ∆r . З (1.3) виходить, що довжина шляху
t2 |
|
s = ∫u (t )dt . |
(1.4) |
t1 |
|
§ 1.3. Прискорення |
|
Прискорення – це фізична величина. яка чисельно дорівнює зміні швидкості за одиницю часу.
Середнє прискорення
ar = ∆∆ut .
Миттєве прискорення
Стоділка М.І. |
|
|
= dur . |
ar = lim ar |
= lim |
∆u |
|
∆t→0 |
∆t→0 |
∆t |
dt |
Отже, прискорення це |
векторна величина, яка дорівнює першій |
||||
похідній швидкості по часу: |
|
|
dur |
d 2rr |
|
|
r |
|
|
||
|
a |
= |
dt |
= dt2 . |
(1.5) |
Тангенціальне та нормальне прискорення Розглянемо криволінійний рух, в якому швидкість змінюється за
величиною та напрямком.
Нехай тілоr , що рухається криволінійно, у точці А ( рис.1.2) має швидкість u , а через час∆t , в сусідній точці А1, його швидкість буде u1.
Прискорення визначається за формулою
|
|
|
|
ar = lim |
∆u . |
|
|
|
|
||
Тут ∆ur |
|
|
|
∆t→0 |
∆t |
|
|
|
|
||
визначає зміну швидкості за модулем і напрямком. |
|
||||||||||
Розкладемо вектор ∆ur |
на дві |
складові: |
∆uτ - зміну швидкості за |
||||||||
модулем, ∆urn - зміну швидкості за напрямом (рис.1.2). |
|
|
|||||||||
Тоді |
|
|
∆u = ∆urτ + ∆urn . |
|
|
|
|
||||
|
|
|
|
|
|
|
|
||||
Отже прискорення можна визначити як суму двох складових: |
|
||||||||||
|
|
|
ar = lim |
∆uτ + ∆urn = lim |
∆urτ |
+ lim |
∆urn , , |
|
|
||
де |
|
|
∆t→0 |
∆t |
∆t→0 |
∆t |
∆t→0 |
∆t |
|
|
|
r |
r |
|
|
|
|
|
|
|
|
|
|
lim |
∆uτ |
= duτ - |
називається тангенціальним прискоренням, напрям |
||||||||
∆t→0 |
∆t |
∆t |
|
|
|
|
|
|
|
|
|
якого співпадає з напрямом швидкості; |
|
|
|
|
|
|
|||||
lim |
∆urn = durn - |
називається |
нормальним, |
або |
доцентровим |
||||||
∆t→0 |
∆t |
∆t |
|
прискоренням. |
Вектор |
цього |
|||||
|
|
|
|
||||||||
|
|
|
|
прискорення |
перпендикулярний |
до |
|||||
|
|
|
|
вектора швидкості. |
|
|
|||||
|
|
|
|
|
Дійсно, при ∆t → 0 у рівнобедреному |
||||||
|
|
|
|
трикутнику |
BA1C |
кут |
∆α → 0 , |
тому |
|||
|
|
|
|
β → π |
, отже ∆un ur (рис. 1.2). |
|
|||||
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
Рис. 1.2 |
|
Щоб |
|
обчислити |
величину |
||||
|
|
нормального прискорення, треба знайти |
|||||||||
|
|
|
|
||||||||
∆un . Для цього скористаємося рівністю відношень відповідних сторін подібних трикутників OAA1 та A1BC, а саме:
Стоділка М.І. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∆un |
= ∆S . |
|
|
|
|||
|
|
|
|
|
|
u |
|
|
|
||||
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
При ∆α → 0 AA1 → ∆s . |
|
|
|
||||||||
|
|
an = lim |
∆u |
n |
= lim |
∆S |
|
u |
|
= |
u 2 |
. |
|
|
|
|
∆t |
R |
R |
||||||||
|
|
∆t→0 |
∆t |
|
∆t→0 |
|
|
|
|||||
|
|
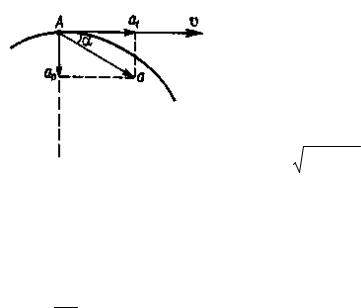
Як виднo з pиc. 1.3 |
|
|
|
|
|
|
|||||
|
|
a = a2 |
+ a2 |
, tgα = an .S |
|
|
|
||||||
|
|
|
|
|
|||||||||
|
Рис.1.3 |
τ |
|
n |
|
|
aτ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Значення тангенціального нормального прискорень можуть бути ознаками різних рухів:
1)aτ = 0 , an = 0 - прямолінійний рівномірний рух;
2)aτ = a = const , an = 0 - прямолінійний рівнозмінний рух:
aτ = a = ddtu ; u = u0 + at
S = ∫t |
udt = ∫t |
(u + at )dt = u0t + at2 |
0 |
0 |
2 |
3)aτ = f (t ), an = 0 - прямолінійний рух із змінним прискоренням;
4)aτ = 0, an = const - рівномірний рух по колу;
5)aτ = f (t ), an ≠ 0 - криволінійний рух із змінним прискоренням.
(1.6)
і
(1.7)
§ 1.4. Кутова швидкість та кутове прискорення
Нехай точка рухається по колу. Елементарні кути (нескінченно малі) повороту розглядають як вектори. Модуль вектора dϕ дорівнює кутові
повороту, а його напрям співпадає з напрямом поступального руху гвинта, тобто визначається за правилом правого гвинта .
Вектори, напрям яких зв'язуються з напрямом обертання називаються псевдовекторами, або аксіальними векторами. Ці вектори не мають певних точок прикладання: вони можуть відкладатися з довільної точки осі обертання.
Кутова швидкість тіла в певний момент часу визначається границею відношення вектора кутового зміщення тіла ∆ϕ до відповідного проміжку
часу:
ωr = lim |
∆ϕ |
= dϕ . |
(1.8) |
|
∆t |
||||
∆t→0 |
dt |
|
Кутова швидкість це вектор, напрямлений по осі обертання відповідно до правила правого гвинта.
Вектор ωr напрямлений як і dϕ .
u = lim |
∆s |
= lim |
R∆ϕ |
= lim |
∆ϕ |
R =ωR , |
|
∆t |
∆t |
∆t |
|||||
∆t→0 |
∆t→0 |
∆t→0 |
|
Стоділка М.І.
υ=ωR.
Період обертання Т – це час, протягом якого точка здійснює один повний оберт.
Частота обертання – кількість обертів за одиницю часу. Тоді
|
|
|
ν = |
1 |
|
|
|
|
|
|
|
|
|
||
Якщо ω = const , то кутова |
|
T |
|
|
|||
швидкість, період та частота зв”язані |
|||||||
співідношеннями |
2π |
|
|
2π |
|
|
|
T = |
, ω = |
|
, ω = 2πν . |
||||
ω |
T |
|
|||||
|
|
|
|
|
|||
Середнє кутове прискорення чисельно дорівнює зміні кутової швидкості за одиницю часу:
εr = ∆∆ωt .
Миттєве кутове прискорення визначається як перша похідна від кутової швидкості:
εr = ddtω .
Враховуючи, що aτ = ddtu одержимо:
aτ = d(ωR), dt
aτ =εR .
Як було показано
an = u 2 =ω2 R . R
При ε = const :
ω= ∫ε dt =ω0 +ε t ;
ϕ= ∫ω dt = ∫(ω0 +ε t )dt =ω0t + ε2t 2 .
Стоділка М.І.
2. ДИНАМІКА МАТЕРІАЛЬНОЇ ТОЧКИ І ПОСТУПАЛЬНОГО РУХУ ТВЕРДОГО ТІЛА.
Класична динаміка базується на трьох законах Ньютона, сформульованих в його роботі "Математичні начала натуральної філософії” (1687 p.).
Ці закони є результатом геніального узагальнення дослідних і теоретичних досліджень в галузі механіки, які були встановлені Ньютоном на базі досліджень його попередників таких як Й. Кеплер, Г. Галілей, Р.Гук та ін.
§ 2.1. Перший закон Ньютона.
Властивість інертності тіл Нютон сформулював як перший закон механіки: усяке тіло зберігає стан спокою або рівномірного прямолінійного руху, поки дія інших тіл не виведе його з цього стану.
Ми раніше дали визначення системи відліку. Хоч її можна вибрати довільно, зрозуміло, що краще вибирати її так, щоб явища природи описувались в ній найбільш просто.
Якщо система відліку зв'язана з якимсь вільно рухомим тілом, то в ній вільний рух інших тіл має досить простий вигляд: він відбувається прямолінійно і рівномірно. В цьому і суть закону інерції.
Отже система відліку, пов'язана з тілом, що вільно рухається називається інерціальною системою відліку.
Системи відліку, відносно яких виконується закон інерції, називаються інерціальними системами відліку.
Інерція - це властивість тіла зберігати стан спокою, або руху, змінювати його не відразу, а поступово.
Як показали досліди геліоцентричну систему відліку можна вважати інерціальною. Початок її координат є в центрі мас Сонячної системи.
Сонячна система обертається навколо центру Галактики з швидкістю 250 км/с, але з періодом 200 млн. років.
Земля рухається зі швидкістю 30 км/с своєю орбітою і за 30 хв. описує дугу 1’.
Система відліку пов”язана із Землею (геоцентрична система) в строгому розуміння цього слова не є інерційною. Однак, спостереження за рухом тіл відносно Землі, показують, що відхилення від інерційності незначні. Тому геоцентричну систему з достатнім наближенням можна вважати інерціальною.
§ 2.2. Другий закон Ньютона.
Сила - кількісна характеристика механічної взаємодії тіл. Дія сили на тіло виявляється двояко: динамічно, коли тіло під дією прикладеної до нього сили набуває прискорення та статично, коли тіло деформується.
Сила – векторна величина. Вона характеризується трьома ознаками: 1) точкою прикладання; 2) напрямком; 3) модулем (значенням).
Пряма, вздовж якої направлена сила називається лінією дії сили.
Стоділка М.І.
Досліди показали, що механічна дія сил, які прикладені в одній точці, повністю еквівалентна дії однієї сили, яка дорівнює їх геометричній сумі.
В абсолютно твердому тілі точку прикладання сили можна переносити вздовж лінії дії цієї сили.
Маса - міра інертності і гравітаційної взаємодії тіл (латинською mass - кусок, груда). Це фундаментальне загально фізичне поняття.
Маса - величина адитивна і скалярна.
Другий закон Ньютона часто називають основним законом динаміки матеріальної точки.Він формулюється так:
Прискорення матеріальної точки пропорційне силі, яка діє на неї і обернено пропорційне масі.
|
r |
|
|
F |
|
|
|
||
|
a |
= |
|
|
. |
|
(2.1) |
||
|
m |
||||||||
|
Fr = m |
du |
, |
|
|||||
|
|
|
|||||||
|
|
|
|
|
dt |
|
|||
|
Fdt = d (mur)= dpr , |
(2.2) |
|||||||
|
r |
|
dp |
|
|
|
|||
|
F |
= |
|
|
|
|
. |
|
|
|
|
dt |
|
|
|||||
|
|
|
|
|
|
|
|||
Відмітимо деякі особливості другого закону Ньютона: |
|||||||||
а) Fr - результуюча всіх сил, прикладених до тіла ; |
|||||||||
r |
r |
|
|
|
|
|
|
|
|
б) вектори a |
і F однаково напрямлені; |
|
|||||||
в) Fr - причина руху, ar - наслідок; |
|
|
|
|
|
|
|
||
г) при Fr = const має місце рівноприскорений рух. |
|||||||||
Величина pr |
= mur називається імпульсом тіла, a |
Fdt - імпульсом сили. |
|||||||
§2.3. Принцип відносності Галілея. Перетворення Галілея.
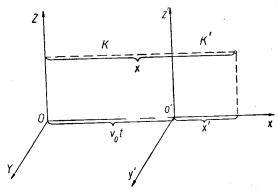
Вмеханічному відношенні всі інерціальні системи рівноправні. Це означає, що закони динаміки у всіх ситемах відліку математично описуються одинаково. В цьому суть принципу відносності Галілея.
Нехай система S1
|
рухається відносно системи S |
Рис.2.1 |
з швидкістю u0 . |
Стоділка М.І.
Тоді, виходячи з рис. 2.1 можна записати зв'язок між координатами матеріальної точки А для цих систем:
x = x |
−u |
t |
|
1 |
0 |
|
(2.3) |
y1 = y |
|
|
|
z1 = z |
|
|
|
|
|
|
|
Отримані співвідношення називаються перетвореннями Галілея. |
|||
Закон додавання швидкостей: u = ur1 +ur0 . |
|
u0 = const , отримаємо: |
|
Взявши похідну по часу і враховуючи, що |
|||
ddtu = ddtu1 , тобто прискорення залишаються сталими в усіх інерційних
системах.
Звідси виходить, що рівняння динаміки при переході від одної до інерційної системи відліку до іншої не міняються, тобто є інваріантними повідношенні до перетворення координат.
§ 2.4. Третій закон Ньютона. Закон збереження Імпульсу.
Якщо тіло 2 діє на тіло 1, то є дія і навпаки. Так, наприклад, на ведучі колеса електровоза діють з боку рейок сили тертя спокою, які напрямлені в сторону руху електровоза. Сума цих сил і є сила тяги електровоза. В свою чергу ведучі колеса діють на рейки з силами тертя спокою, напрямленими в протилежний бік.
Кількісний опис взаємодії тіл даний Ньютоном в третьому законі динаміки:
Дії завжди існує рівна протидія. Сили, з якими взаємодіють тіла рівні за величиною, протилежні за напрямком і напрямлені вздовж прямої , яка сполучає цетри їх мас..
F12 = −F21.
Сили дії і протидії прикладені до різних тіл, тому не можна вважати, що їх рівнодійна рівна нулю.
Сили, які діють між тілами однієї системи називаються внутрішніми. Сили, що діють з боку інших тіл, які не входять до її складу називаються зовнішніми.
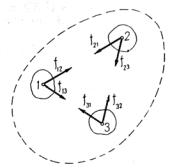
Якщо взаємодією між тілами системи і зовнішніми тілами можна знехтувати, то таку систему називають замкнутою (ізольованою) (рис.2.2).
r Розглянемо замкнуту систему, яка складається fij - силу дії j-того тіла на i-те. Запишемо другий
закон Нютона для кожного з них:

Стоділка М.І.
(f12 + (f21 + (f31 +
r
rf13 )
fr23 ) f32 )
dt = d (m1ur1 ); dt = d (m2ur2 ); dt = d (m3ur3 ),
За третім закономrНютона: |
|
f12 = −f21; f23 = −f32 ; f13 = −f31. |
|
Додавши ліві частини одержемо: |
|
d (m1u1 + m2ur2 + m3ur3 )= 0 ; |
|
або |
|
m1ur1 + m2ur2 + m3ur3 = ∑miuri = const |
(2.4) |
Вектор pr = ∑miuri називається повним вектором імпульсу системи.
Повний вектор імпульсу системи залишається незмінним. Цей закон справедливий і в релятивістській механіці.
§2.5. Центр мас і закон його руху.
Вмеханіці Ньютона маса не залежить від швидкості, внаслідок чого імпульс тіла можна виразити через швидкість центру його мас.
Під рухом тіла розуміють рух його центра мас (центра інерції). Центром мас системи матеріальних точок називають таку точку, в якій
зосередилась би уся маса системи матеріальних точок, якби вони взаємодіяли з нескінченно зростаючими силами притягання. З означення випливає, що центром мас двох матеріальних точок є точка, яка ділить відстань між ними на відрізки, що обернено пропорційні масам.
Центром мас (інерції) системи матеріальних точок називається точка C, положення якої задається радіусвектором, що дорівнює відношенню суми добутків мас усіх матеріальних точок системи на їх радіуси вектори до маси всієї системи:
Швидкість центра мас:
|
urc = drrc |
|
r |
r |
dt |
Враховуючи, що pi = miui |
, а |
|
r |
1 |
n |
r |
|
|||
rc = |
|
∑miri |
(2.5) |
||||
m |
|||||||
|
|
|
|
i=1 |
|
|
|
|
∑mi |
drdti |
∑miuri |
|
|||
= |
|
|
|
|
= |
|
. |
|
dt |
|
m |
||||
|
|
|
|
|
|||
∑pi є імпульс системи, можна записати: p = murc .
Підставивши в другий закон Ньютона отримаємо закон руху центра мас:
m ddtuc = Fr;

Стоділка М.І.
dtd (murc )= Frзовн .
Як бачимо, центр мас замкнутої системи взаємодіючих тіл рухається рівномірно і прямолінійно, або перебуває в стані спокою.
§ 2.6. Рух тіла змінної маси.
Розглянемо рух тіла, маса якого змінюється з часом. Під вливом механічних взаємодій частин системи, процесів пов”язаних із теплообміном між ними, процесів, механічні процеси яких є наслідком хімічні або ядерних реакцій, окремі складові системи змінюють свій імпульс, що в першу чергу виражається у зміні їхньої швидкості.
Реактивний рух ракети, є наглядним прикладом системи, принцип руху якої грунтується на викиданні певної маси продуктів згоряння палива, внаслідок чого корисна частина загальної маси ракети набуває швидкості, необхідної в залежності від поставлених задач (рух супутника-зв”язку навколо Землі, доставка вантажу на орбітальну станцію, досягнення поверхні інших планет і т.п.).
Нехай маса ракети в довільний момент часу- m ,, а u-її швидкістью Імпульс ракети в цей момент часу буде mu
Через деякий час dt (rтобто в момент часу ( t + dt )) маса і швидкість одержать приріст dm du відповідно (rвеличина dm -від”ємна) Імпульс ракети в цей момент буде (m + dm)(u + du) , а імпульс газів, які утворились
при згорянні палива за час dt - dm1u1 ( тут dm1 -маса газів, u1 - швидкість їх
витікання.). r
Швидкості u і ur1 беруться відносно інерційної системи відліку, в якій
розглядається рух.
Віднімаючи від загального імпульсу системи в момент часу t + dt
імпульс системи в момент часу t, знайдемо приріст цієї величиниr за час dt . dpr = (m + dm)(ur + dur+ dm1ur1 −mur) = udmr + mdϑ + dmdϑ + dm1ur1
Добуток dmdu можна відкинути, як нескінченно малу величину вищого порядку.
Враховуючи закон збереження маси dm + dm1 = 0 , виключимо масу газів dm1 . Крім того, введемо швидкість витікання газів відосно ракети u ,
тодіur1 = ur +ur
Тоді зміна імпульсу буде мати вигляд dpr = udmr + mdur −dmur−dmur = mdur−udmr
Виходячи з другого закону Ньютона ( dpr = Fdt ), запишемо mdur−udmr = Fdtr
Поділивши на dt , одержимо