

Механіка
.pdfСтоділка М.І.
m dur = Fr +ur dm dt dt
За формою це рівняння співпадає з рівнянням другого закону Ньютона. Однак маса m тут не постійна, а міняється з часом і до зовнішньої сили
додається додатовий член urdmdt , який називають реактивною силою, тобто
силою, з якою діють на ракету гази, що витікають з неї. Цей вираз називається рівнянням Мещерського, або рівнянням точки із змінною масою.
Застосуємо рівняння Мещерського до руху ракети, на яку не діють
ніякі зовнішні сили. Поклавши F = 0 , одержимо mdur =udmr
Припустимо, що ракета рухається прямолінійно в напрямі, протилежному до швидкості газів. Якщо напрям ракети прийняти за додатній, то проекція вектора u на цей напрям буде від’ємною. Тому в скалярній формі останнє рівняння можна записати:
mdu = −udm du = −u dmm
Припустивши, що швидкість u залишається постійною, одержимо
m |
dm |
|
|
m |
|
u = −u ∫ |
m |
= −u ln |
|
|
|
m |
|||||
m |
|
|
|
0 |
|
0 |
|
|
|
|
|
Отже, |
|
|
|
|
u |
u =u ln m0 , або |
m0 |
|
|||
= eu |
|||||
|
m |
|
m |
|
|
Це співвідношення називається формулою Ціолковського. Вона одержана для нерелятивістських рухів, тобто для випадків, коли швидкості u і ϑ малі в порівнянні зі швидкостю світла.
§ 2.7. Категорії і види сил.
Всі сили можна розділити на такі категорії:
1)сили, які обумовлені безпосередньою взаємодією (удар, тиск, тертя);
2)сили, які зв'язані з особливою формою матерії, яка називається полем, що здійснює взаємодію тіл без безпосереднього контакту.
Зточки зору закону збереження енергії в механіці сили можна розділити на консервативні і дисипативні.
Робота консервативних сил залежить тільки від зміни в розміщенні тіл, або частин системи, але не залежить від шляху (сили тяжіння, пружності).
Робота дисипативних сил приводить до перетворення механічної енергії в енергію теплового руху частинок тіла, тобто до розсіювання механічної енергії (сили тертя).
Стоділка М.І.
Є чотири типи елементарних взаємодій: сильна, слабка (обидві ядерні), електромагнітна, і гравітаційна.
З кількісної сторони кожна з них характеризується безрозмірною константою. Для сильної вона дорівнює одиниці, електромагнітної - 1/137, слабкої – 10-14 , гравітаційної – 10-39.
Слабкі та сильні взаємодії проявляються на віддалі 10-15 м (це короткодіючі), електромагнітні та гравітаційні - далекодіючі вони відіграють вирішальну роль в макросистемах.
Умеханічних явищах домінуючими є сили тертя, пружних деформацій
ігравітаційні сили. Два перших типи сил мають електромагнітну природу.
§ 2.8. Сили тертя.
Сили, які виникають у процесі руху одних тіл, або їх частин по поверхні інших і перешкоджають рухові називаються силами тертя.
|
Розрізняють |
зовнішнє |
(сухе) і внутрішнє |
|
|
(рідке або в'язке) тертя. |
|||
|
Сухим тертям називають взаємодію тіл |
|||
|
у місцях їх дотику. Ця взаємодія зводиться |
|||
|
до деформацій і молекулярних зчеплень |
|||
|
стичних частинок тіл. |
|
||
|
Сухе тертя, яке виникає між взаємно |
|||
Рис.2.3 |
нерухомими |
тілами |
називається тертям |
|
спокою, або тертям |
зчеплення. Сухе тертя, яке |
|||
|
||||
виникає між рухомими тілами називається кінематичним.
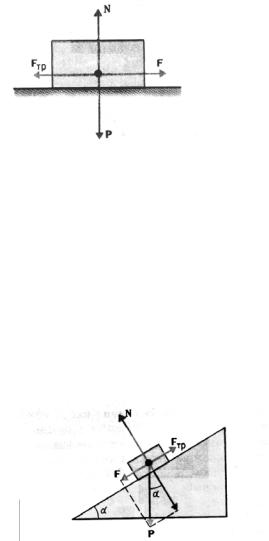
Тертя спокою проявляється у тому, що для приведення в рух одного з тіл до нього треба прикласти зовнішню силу F > F0 , де F0 - максимальне
значення сили тертя спокою (рис.2.3)
Закон Г. Амонтона (1663-1705), Ш. Кулона (1736-1806), встановлений дослідним шляхом:
|
Fтр = µ N |
|
(2.6) |
|
||||
N - сила нормального тиску, або реакція опори; µ - коефіцієнт тертя. |
||||||||
Тіло на похилій площині (рис 2.4): |
|
На початку ковзання: |
||||||
|
|
|
|
|||||
|
|
|
|
|
|
Fтр = mg sinα0 ; |
||
|
|
|
|
|
mg sinα0 |
= µ N = µ mg cosα0 ; |
||
|
|
|
|
|
|
|
µ = tgα0 , |
|
|
|
Радикальним |
способом зменшення |
|||||
|
|
сили тертя є заміна тертя ковзання |
||||||
Рис.2.4 |
|
тертям кочення. Сила тертя кочення |
||||||
визначається за законом Кулона: |
||||||||
|
||||||||
|
F |
= µ |
|
|
N |
|
|
|
|
|
|
r |
|
||||
|
тр |
|
к |
|
|
|||
Стоділка М.І.
де r - радіус тіла, яке котиться.
|
§ 2.9. Сили пружних деформацій. |
||
|
|
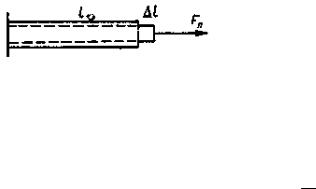
Деформація розтягу. |
|
|
|
У процесі розтягу виникають внутрішні |
|
|
|
сили, що намагаються надати тілу |
|
|
|
попередніх розмірів і форми. Ці сили |
|
|
|
називають пружними, або повертаючими. |
|
Рис.2.5 |
|
||
|
За законом Гука: |
||
|
|
F = −k x , |
(2.7) |
де: x - величина пружної деформації; k - коефіцієнт жорсткості тіла. Механічна напруга:
σ = FS ;
F – прикладена сила;
S- площа поперечного перерізу. Відносне видовження
ε = |
∆l =α F =α σ ; |
|
|||||
Тоді |
l |
|
|
S |
|
||
|
ε |
|
|
|
|
||
σ = |
= ε E , |
(2.8) |
|||||
α |
|||||||
|
|
|
|
|
|
||
де E - модуль пружності, (у деформаціях розтягу E називають модулем |
|||||||
Юнга) (рис.2.5) |
|
|
|
|
|
|
|
Якщо ε =1. Тоді |
|
∆l = |
l −l0 |
|
|
||
ε = |
=1 |
|
|||||
|
|
||||||
Звідки |
|
l |
|
l0 |
|
||
|
l |
= 2 l0 . |
|
||||
|
|
|
|||||
Отже модуль Юнга чисельно дорівнює такій напрузі, при якій довжина стержня збільшиться в два рази.
Деформація стиску.
Якщо прикласти стискуючу напругу σ , то закон Гука для такої пружної деформації виражають через відносне потовщення стержня ∆dd , а
саме:
∆dd = β σ ,
де β - коефіцієнт одностороннього стиску (рис.2.6)

Стоділка М.І. |
|
|
|
|
|
||
|
|
Зважаючи |
на неодмінне |
поєднання |
|||
|
|
деформацій |
розтягу |
|
і |
стиску |
їх |
|
|
характеризують коефіцієнтом Пуассона: |
|
||||
|
|
µ = |
β |
|
|
|
|
|
Рис.2.6 |
|
|
|
|||
α |
|
|
|||||
|
|
|
|
|
|
||
|
|
|
|
|
|
||
для більшості однорідних та ізотропних тіл (металів)
Деформація зсуву.
Деформація зсуву полягає в зміщенні одного відносно іншого шарів тіла. Це можна спостерігати на прямокутному бруску, якщо нижню основу закріпити, а до верхньої прикласти тангенціальну силу Fτ (рис. 2.7) . У цій
|
деформації bb' - абсолютний зсув, ψ = bb' |
- |
||
|
відносний зсув. |
|
d |
|
|
|
|
|
|
|
Закон Гука: |
1 |
|
|
|
ψ = |
σt , |
|
|
|
|
|
||
|
деG - модуль зсуву. |
G |
|
|
|
|
|
|
|
|
Для більшості однорідних та ізотропних тіл |
|||
Рис.2.7 |
(металів) G ≈ 0,4 E . |
|
|
|
|
|
|
|
|
Деформація кручення.
Якщо стержень циліндричної форми з одного кінця закріпити, а до другого прикласти момент сил M, то стержень зазнає деформації кручення (рис.2.8.). Кут закручування в цій деформації змінюється від нуля до деякого найбільшого значення ϕm ;
ϕm - абсолютне кручення.
ϕbm - відносне кручення.
Для пружного кручення
ϕbm = D1 M ,
D - модуль кручення.
D = π R4 G . 2 b
Стоділка М.І.
3. ЕНЕРГІЯ. РОБОТА. ПОТУЖНІСТЬ.
Енергія і робота мають важливе значення в житті людини, тому займають особливе місце в науці. Енергоозброєність людини визначає загальний технічний розвиток суспільства.
Вусіх перетвореннях руху однієї форми в іншу міняється тільки якість,
акількість, що називається енергією, залишається незмінною.
Енергія - це універсальна міра всіх форм руху і взаємодії тіл.
§ 3.1. Робота. Потужність.
Щоб характеризувати процес обміну енергією між взаємодіючими тілами в механіці вводиться поняття роботи сили (скалярна величина).r
Якщо тіло рухається прямолінійно і на нього діє постійна сила F під кутом α до напрямку переміщення, то робота цієї сили дорівнює добутку переміщення на проекцію сили на напрям переміщення:
A = Fs cosα = Fs s |
(3.1) |
В загальному випадку елементарна робота сили dA = Fdrr = Fds cosα = FS ds .
Робота сили на ділянці траєкторії від т. 1 до т. 2 дорівнює алгебраїчній сумі елементарних робіт на окремих нескінченно малих ділянках шляху. Ця сума приводиться до інтеграла:
|
|
|
2 |
2 |
|
|
|
|
|
|
A = ∫Fds cosα = ∫Fs ds |
(3.2) |
|||
|
|
π |
1 |
1 |
π |
|
|
Якщо |
α < |
робота додатна. Якщо |
α > |
- робота |
від'ємна. При |
||
|
|
2 |
|
|
2 |
|
|
α= π2 - робота сили дорівнює нулю. 1 Дж. = 1 Н м.
Потужність характеризує швидкість виконання роботи:
|
dA |
|
Fdr |
r |
r |
|
N = |
dt |
= |
dt |
= F |
u |
(3.3) |
тобто робота дорівнює скалярному добуткові вектора сили на вектор
швидкості ( N -скалярна величина. 1 Вт =1 Дж/с., 1 к.с. = 736 Вт). |
|
||||
Наведемо |
приклади |
середніх |
потужностей: кінь – 600 Вт |
(0,8 к.с.), |
|
автомобіль |
МАЗ-525 – |
220 кВт |
(300 к.с.), тепловоз |
ТЭ-10Л – |
2210 кВт |
(3000 к.с,), |
літак ИЛ-18 – 11800 кВт (16000 к.с.). |
Потужність |
ДТ-54 – |
||
54 к.с., а тягова (на валу) – 37 к.с.
При даній потужності машина може розвивати більшу силу тяги, коли швидкість менша і навпаки. Тому транспортні засоби, при збільшенні сили опору, за допомогою коробки передач переходять на меншу швидкість.
Трактор ДТ-54 на 1-й швидкості ~ 1 м/с., F = 25650 Н., на 5-й - 2,1 м/с., F = 9600 H. Сила опору в польоті літака і опору води при русі корабля пропорційна квадратові швидкості, то за формулою (3.3) потужність їх двигунів повинна зростати пропорційно кубові швидкості. Це означає, що

Стоділка М.І.
для збільшення швидкості літака або корабля в два рази потужність двигунів необхідно збільшити в вісім разів.
§ 3.2. Кінетична і потенціальна енергія.
Кінетична енергія - це енергія механічного руху. Кінетичною енергією називають ту частину механічної енергії, яка залежить від швидкості руху тіл.
Сила F , діючи на нерухоме тіло, виконує роботу, а енергія рухомого тіла зростає на величину затраченої роботи. Отже, робота dA сили на шляху, іде на збільшення кінетичної енергії тіла: dA = dT .
Використаємо другий закон Ньютона:
|
|
Fr = m |
du |
; |
|
|
r r |
dr |
dt |
|
|||
|
|
|
|
|||
r |
|
r |
r |
|
||
Fdr |
= m dt du |
= mudu |
= dA = dT ; |
|||
T = ∫mudu ;
= mu2
T (3.4)
2
Цю формулу встановив Гельмгельц (1821 - 1894) (нім.). Отже, кінетична енергія залежить від m і u . Кінетична енергія залежить від системи відліку.
Потенціальна енергія - механічна енергія системи тіл, яка визначається взаємним розміщенням і характером сил взаємодії між ними.
Нехай взаємодія здійснюється через силові поля (пружні, гравітаційні). Якщо в кожній точці простору діє сила, то цю сукупність сил називають
полем.
Постійне силове поле (незалежне від часу) має важливу властивість: якщо в такому полі матеріальна точка рухається по замкнутій кривій, то виконувана робота дорівнює нулю. Таке поле називають консервативним або потенціальним.
Робота консервативних сил при елементарній (нескінченно малій) зміні конфігурації системи дорівнює приростові потенціальної енергії, взятому із знаком “мінус”, оскільки робота виконується за рахунок зменшення потенціальної енергії:
dA = −dП; Fdrr = −dП ,
або |
|
|
r |
|
dП |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
F |
= − |
|
r |
; |
|
|
|
|
|
|
dП |
|
|
|
dr |
|
|
|
dП |
|
F |
= − |
; F |
= − |
dП |
; F |
= − |
; |
||||
x |
|
dx |
y |
|
|
dy |
|
z |
dz |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
F = −grad П |
|
(3.5) |
||||||

Стоділка М.І.
grad П = ∂∂Пx ir + ∂∂Пy rj + ∂∂Пz kr.
Конкретний вигляд функції П залежить від характеру силового поля. Наприклад, потенціальна енергія тіла масою m , піднятого на висоту h над поверхнею Землі:
П = mgh |
(3.6) |
Початок відліку береться довільно. Тому потенціальна енергія може бути від'ємною. Якщо потенціальну енергію тіла на поверхні Землі прийняти за нуль, то потенціальна енергія тіла, яке лежить на дні шахти глибиною h':
П = −mgh'.
Отже, робота сили дорівнює збільшенню величини T = m2u2 - кінетичної енергії. З другого боку
|
|
dA = −dП; |
|
|
||||
−dП = dT = d |
mu2 |
; |
|
|||||
2 |
|
|
||||||
|
|
|
2 |
|
|
|
|
|
|
|
= 0 ; |
|
|
||||
d mu |
|
+ П |
|
|
||||
|
|
2 |
|
|
|
|
|
|
E = |
mu2 |
|
|
|
|
|
(3.7) |
|
2 |
+ П =T + П = const |
|||||||
|
|
|
|
|
|
|
|
|
Отримане співвідношення виражає закон збереження енергії в механіці: в замкнутій системі сума кінетичної і потенціальної енергії є величина стала.
Потенціальна енергія пружно деформованого тіла:
Для здійснення деформації потрібно виконати роботу проти сил пружності. Ця робота буде мірою потенціальної енергії деформації. Сили пружності за законом Гука (2.7)
F = −kx .
Тому елементарна робота, що виконується при розтягу тіла на dx, дорівнює:
dA = Fdx = −kx dx .
Враховуючи, що dA = −dП, запишемо dП = kx dx .
Після інтегрування одержимо формулу потенціальної енергії пружної деформаці
x |
|
2 |
|
П = ∫kx dx = kx |
. |
(3.8) |
|
0 |
2 |
|
|
|
|
|
|

Стоділка М.І.
Потенціальна енергія тіла в гравітаційному полі:
Робота по переміщенні тіла масою m з точки 1 в точку 2, які знаходяться над поверхнею Землі і на відстанях R1 і R2 від її центра відповідно, визначається інтегралом:
R2 |
R2 |
dr |
|
1 |
|
R2 |
mM |
|
mM |
|
1 |
||
|
|
|
|||||||||||
A = ∫Fdr =γ mM ∫ |
|
|
|
|
|
||||||||
|
2 |
= −γ mM |
|
|
= −γ |
|
+γ |
|
=γ mM |
|
|||
r |
r |
R2 |
R1 |
R1 |
|||||||||
R |
R |
|
|
|
R1 |
|
|
||||||
|
|
|
|
||||||||||
1 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
деr - змінна віддаль між центрами мас Землі і тіла Визначена робота дорівнює зміні потенціальної енергії тіла
A = −∆П = −(П2 − П1 ) .
− 1
R2
Таким чином, потенціальна енергія тіла в полі тяжіння Землі визначається формулою
П= −γ mMR .
§3.3. Космічні швидкості.
Тіла (штучні супутники ), що обертаються навколо Землі, рухаються зі швидкістю ~ 7,9 км/с. Знайдемо чому саме таку швидкість необхідно надати тілам, щоб вони обертались по коловій орбіті навколо Землі. При обертальному русі тіла навколо Землі сила тяжіння повинна забезпечувати зміну напрямку швидкості тіла ( при незмінній її величині), тобто відігравати роль доцентрової сили:
= mu2 mg R1 ;
Звідси
u1 = gR ,
де R - відстань від орбіти до Землі. Це перша космічна швидкість.
Якщо швидкість тіла, при виводі його на орбіту, збільшувати, то орбіта його руху навколо Землі витягуватиметься і при швидкості 11,2 км/с тіло перейде на параболічну орбіту і залишить межі переважаючого гравітаційного притягання Землі. Цю швидкість називають другою космічного швидкістю.
Її можна обчислити за тією кінетичною енергією, яку повинно мати тіло, щоб виконати роботу виходу за межі тяжіння Землі, а саме:
|
muII2 |
= −∞∫γ |
mM3 |
dr ; |
|||
|
2 |
r2 |
|||||
звідси |
|
Rз |
|
|
|
||
|
|
|
|
|
|||
|
|
mu2 |
mM |
|
; |
||
|
|
|
II |
=γ |
R |
3 |
|
|
|
|
2 |
||||
|
|
|
|
|
|
||
|
|
|
|
|
З |
|
|
і, кінцево

Стоділка М.І.
u |
II |
= 2γ M3 |
= |
2gR , |
|
RЗ |
|
З |
|
|
|
|
|
де RЗ - радіус Землі.
Космічні швидкості визначені без врахування опору повітря та впливу тяжіння інших планет і тому мають наближений характер. Надаючи космічному апаратові швидкості понад 11,2 км/с, можна послати його у сферу тяжіння інших планет або Сонця.
Запускаючи космічний корабель з Землі, йому можна надати і такої швидкості, при якій корабель залишить сонячну систему. Цю швидкість називають третьою космічною. Її величина залежить від напряму запуску корабля щодо орбітального руху Землі і значення її буде найменшим, коли корабель запускати в напрямі орбітального руху Землі.
Третю космічну швидкість можна обчислити за тією кінетичною енергією, яку повинно мати тіло для виконання роботи виходу за межі тяжіння спочатку Землі, а потім Сонця. Рух космічного корабля зручно розраховувати в системі координат, яка пов’язана з тим небесним тілом, у сфері тяжіння якого є корабель.
Щоб вийти за межі тяжіння Сонця, корабель повинен мати кінетичну енергію достатню для виконання роботи виходу:
|
muП2 |
= −∞∫γ |
mMC |
dr , |
|
|
2 |
r2 |
|||
звідси |
|
R0 |
|||
|
|
|
|
||
uП = 2γ |
MC = 2u3 , |
||||
|
|
|
R0 |
||
де:
uП - параболічна швидкість корабля в Сонячній системі; MC - маса Сонця;
R0 - радіус орбіти Землі;
u3 - орбітальна швидкість Землі.
Враховуючи, що u3 = 29,75 км/с знаходимо, що uП = 42 км/с. Така
параболічна швидкість космічного корабля в сонячній системі. Ця швидкість у геоцентричній системі при умові, що швидкість корабля на границі тяжіння з Землею збігається з швидкістю орбітального руху Землі буде: u 'П = uП −u3 = 12,25 км/с.
Отже, щоб запустити корабель з Землі для польоту за межі тяжіння Сонця, йому потрібно надати кінетичну енергію, достатню для виходу за сферу тяжіння Землі і збереження параболічної швидкості u 'П , достатньої
для виходу за сферу тяжіння Сонця:
mu |
2 |
|
mu 2 |
mu '2 |
|
|
III |
= |
II |
+ |
П , |
2 |
|
2 |
|||
|
|
|
2 |
||
звідки

Стоділка М.І.
uIII2 = uII2 + u '2П = 16,7 км/с.
Таке мінімальне значення третьої космічної швидкості (максимальне значення -72,7 км/с). Вийшовши при такій швидкості за сферу тяжіння Сонця, корабель рухатиметься траєкторією, яка мало відрізнятиметься від траєкторії Сонця. Для цілеспрямованого польоту корабля йому потрібно надати швидкість, яка значно перевищує третю космічну.
Середня віддаль від Землі до Сонця – 150 млн. км.
§ 3.4. Застосування законів збереження до центрального удару куль.
Удар - це зіткнення двох або більше тіл, при якому взаємодія триває дуже короткий час.
При ударі в тілах виникають настільки великі внутрішні сили, що зовнішніми можна знехтувати. Це дозволяє розглядати взаємодіючі тіла як замкнуту систему і застосувати до неї закони збереження.
Спостереження показують, що відносна швидкість після удару не досягає свого попереднього значення. Це свідчить про те, що немає ідеально пружних тіл та ідеально гладких поверхонь.
Відношення нормальних складових відносної швидкості після і до удару називається коефіцієнтом відновлення:
ε= uП . uП
Якщо, для взаємодіючих тіл, ε = 0, то такі тіла називаються абсолютно непружними і, якщо ε = 1 - абсолютно пружними. На практиці 0 < ε < 1 (для стальних куль ε ≈ 0,56, для куль із слонової кості ε = 0,89, для куль зі свинцю ε ≈ 0).
Пряма, яка проходить через точку дотику тіл і нормальна до поверхні їх дотику називається лінією удару.
Удар називається центральним, якщо тіла до удару рухаються вздовж прямої, яка проходить через їх центри.
Абсолютно пружний удар:
В результаті абсолютно пружного удару в обох тілах, що взаємодіють не залишається ніяких деформацій і сумарна кінетична енергія тіл залишається незмінною. Для абсолютно пружного удару виконується закон збереження імпульса і закон збереження кінетичної енергії.
r rНехай кулі з масами m1 і m2 до удару мали швидкості відповідно u1 і u2 , після удару їх швидкості стали відповідно u1 і u2 . При прямому
цетральному ударі вектори швидкостей куль до і після удару лежать на прямій, яка з’єднує їх центри. Модулі цих швидкостей дорівнюють проекціям їх векторів на цю лінію.Запишемо закон збереження енергії і імпульсу: