

Sb97952
.pdfДля того чтобы получить траекторию движения заряженной частицы в электрическом поле, необходимо решить (4.5) относительно радиуса-вектора. Чтобы решить ОДУ второго порядка, воспользуемся функцией rkfixed. Функция rkfixed используется для поиска решения методом Рунге–Кутты четвертого порядка. Функция rkfixed имеет следующие аргументы:
rkfixed (k, t1, t2, npoints, D),
где k – вектор начальных значений; t1, t2 – граничные точки интервала, на котором ищется решение; npoints – число точек, в которых ищется приближенное решение; D – функция, возвращающая значение в виде вектора из npoints элементов, которые в случае ОДУ второго порядка представляют собой первые и вторые производные функции.
Зададим начальные условия для вектора k (задается в виде столбца): k (x0 ,vx , y0 ,vy ,z0 ,vz ) ,
где vx , vy , vz – это первые производные по соответствующим координатам.
Функция D(t, k) является вектором с шестью элементами (из которых три (k1, k3, k5) – это первые производные от координат, определенные ранее, а оставшиеся – вторые производные от координат, которые получаются исходя из второго закона Ньютона, записанного для магнитной силы):
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
1 |
|
|
|
|
|
|
|
|
q(k3Bz k5By ) |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
3 |
|
|
|
|
|
|
|
|
|
|
1 |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
mk 2 |
|
|
|
|
|
k 2 |
/с2 |
|
|
|
с2 |
|
|
|
|
|
k 2 |
с2 |
|
|
|
|||
|
|
1 |
|
|
m |
1 |
|
|
|
|||||||||||||||||
|
|
1 |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
3 |
|
|
|
|
|
|
|
|
q(k5Bx k1Bz ) |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
||||||
D( t , k ) |
|
|
|
|
|
|
|
|
|
|
1 |
3 |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
mk 2 |
|
|
|
|
|
k 2 |
/с2 |
|
|
|
с2 |
|
|
|
|
|
k 2 |
с2 |
|
|
|
|||
|
1 |
|
|
m |
1 |
|
|
|||||||||||||||||||
|
|
|
3 |
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
k5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
q(k1Bx k3Bz ) |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
1 |
3 |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
||
|
|
mk 2 |
|
|
|
|
|
k 2 |
/с2 |
|
|
|
с2 |
|
|
|
|
|
k 2 |
с2 |
|
|
|
|||
|
1 |
|
|
m |
1 |
|
|
|||||||||||||||||||
|
|
|
5 |
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
21
При записи вектора D(t, k) необходимо следить за тем, чтобы неравенство v c не нарушалось ни в один момент рассматриваемого времени.
Вычисление решения в 4000 промежуточных точках на отрезке времени
[0, 0.00000001 с]: RK = rkfixed (r, 0, 0.000000001, 4000, Z).
Матрица, полученная в результате решения, содержит семь столбцов: первый содержит значения t, при которых ищется решение; второй – x(t); третий – x'(t); четвертый – y(t); пятый – y'(t); шестой – z(t); седьмой – z'(t).
Таблица 4.1
Результаты моделирования движения заряженной частицы в магнитном поле
t, с |
x, м |
vx, м/с |
y, м |
vy, м/с |
z, м |
vz, м/с |
0 |
0.09 |
0 |
–0.03 |
0 |
–0.09 |
0 |
|
|
|
|
|
|
|
1E-11 |
0.09 |
–1.702E+7 |
–0.03 |
–1.053E+7 |
–0.09 |
0 |
|
|
|
|
|
|
|
2.5E-11 |
0.09 |
1.128E+7 |
–0.03 |
–1.653E+7 |
–0.09 |
0 |
|
|
|
|
|
|
|
5E-11 |
0.09 |
1.862E+7 |
–0.03 |
–7.317E+6 |
–0.09 |
0 |
|
|
|
|
|
|
|
7.5E-11 |
0.09 |
1.95E+7 |
–0.03 |
4.457E+6 |
–0.09 |
0 |
|
|
|
|
|
|
|
1E-10 |
0.09 |
1.362E+7 |
–0.03 |
1.467E+7 |
–0.09 |
0 |
|
|
|
|
|
|
|
2E-10 |
0.09 |
–1.994E+7 |
–0.03 |
–1.497E+6 |
–0.09 |
0 |
|
|
|
|
|
|
|
3E-10 |
0.09 |
1.565E+7 |
–0.03 |
–1.248E+7 |
–0.09 |
0 |
|
|
|
|
|
|
|
4E-10 |
0.09 |
–2.986E+6 |
–0.03 |
1.978E+7 |
–0.09 |
0 |
|
|
|
|
|
|
|
Согласно условию, частица движется вдоль оси 0x, магнитное поле направлено вдоль оси 0z. Поэтому z-я составляющая скорости будет равна нулю.
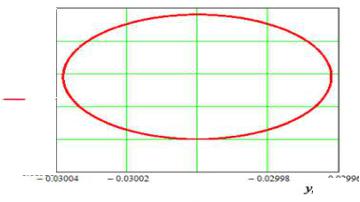
Траектория движения электрона представляет собой зависимость координаты x от y. Для этого построим график зависимости x f ( y) для всего временного интервала моделирования (рис. 4.1).
x,, м
0.09006
RK<1>
0.09
– |
<3> |
–-0.02998 |
y,y,мм |
-0.03002 |
RK |
|
|
|
RK<3> |
|
|
Рис.4.1
22
При этом для получения доступа к столбцу, задающему координаты, в массиве [RK] необходимо использовать треугольные скобки , в которые вписывается номер столбца (для x – 1, для y – 3).
4.5. Содержание отчета
1.Основные теоретические сведения по моделированию движения заряженной частицы в магнитном поле для заданных условий.
2.Привести таблицу с результатами моделирования движения заряженной частицы в магнитном поле для заданных условий.
3.Привести график зависимости z f (x) для всего временного интер-
вала моделирования.
4.Привести листинг кода программы, моделирующей движение заряженной частицы в магнитном поле для заданных условий.
5.Сформулировать выводы по результатам моделирования движения заряженной частицы в магнитном поле для заданных условий.
4.6.Вопросы для самоконтроля
1.По какой траектории в общем случае движется точечный электрический заряд в постоянном (не меняется с течением времени) однородном (одинаковом в любой точке геометрического пространства) магнитном поле?
2.Меняется ли кинетическая энергия (энергия движения) заряженной частицы, движущейся в постоянном и однородном магнитном поле?
5.МОДЕЛИРОВАНИЕ ДВИЖЕНИЯ ЗАРЯЖЕННОЙ ЧАСТИЦЫ
ВЭЛЕКТРОМАГНИТНОМ ПОЛЕ
Цель работы: ознакомление с методикой моделирования движения заряженной частицы в электромагнитном поле.
5.1. Основные теоретические положения
На точечный заряд, помещенный в электромагнитное поле, действует
сила Лоренца, определяемая выражением |
|
F q(Е v B) . |
(5.1) |
По второму закону Ньютона, если на тело действуют силы (действие системы сил на точечное тело всегда можно свести к действию одной силы – результирующей), то тело меняет свой импульс:
F = dp/dt. |
(5.2) |
23

Импульс заряженной частицы в общем случае определяется по формуле p = γmv, (5.3)
где p – вектор импульса заряженной частицы; γ – релятивистский фактор (гамма-фактор, Лоренц-фактор); m – масса заряженной частицы; v – вектор скорости заряженной частицы.
Гамма-фактор для заряженной частицы определяется соотношением
|
1 |
, |
(5.4) |
1 (v2/с2 ) |
где v скалярная проекция вектора скорости заряженной частицы на рассматриваемое направление движения; с скорость распространения электромагнитной волны в вакууме.
Для того чтобы получить уравнение движения заряженной частицы в электромагнитном поле (5.5), можно подставить (5.1), (5.3), (5.4) в уравне-
ние (5.2):
|
q |
|
|
|
m |
|
|
||
(Е v B) aγ vγ , |
(5.5) |
|||
где a – вектор ускорения частицы; |
– производная по времени от гамма- |
|||
фактора ( ).
Решив (5.5) относительно радиуса-вектора, получим траекторию движения заряженной частицы в электромагнитном поле.
В случае если скорость движения заряженной частицы много меньше скорости распространения электромагнитной волны в вакууме (v << c), то релятивистский фактор принимается равным единице (γ = 1). При этом необходимо следить за тем, чтобы неравенство v << c не нарушалось ни в один последующий момент рассматриваемого времени.
5.2.Указания к выполнению работы
1.Смоделировать (любым методом, описание выбранного метода привести в основных теоретических положениях) движение заряженной частицы в электромагнитном поле для заданных условий.
2.Получить таблицу с результатами моделирования движения заряженной частицы в электромагнитном поле для заданных условий.
3.Построить график зависимости z f (x) для всего временного интер-
вала моделирования.
24
5.3. Пример типового задания
Электрон влетает в скрещенные электрическое и магнитное поля со скоростью v = –1 м/с. Индукция магнитного поля B = 7 Тл (поле направлено вдоль оси 0x), напряженность электрического поля E = 600 В/м (поле направлено вдоль оси 0y). Смоделировать движение электрона, если известно, что он движется вдоль оси 0x. Координаты электрона в начальный момент вре-
мени ( t0 ): x0 1.2 · 10–2 м; y0 –3 · 10–2 м; z0 –6 · 10–2 м.
5.4. Пример решения задания
Компоненты напряженности электрического поля:
Ex 0; E y 600 В/м; Ez 0.
Компоненты индукции магнитного поля:
Bx 0; By 0; Bz –3 Тл.
Компоненты скорости электрона: vx –1 м/с ; v y 0; vz 0.
Координаты электрона в начальный момент времени: x0 12 · 10–2 м; y0 –3 · 10–2 м; z0 –6 · 10–2 м.
1.Для решения ОДУ второго порядка воспользуемся функцией rkfixed. Данная функция используется для поиска решения методом Рунге–Кутты четвертого порядка.
2.Задается вектор начальных условий:
x0vxy0
k ,vyz0vz
где vx , vy ,vz первые производные по соответствующим координатам.
3. Функция D(t, k) является вектором с шестью элементами (из которых три (k1, k3, k5) – это первые производные от координат, определенные ранее, а оставшиеся – вторые производные от координат, которые получаются исходя из второго закона Ньютона, записанного для силы магнитной силы):
25
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
qEx q(k3Bz k5By ) |
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
1 |
||||||||||||
|
mk 2 |
1 |
k 2 |
c2 |
|
|
c2 |
|
1 |
k 2 |
c2 |
|
|
|
|||||||||||
|
|
|
|
m |
|
|
|
|
|||||||||||||||||
|
|
1 |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
k3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
qEx q(k1Bz |
k5Bx ) |
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
D( t , k ) |
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
1 |
|
. |
||
|
1 k32 |
c2 |
1 |
|
1 k32 |
c2 |
1 |
||||||||||||||||||
|
mk32 |
|
|
|
|
|
c2 |
|
m |
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
qEx q(k1By |
k3Bx ) |
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
||
|
|
1 k52 |
c2 |
1 |
|
1 k52 |
c2 |
1 |
|
|
|||||||||||||||
mk52 |
|
|
c2 |
|
|
|
|||||||||||||||||||
|
|
|
|
|
m |
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
При записи вектора D(t, k) нужно следить за тем, чтобы неравенство v c не нарушалось ни в один момент рассматриваемого времени.
4. Для вычислений используйте функцию rkfixed.
Вычисление решения в 1000 промежуточных точках на отрезке времени
[0, 1·10–13 с]: RK = rkfixed (k, 0, 10–13, 1000, Z).
5. Выведите таблицу с результатами моделирования движения заряженной частицы в электромагнитном поле. Матрица, получаемая в результате решения (табл. 5.1), должна содержать семь столбцов: первый – t, второй – x(t), третий – vx, четвертый – y(t), пятый – vy, шестой – z(t), седьмой – vz.
Таблица 5.1
Результаты моделирования движения заряженной частицы в магнитном поле
t, с |
x, м |
vx, м/с |
y, м |
vy, м/с |
z, м |
vz, м/с |
0 |
0.12 |
0 |
–0.03 |
0 |
0.06 |
0 |
|
|
|
|
|
|
|
1E-11 |
0.12 |
–1.702E+7 |
–0.03 |
–1.053E+7 |
0.06 |
1.128E+7 |
|
|
|
|
|
|
|
2.5E-11 |
0.12 |
1.128E+7 |
–0.03 |
–1.653E+7 |
0.06 |
–1.497E+6 |
|
|
|
|
|
|
|
5E-11 |
0.12 |
1.862E+7 |
–0.03 |
–7.317E+6 |
0.06 |
–1.248E+7 |
|
|
|
|
|
|
|
7.5E-11 |
0.12 |
1.95E+7 |
–0.03 |
4.457E+6 |
0.06 |
1.978E7+ |
|
|
|
|
|
|
|
1E-10 |
0.12 |
1.362E+7 |
–0.03 |
1.467E+7 |
0.06 |
–1.994E+7 |
|
|
|
|
|
|
|
2E-10 |
0.12 |
–1.994E+7 |
–0.03 |
–1.497E+6 |
0.06 |
1.565E+7 |
|
|
|
|
|
|
|
26
Траектория частицы изменяется в очень узком пределе, что является следствием малого значения магнитной индукции. Действие электрической составляющей можно наблюдать по изменению составляющих скоростей vy и vz, вследствие чего частица движется по винтовой траектории.
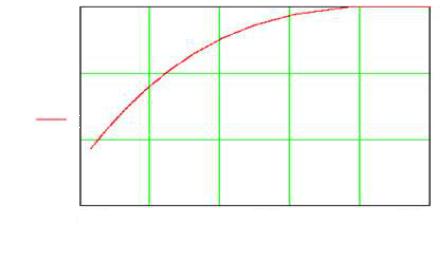
6. Постройте график зависимости z f (x) для всего временного интервала моделирования (рис. 5.1).
z, м
0..0604
RK<5>
00..0602
0. |
<1> |
. |
x,мм |
|
01202. |
RK |
> |
0.1208 |
|
|
|
|
|
|
Рис. 5.1
Для получения доступа к столбцу, задающему координаты, в массиве [RK] необходимо использовать треугольные скобки , в которые вписывается номер столбца.
5.5.Содержание отчета
1.Основные теоретические сведения по моделированию движения заряженной частицы в электромагнитном поле для заданных условий.
2.Привести таблицу с результатами моделирования движения заряженной частицы в электромагнитном поле для заданных условий.
3.Привести график зависимости z f (x) для всего временного интер-
вала моделирования.
4.Привести листинг кода программы, моделирующей движение заряженной частицы в электромагнитном поле для заданных условий.
5.Сформулировать выводы по результатам моделирования движения заряженной частицы в электромагнитном поле для заданных условий.
5.6. Вопросы для самоконтроля
1. По какой траектории в общем случае движется точечный электрический заряд в постоянном (не меняется с течением времени) однородном
27

(одинаковом в любой точке геометрического пространства) электромагнитном поле?
2. Меняется ли кинетическая энергия (энергия движения) заряженной частицы, движущейся в постоянном или однородном электромагнитном поле?
6. МОДЕЛИРОВАНИЕ ПРОЦЕССА РАССЕЯНИЯ ДВИЖУЩИХСЯ ЗАРЯДОВ
Цель работы: ознакомление с методикой моделирования рассеяния движущихся зарядов друг на друге.
6.1. Основные теоретические положения
Движущийся электрический заряд создает вокруг себя электрическое и магнитное поля, зависящие от скорости его движения:
E |
1 q |
1 2 |
|
r |
, |
(6.1) |
||||
|
|
|
|
|
|
|
|
|||
4 0 r2 [1 |
2sin ]3/ 2 |
|
r |
|||||||
|
|
|
|
|||||||
B μ0 q v r , 4π r3
где v/с – безразмерная скорость электрического заряда; – угол между направлением вектора скорости движения заряженной частицы и ее радиу- сом-вектором.
Уравнение движения одной заряженной частицы в электромагнитном поле другой заряженной частицы:
q |
|
|
|
|
|
|
|
m(Е v B) a v |
. |
(6.2) |
|
Решив (6.2) относительно радиуса-вектора, можно получить траекторию движения заряженной частицы в электромагнитном поле другой движущейся заряженной частицы.
В случае если скорость движения заряженной частицы много меньше скорости распространения электромагнитной волны в вакууме ( v c ), то релятивистский фактор принимается равным единице ( 1, 0 ). При этом необходимо следить за тем, чтобы неравенство v c не нарушалось ни в один последующий момент рассматриваемого времени.
6.2.Указания к выполнению работы
1.Смоделировать (любым методом, описание выбранного метода привести в основных теоретических положениях) движение заряженной частицы в
28
электромагнитном поле другой движущейся заряженной частицы для заданных условий.
2.Получить таблицу с результатами моделирования движения заряженной частицы в электромагнитном поле другой движущейся заряженной частицы для заданных условий.
3.Построить график зависимости z f (x) для всего временного интер-
вала моделирования.
6.3. Пример типового задания
Смоделировать рассеяние двух движущихся электрических зарядов, изначально находящихся в состоянии покоя. Заряды: q1 = N пКл, q2 = (6 – N) пКл, где N – номер студента в списке группы. Массы зарядов:
m = (13 – N) · 10–31 кг, m = N · 10–31 |
кг. |
|
1 |
2 |
|
Исходные |
координаты расположения зарядов: x01 = (N – 13) м; |
|
y01 = (8 – N) м; z01 = 0; x02 = (13 – N) м; y01 = (–8 + N) м; z02 = 0.
6.4. Пример решения задания
Решение можно выполнить в ПО MS Excel. Время разбивается на отрезки ( dt 2E10 c), в течение которых скорость и ускорение считались постоянными. Исходные координаты заряженных частиц:
x01 = –11 · 10–6 м; y01 = 4 · 10–6 м; z01 = 0; x02 = 11 · 10–6 м; y02 = –4 · 10–6 м; z02 = 0.
Заряды заряженных частиц:
q1 = 2 · 10–31 Кл, q2 = 4 · 10–31 Кл.
Массы заряженных частиц:
m1 = 1.1 · 10–11 кг, m2 = 2· 10–12 кг.
Начальные скорости равны нулю: vx = 0; vy = 0; vz = 0.
Начальные координаты по оси z равны нулю, частицы не перемещаются по данной оси, поэтому задача псевдотрехмерная. Кроме того, при рассеивании частицы не успевают достичь скоростей, при которых необходимо учитывать магнитное поле и релятивистский эффект, поэтому ими можно пренебречь. Тогда для каждой частицы можно записать уравнения:
ri ri1 vi dt [м], |
(6.4) |
vi vi1 ai dt [м/с], |
(6.5) |
29
|
|
|
|
|
|
|
|
a |
i |
|
|
qEi |
[м/с2]. |
|
|
|
|
|
(6.6) |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Подставим (6.1) в (6.6): |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
q |
1 |
|
|
|
|
q |
|
|
1 2 |
|
|
|
r |
2 |
|
|
||||||
a |
|
|
1 |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
[м/с |
], |
(6.7) |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
1 |
|
|
m 4 |
0 |
|
|
r |
2 |
2 |
3/2 |
|
r |
|
|
|
|||||||||||
|
|
|
1 |
|
|
|
|
|
|
|
|
(1 sin ) |
|
|
|
|
|
|
||||||||
|
|
|
q |
1 |
|
|
|
|
q |
|
|
|
|
1 2 |
|
|
r |
2 |
|
|
||||||
a2 |
|
2 |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
[м/с ]. |
|
||||
m |
4 |
0 |
|
r |
2 |
|
2 |
3/2 |
|
r |
|
|||||||||||||||
|
|
|
2 |
|
|
|
|
|
|
|
(1 sin ) |
|
|
|
|
|
|
|
|
|||||||
Для получения рассеяния пришлось предположить, что частицы имеют начальные скорости. Сначала вычисляется ускорение первой частицы с учетом скоростей и координат двух частиц в предыдущий отрезок времени (6.7), затем ускорение второй частицы:
v r (v x1 v x2 )2 (x1 x2 ) (v y1 v y2 )2 ( y1 y2 ) , v 
 (v x1 v x2 )2 (v y1 v y2 )2 ,
(v x1 v x2 )2 (v y1 v y2 )2 ,
r 
 (x1 x2 )2 ( y1 y2 )2 ,
(x1 x2 )2 ( y1 y2 )2 ,
|
|
v r |
|
2 |
|
|||
sin |
1 |
|
|
|
|
. |
||
|
|
|
|
|||||
|
|
v |
|
r |
|
|
|
|
|
|
|
|
|
||||
Далее последовательно вычисляют скорости (6.5) и координаты (6.4) (табл. 6.1). После этого данные выводятся на график в виде двух зависимостей y f (x) .
|
|
|
|
|
|
Таблица 6.1 |
|
Координаты нахождения частиц в зависимости от времени |
|
||||
|
|
|
|
|
|
|
t, с |
|
x1, м |
y1, м |
x2, м |
|
y2, м |
0 |
|
–0.000011 |
0.000004 |
0.000011 |
|
–0.000004 |
|
|
|
|
|
|
|
2E+10 |
|
–1.08E-05 |
4E-06 |
1.08E-05 |
|
–4E-06 |
|
|
|
|
|
|
|
4E+10 |
|
–1.06E-05 |
4E-06 |
1.06E-05 |
|
–4E-06 |
|
|
|
|
|
|
|
6E+10 |
|
–1.04E-05 |
4E-06 |
1.04E-05 |
|
–4E-06 |
|
|
|
|
|
|
|
8E+10 |
|
–1.02E-05 |
4E-06 |
1.02E-05 |
|
–4E-06 |
|
|
|
|
|
|
|
1.6E+12 |
|
4.75305E-06 |
4.36E-06 |
–3.6E-06 |
|
–5.99E-06 |
|
|
|
|
|
|
|
3.78E+12 |
|
2.64123E-05 |
5.97E-06 |
–2.5E-05 |
|
–1.48E-05 |
|
|
|
|
|
|
|
3.8E+12 |
|
2.6612E-05 |
5.98E-06 |
–2.5E-05 |
|
–1.49E-05 |
|
|
|
|
|
|
|
3.84E+12 |
|
2.70114E-05 |
6.01E-06 |
–2.5E-05 |
|
–1.51E-05 |
|
|
|
|
|
|
|
30