

Sb96728
.pdfМИНОБРНАУКИ РОССИИ
__________________________________________________________________
Санкт-Петербургский государственный электротехнический университет «ЛЭТИ» им. В. И. Ульянова (Ленина)
_____________________________________________
Б. В. БРУСЛИНОВСКИЙ Н. А. ДОБРОСКОК А. Н. ЛУКИЧЕВ
ЛАБОРАТОРНЫЙ ПРАКТИКУМ ПО НЕЛИНЕЙНЫМ СИСТЕМАМ УПРАВЛЕНИЯ
Учебно-методическое пособие
Санкт-Петербург Издательство СПбГЭТУ «ЛЭТИ»
2018
УДК 681.511.4(07)
ББК З 965.5я7 Б89
Бруслиновский Б. В., Доброскок Н. А., Лукичев А. Н.
Б89 Лабораторный практикум по нелинейным системам управления: учеб.- метод. пособие. к лаб. работам по дисциплине «Нелинейные системы управления» СПб.: Изд-во СПбГЭТУ «ЛЭТИ», 2018. 32 с.
ISBN 978-5-7629-2269-2
Содержит методические рекомендации к выполнению лабораторных работ по дисциплине «Нелинейные системы управления».
Предназначено для студентов, обучающихся по направлению 27.03.04 «Управление в технических системах», может быть полезно инженернотехническим работникам этой сферы деятельности.
УДК 681.511.4(07)
ББК З 965.5я7
Рецензент: канд. техн. наук К. С. Ляпидов (филиал «ЦНИИ СЭТ» ФГУП «Крыловский государственный научный центр»)
Утверждено редакционно-издательским советом университета
в качестве учебно-методического пособия
ISBN 978-5-7629-2269-2 |
© СПбГЭТУ «ЛЭТИ», 2018 |
Лабораторная работа 1. ИССЛЕДОВАНИЕ СТАТИЧЕСКИХ ХАРАКТЕРИСТИК ТИПОВЫХ НЕЛИНЕЙНОСТЕЙ
Цель работы – исследование статических характеристик нелинейных звеньев; построение результирующих характеристик типовых соединений звеньев.
1.1.Общие сведения
Вавтоматических системах управления существуют элементы, зависимость между входом и выходом которых описывается нелинейными уравнениями. Нелинейные элементы делятся на преднамеренные и непреднамеренные. Преднамеренные элементы специально вводятся в проектируемую систему для придания ей специфических свойств, которые невозможно получить при использовании устройств с линейными характеристиками. Непреднамеренные нелинейности имеют нелинейную характеристику в силу физических законов, на основании которых они функционируют.
Статические характеристики нелинейных элементов имеют ряд общих свойств: симметричность, однозначность и гладкость.
Последнее свойство делит нелинейные характеристики на существенные и несущественные. Характеристики существенных нелинейностей содержат точки, в которых производная от выходного сигнала по входному не определена (например, характеристика с насыщением или зоной нечувствительности), в то время как несущественная нелинейная функция, а также еѐ первая, вторая и т. д. производные непрерывны на всѐм диапазоне изменения входного сигнала (функции синуса, косинуса, степенная функция).
Некоторые нелинейные элементы ввиду особенностей их характеристик и интенсивности использования в составе систем управления отнесены к категории типовых нелинейностей. Обычно для их представления используют не реальную характеристику, а кусочно-линейную аппроксимацию, как показано на рис. 1.1. Особенности таких характеристик будут исследованы в лабораторной работе.
Системы автоматического управления, содержащие нелинейные элементы, называются нелинейными. Процессы в таких системах имеют целый ряд существенных особенностей, которые не присущи линейным системам.
3
|
z |
z |
|
z |
|
|
|
c |
|
c |
|
a |
x |
a |
x |
b a |
x |
|
а |
а |
|
а |
b |
|
|
c |
|
c |
|
|
а |
б |
|
в |
|
|
z |
z |
|
z |
|
|
c |
c |
|
c |
|
|
x |
a |
x |
a |
x |
|
|
а |
|
а |
|
|
c |
c |
|
c |
|
|
г |
д |
|
е |
|
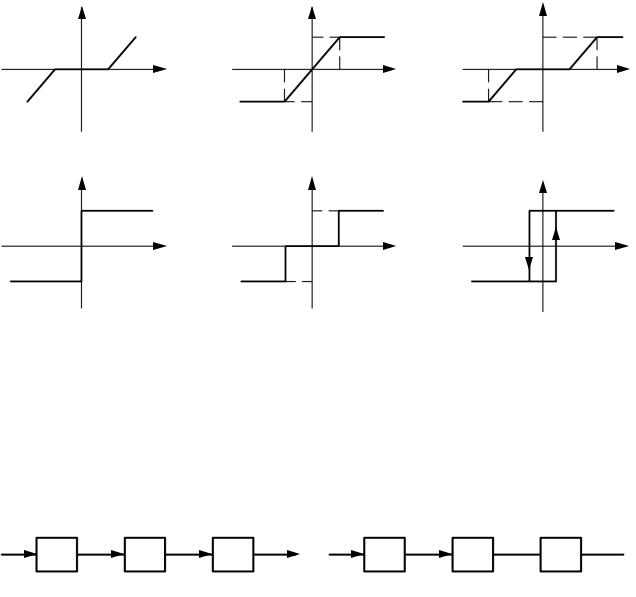
Рис. 1.1. Графики статических характеристик типовых нелинейных элементов:
а– зона нечувствительности; б – насыщение; в – зона нечувствительности с насыщением;
г– двухпозиционное реле; д – трехпозиционное реле; е – гистерезис
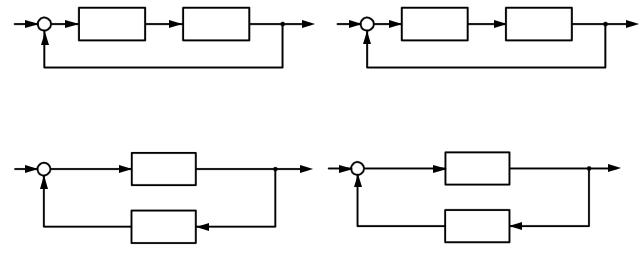
Для нелинейных систем невыполним принцип коммутативности, что усложняет по сравнению с линейными системами структурные преобразования. Проверить это свойство можно построением результирующих характеристик, например, последовательного соединения звеньев нескольких нелинейных элементов для вариантов, приведенных на рис. 1.2.
x |
1(x) |
y |
2(y) |
w |
3(w) |
z |
x |
2(x) |
y |
1(y) |
|
|
|
|
|
|
|||||
|
|
|
a |
|
|
|
|
|
|
б |
w  3(w) z
3(w) z 
Рис. 1.2. Статические характеристики типовых соединений нелинейных элементов: а – прямой порядок звеньев; б – измененный порядок звеньев
Кроме того, к особенностям нелинейных систем относятся: невыполнение принципа суперпозиции; возникновение периодических колебаний, называемых автоколебаниями; возможность нескольких равновесных состояний, часть из которых может быть устойчива, а другая нет; переход из одного установившегося движения в другое под действием внешних сил.
1.2.Порядок выполнения работы
1.Создать новую модель в Matlab Simulink: New Simulink Model.
2.Во вкладке Configuration Parameters/Solver задать настройки расчета переходных процессов type – fixed step; step size – 1e–4.
4
3. Для каждой из нелинейностей (рис 1.1) построить статическую характеристику с параметрами, заданными в табл. 1.1. Для построения статических характеристик использовать блоки библиотеки Simulink\Discontinuties: Dead Zone (зона нечувствительности); Relay (двухпозиционное реле с гистерезисом); Saturation (насыщение).
|
|
|
|
|
|
Таблица 1.1 |
|
|
|
|
|
|
|
|
|
Вари- |
|
|
Тип нелинейности (x) |
|
|
||
|
рис. 1.1, б |
рис. 1.1, в |
|
рис. 1.1, д |
рис. 1.1, е |
||
ант |
рис. 1.1, а |
рис. 1.1, г |
|||||
(c = 1) |
(c = 1) |
(c = 1) |
(c = 1) |
||||
|
|
|
|||||
1 |
а = 0.9 |
a = 1.1 |
a = 0.1, b = 1.1 |
c = 0.2 |
a = 0.3 |
a = 0.30 |
|
2 |
а = 0.1 |
a = 1.2 |
a = 0.2, b = 1.2 |
c = 0.3 |
a = 0.3 |
a = 0.35 |
|
3 |
а = 0.1 |
a = 1.3 |
a = 0.4, b = 1.4 |
c = 0.4 |
a = 0.1 |
a = 0.10 |
|
4 |
а = 0.2 |
a = 1.4 |
a = 0.3, b = 1.3 |
c = 0.5 |
a = 0.2 |
a = 0.15 |
|
5 |
а = 0.3 |
a = 1.5 |
a = 0.5, b = 1.5 |
c = 0.6 |
a = 0.2 |
a = 0.20 |
|
6 |
а = 0.4 |
a = 1.6 |
a = 0.2, b = 1.2 |
c = 0.7 |
a = 0.2 |
a = 0.25 |
|
7 |
а = 0.5 |
a = 1.7 |
a = 0.3, b = 1.3 |
c = 0.8 |
a = 0.7 |
a = 0.40 |
|
8 |
а = 0.5 |
a = 1.8 |
a = 0.1, b = 1.1 |
c = 0.9 |
a = 0.4 |
a = 0.45 |
|
9 |
а = 0.3 |
a = 1.9 |
a = 0.5, b = 1.5 |
c = 1.0 |
a = 0.6 |
a = 0.10 |
|
10 |
а = 0.4 |
a = 2.0 |
a = 0.2, b = 1.2 |
c = 0.1 |
a = 0.5 |
a = 0.20 |
|
4. В качестве входного сигнала использовать элемент Sine Wave. При этом параметры задать так, чтобы амплитуда синусоидального сигнала была больше значения характерных точек нелинейностей, а период составил 2 с.
|
|
|
Таблица 1.2 |
|
|
|
|
Вари- |
|
Тип нелинейности (x) |
|
ант |
1(x) |
2(y) |
3(w) |
1 |
рис. 1.1 б: a = 2, c = 5 |
рис. 1.1 д: a = 1, c = 3 |
w2 |
2 |
рис. 1.1 б: a = 2, c = 5 |
рис. 1.1 д: a = 1, c = 3 |
w3 |
3 |
рис. 1.1 б: a = 2, c = 5 |
рис. 1.1 а: a = 0.5 |
w2 |
4 |
рис. 1.1 б: a = 2, c = 5 |
рис. 1.1 а: a = 0.5 |
w3 |
5 |
рис. 1.1 г: с = 4 |
рис. 1.1 а: a = 0.5 |
w2 |
6 |
рис. 1.1 г: с = 4 |
рис. 1.1 а: a = 0.5 |
w3 |
7 |
рис. 1.1 а: a = 0.5 |
рис. 1.1 д: a = 1, c = 3 |
w2 |
8 |
рис. 1.1 а: a = 0.5 |
рис. 1.1 д: a = 1, c = 3 |
w3 |
9 |
рис. 1.1 а: a = 0.5 |
рис. 1.1 e: a = 2, c = 2 |
w2 |
10 |
рис. 1.1 а: a = 0.5 |
рис. 1.1 e: a = 2, c = 2 |
w3 |
5. Во второй части работы построить схему результирующей характеристики последовательного соединения звеньев (рис. 1.2, а) согласно варианту из табл. 1.2. Затем поменять местами первые две нелинейности и снова построить схему результирующей характеристики последовательного соединения звеньев (рис. 1.2, б).
5
6. Представить результаты исследований в виде статических характеристик согласно таблице вариантов.
Содержание отчета
1.Титульный лист.
2.Цель работы.
3.Расчетные схемы согласно варианту, выполненные в Matlab Simulink.
4.Графики статических характеристик по каждой схеме.
5.Выводы по выполнению свойства коммутативности в нелинейных системах.
Контрольные вопросы
1.Преднамеренные и непреднамеренные нелинейности.
2.Типовые нелинейные элементы.
3.Аналитическое описание однозначных нелинейностей.
4.Аналитическое описание неоднозначных нелинейностей.
5.Общие свойства статических характеристик.
Лабораторная работа 2. ВЛИЯНИЕ НЕЛИНЕЙНОСТИ ЗВЕНЬЕВ НА ПОКАЗАТЕЛИ КАЧЕСТВА СИСТЕМЫ УПРАВЛЕНИЯ
Цель работы – оценка влияния на свойства линейной системы реальных характеристик ее звеньев с учетом нелинейностей.
2.1.Общие сведения
Вреальных системах управления при изменении переменных состояния
вшироких пределах статические характеристики типа вход-выход многих звеньев и устройств нелинейны. Нелинейности могут быть как непреднамеренными, так и преднамеренными. К непреднамеренным относятся реальные элементы и устройства систем автоматического управления с нелинейными характеристиками, к преднамеренным – нелинейные элементы, вводимые специально для придания системе свойств, которые невозможно обеспечить с помощью линейных элементов.
Однако для упрощения анализа и синтеза управляемых устройств во многих случаях рассматриваются линейные приближенные характеристики. Линейная модель получается линеаризацией исходной нелинейной в окрестности некоторого установившегося режима движения в системе при условии,
6
что переменные состояния изменяются незначительно в окрестности выбранного установившегося режима. В этом случае при учете реальных характеристик свойства реальной системы будут отличаться.
Структурные схемы систем управления с усилителем в прямом канале и в обратной связи приведены соответственно на рис. 2.1 и 2.2.
xз |
|
|
|
z |
|
x |
xз |
z |
|
(x) |
x |
||||
|
|
|
|
|
k |
Wл(p) |
|
|
|
|
|
|
|
Wл(p) |
|
|
|
|
|
|
|
а |
|
|
|
|
|
|
|
б |
|
|
Рис. 2.1. Структурная схема системы управления с усилителем в прямом канале: |
||||||||||||||
|
|
|
|
|
|
а – с линейным усилителем; б – с нелинейным звеном |
|
||||||||
xз |
|
|
|
|
z |
Wл(p) |
x |
xз |
|
|
z |
Wл(p) |
x |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
(x) |
|
|
|
|
|
|
|
а |
|
|
|
|
|
|
|
б |
|
Рис. 2.2. Структурная схема системы управления с усилителем в канале обратной связи:
а– с линейным усилителем; б – с нелинейным звеном
Вкачестве нелинейных звеньев в работе рассматриваются типовые нелинейности (зона нечувствительности, насыщение, зона нечувствительности
снасыщением, двухпозиционное реле, трехпозиционное реле, гистерезис), представленные ранее на рис. 1.1.
2.2.Порядок выполнения работы
1.Создать новую модель в Matlab Simulink: New Simulink Model.
2.Во вкладке Configuration Parameters/Solver задать настройки расчета переходных процессов type – fixed step; step size – 1e–4.
3.Собрать модель системы управления с линейным усилителем в прямом канале (рис. 2.1, а), заданную в таблице вариантов. Получить графики переходных процессов. Подбором k получить различные виды переходных процессов. Записать значения показателей качества.
4.Проследить изменения переходного процесса при замене усилителя нелинейным звеном (рис. 2.1, б) типа «зона нечувствительности». Получить графики переходных процессов и значения показателей качества.
5.Повторить п. 4 для нелинейности типа «насыщение».
7
6.Повторить п. 4 для нелинейности типа «зона нечувствительности с насыщением».
7.Повторить п. 4 для нелинейности типа «двухпозиционное реле».
8.Повторить п. 4 для нелинейности типа «трехпозиционное реле».
9.Повторить п. 4 для нелинейности типа «гистерезис».
10.Сделать выводы о влиянии нелинейностей на качество и вид переходных процессов.
11.Собрать модель системы управления с линейным усилителем в канале обратной связи (рис. 2.2, а), заданную в таблице вариантов. Получить графики переходных процессов. Подбором k получить различные виды переходных процессов. Записать значения показателей качества.
12.Проследить изменения переходного процесса при замене усилителя нелинейным звеном (рис. 2.2, б) типа «зона нечувствительности».
13.Проследить изменения переходного процесса при замене усилителя нелинейными звеньями аналогично п. 5 – п. 9. Получить графики переходных процессов и значения показателей качества.
14.Сделать выводы о влиянии нелинейностей на качество и вид переходных процессов. Сравнить степень изменения показателей качества в зависимости от места ввода нелинейности.
Вари- |
|
|
Тип нелинейности (z) |
|
|
|
|
|
рис. 1.1, |
рис. 1.1, |
рис. 1.1, |
рис. 1.1, |
рис. 1.1, |
рис. 1.1, |
|
Wл(p) |
|
ант |
а |
б (c = 1) |
в (c = 1) |
г |
д (c = 1) |
е (c = 1) |
|
|
|
|
|
||||||
1 |
а = 0.9 |
a = 1.0 |
a = 0.1, b = 1.1 |
c = 0.2 |
a = 0.3 |
a = 0.30 |
4/(0.5p2 + p) |
|
2 |
а = 1 |
a = 1.0 |
a = 0.2, b = 1.2 |
c = 0.3 |
a = 0.3 |
a = 0.35 |
|
5/(3p2 + p) |
3 |
а = 0.1 |
a = 1.0 |
a = 0.4, b = 1.4 |
c = 0.4 |
a = 0.1 |
a = 0.10 |
2/(0.3p2 + p) |
|
4 |
а = 0.2 |
a = 1.0 |
a = 0.3, b = 1.3 |
c = 0.5 |
a = 0.2 |
a = 0.15 |
5/(0.4p2 + p) |
|
5 |
а = 0.3 |
a = 1.0 |
a = 0.5, b = 1.5 |
c = 0.6 |
a = 0.2 |
a = 0.20 |
4/(0.25p2 + p) |
|
6 |
а = 0.4 |
a = 1.0 |
a = 0.2, b = 1.2 |
c = 0.7 |
a = 0.2 |
a = 0.25 |
2/(0.1p2 + p) |
|
7 |
а = 0.5 |
a = 1.0 |
a = 0.3, b = 1.3 |
c = 0.8 |
a = 0.7 |
a = 0.40 |
|
5/(p2 + p) |
8 |
а = 0.6 |
a = 1.0 |
a = 0.1, b = 1.1 |
c = 0.9 |
a = 0.4 |
a = 0.45 |
5/(0.1p2 + p) |
|
9 |
а = 0.7 |
a = 1.0 |
a = 0.5, b = 1.5 |
c = 1.0 |
a = 0.6 |
a = 0.10 |
1/(0.1p2 + p) |
|
10 |
а = 0.8 |
a = 1.0 |
a = 0.2, b = 1.2 |
c = 0.1 |
a = 0.5 |
a = 0.20 |
|
1/(2p2 + p) |
Содержание отчета
1.Титульный лист.
2.Цель работы.
3.Расчетные схемы согласно варианту, выполненные в Matlab Simulink.
4.Графики переходных характеристик по каждой схеме.
5.Выводы по влиянию нелинейностей на динамические характеристики.
8
Контрольные вопросы
1.В чем различия преднамеренных и непреднамеренных нелинейностей?
2.Примеры непреднамеренных нелинейностей в реальных элементах различных технических систем.
3.Чему равен контурный коэффициент усиления в системе?
4.Перечислите основные показатели качества. Как они изменяются при учете нелинейного звена в системе?
5.Дайте определение понятия линеаризованной системы. Перечислите основные методы линеаризации.
6.В каких случаях в ходе лабораторной работы прослеживалась статическая ошибка в системе?
7.Обладает ли исследуемая система статической устойчивостью?
Лабораторная работа 3. КОРРЕКЦИЯ НЕЛИНЕЙНЫХ АВТОМАТИЧЕСКИХ СИСТЕМ
Цель работы – исследование влияния нелинейных корректирующих устройств на свойства линейной системы и влияния линейных корректирующих устройств на свойства нелинейной системы; исследование коррекции нелинейной системы нелинейными корректирующими устройствами.
3.1. Общие сведения
При разработке систем автоматического управления могут решаться две взаимоисключающие задачи:
–ослабление негативного влияния непреднамеренной нелинейности на свойства системы;
–введение нелинейности для придания линейной системе свойств, которые невозможно получить при линейном варианте коррекции.
Коррекция с помощью нелинейных устройств возможна как в линейных, так и в нелинейных системах. При этом нелинейная коррекция обладает более широкими возможностями, чем линейная, так как она позволяет менять форму частотных характеристик в зависимости от амплитуды сигнала. Это качество нелинейной коррекции придает свойство самонастройки по величине ошибки, возникающей в процессе управления. Задача нелинейной коррекции может заключаться в достижении желаемых свойств процессов управления, причем должна предусматриваться возможность изменения этих свойств с изменением величины отклонения. Таким образом, открывается
9

возможность преодолеть известное из линейной теории противоречие между требованиями точности и требованиями устойчивости системы, а также значительно усиливать регулирующее воздействие при больших отклонениях.
В лабораторной работе рассматриваются следующие схемы коррекции систем автоматического управления.
Схема 1. Коррекция линейной системы нелинейным корректирую-
щим устройством. Исследуется быстродействие линейной системы с пропорциональным и нелинейным регулятором, структурные схемы, которых приведены на рис. 3.1.
xз |
|
z |
|
u |
x |
xз |
|
z |
u |
x |
|
|
|
k |
Wл(p) |
|
|
|
|
(z) |
Wл(p) |
|
|
|
|
а |
|
|
|
|
б |
|
Рис. 3.1. Структурная схема системы управления: а – с линейным регулятором;
б– с нелинейным корректирующим устройством
Влинейной системе управления (рис. 3.1. а) увеличение быстродействия достигается увеличением коэффициента усиления пропорционального регулятора k. При этом происходит увеличение колебательности переходного процесса. Введение нелинейного корректирующего устройства
u kz2sign z ,
где sign z – знаковая функция, принимающая значение, равное единице, когда аргумент положителен, и равное минус единице, когда аргумент отрицателен, позволяет повысить быстродействие при сохранении монотонного характера процесса.
Схема 2. Коррекция линейной системы нелинейным корректирую-
щим устройством. Исследуется быстродействие линейной системы с пропорциональным регулятором, местной обратной связью и нелинейным регулятором, структурные схемы, которых приведены на рис. 3.2. В системе с нелинейным регулятором сигнал, пропорциональный модулю ошибки, подается на вход умножителя и затем вычитается из выходного сигнала местной обратной связи. Тем самым сигнал обратной связи уменьшается, когда ошибка возрастает, что приводит к ускорению отработки больших отклонений и уменьшению скорости отработки в конце процесса.
10