

LS-Sb90325
.pdfМИНОБРНАУКИ РОССИИ
–––––––––––––––––––––––––––––––––––––
Санкт-Петербургский государственный электротехнический университет «ЛЭТИ»
––––––––––––––––––––––––––––––––––––
СИСТЕМЫ УПРАВЛЕНИЯ ГРЕБНЫМИ ЭЛЕКТРИЧЕСКИМИ УСТАНОВКАМИ
Методические указания к курсовой работе
Санкт-Петербург Издательство СПбГЭТУ «ЛЭТИ»
2013
1
УДК 629.12.066
Системы управления гребными электрическими установками: методические указания к курсовой работе / Сост.: В. Ю. Воскобович. СПб.: Изд-во СПбГЭТУ «ЛЭТИ», 2013. 46 с.
Рассмотрены вопросы синтеза оптимальной системы автоматического управления гребной электрической установкой переменно-постоянного тока с учетом действия случайного морского волнения и моделирования в системе Matlab синтезированной системы управления.
Предназначены для магистров направления 220400.68 – « Управление в технических системах» образовательной программы 220452.68 – « Автоматизированные системы управления морскими транспортными средствами».
Утверждено редакционно-издательским советом университета
в качестве методических указаний
СПбГЭТУ «ЛЭТИ», 2013
2
Введение
Зачастую методы определения структуры и параметров автоматических систем ГЭУ обеспечивают требуемое качество протекания переходных процессов в системе, имеющей возмущенное начальное состояние. Существуют практические задачи, которые могут быть сформулированы в такой постановке. Однако большую часть задач составляют те, в которых внешние воздействия действуют на систему непрерывно и стремятся вывести ее из заданного состояния. В таких случаях необходимо определить структуру и параметры автоматической системы, которая должна обеспечивать как требуемое качество протекания переходных процессов в системе, так и компенсацию внешних воздействий в установившемся состоянии.
Суда, оборудованные гребными электрическими установками (ГЭУ), в зависимости от назначения подвержены действию либо морского волнения, либо ледового воздействия. Так, сухогрузные суда океанского плавания, пассажирские лайнеры, танкеры большую часть общего времени работы судна эксплуатируются на длительных переходах в условиях морского волнения, причем 60 % этого времени интенсивность морского волнения составляет более 3 баллов. Ледоколы и суда ледового плавания значительную часть общего времени работы проводят в режимах взаимодействия со льдом.
Морское волнение является сложным колебательным движением поверхностного слоя воды в любом водоеме или водотоке с образованием водяных валов (волн). Волнение наиболее четко выражено на больших водных поверхностях. Оно может быть вызвано непостоянными (ветер, землетрясение и др.) и постоянными (приливы и отливы) причинами. Морское волнение – случайный процесс.
Известно, что при движении судна в условиях морского волнения или взаимодействия со льдом процесс изменения момента сопротивления на валу гребного электродвигателя носит случайный характер. Следовательно, проектировать системы автоматического управления (САУ) ГЭУ, поддерживающие постоянство мощности, частоты вращения ГЭД или какой-либо другой величины, необходимо с учетом случайного характера внешних воздействий.
В курсовой работе процесс проектирования СУ ГЭУ разделен на следующие этапы:
3

∙выбор математической модели гребной электрической установки ГЭУ;
∙выбор математической модели случайного внешнего воздействия (морского волнения) с заданными спектральными характеристиками;
∙синтез оптимальной системы управления ГЭУ в свободном движении;
∙синтез оптимальной системы управления ГЭУ при действии гармонического возмущения;
∙синтез оптимальной системы управления ГЭУ с учетом случайного внешнего воздействия;
∙моделирование случайного морского волнения;
∙моделирование синтезированных оптимальных систем управления при действии случайного морского волнения.
Методика проектирования системы управления гребной электрической установкой ориентирована на использование пакета Matlab и его приложе-
ния Simulink.
1. МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ГЭУ ПРИ ДЕЙСТВИИ МОРСКОГО ВОЛНЕНИЯ
1.1.Выбор математической модели гребной электрической установки
Вкурсовой работе производится проектирование системы управления ГЭУ переменно-постоянного тока с управляемым выпрямителем. Функциональная схема ГЭУ, состоящая из синхронного генератора, управляемого выпрямителя и ГЭД постоянного тока (СГ– В– Д), показана на рис. 1.1. Она включает в себя тепловой двигатель ТД (турбину или дизель), синхронный генератор СГ, управляемый выпрямитель В, ГЭД постоянного тока, воз-
ГЭД
Рис. 1.1
4
будитель генератора ВГ, возбудитель ГЭД – ВД, обмотку возбуждения ОВД, систему управления СУ, пост управления ПУ. Структурная схема разомкнутой системы, показана на рис. 1.2.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
KB |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ud |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
K T B |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
U y |
|
|
|
|
|
Ku |
|
Ki |
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
1 |
+ T y |
p |
|
|
|
|
1+Ta p |
|
|
|
|
|
|
|
|
2 |
+ Tm p |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K p
Kn
Рис. 1.2
Для решения задачи синтеза оптимальных систем управления ГЭУ, обеспечивающих оптимальное управление в свободном движении, при наличии внешних воздействий гармонического или случайного характера необходимо перейти из частотной области во временную и записать математическую модель ГЭУ в матричной форме.
|
nɺ |
|
|
−2 T |
|||
|
|
||||||
|
−K |
|
m |
||||
iɺ = |
n |
T |
|||||
|
|
|
|
|
a |
||
|
|
|
|
|
|||
uɺ |
|
|
0 |
|
|||
|
|
|
|||||
|
d |
|
|
|
|
||
Ki  Tm
Tm
−(KuK p + 1) Ta
Ta
0
0 |
|
|
n |
|
0 |
|
K |
T |
|
i |
|
+ |
0 |
u |
a |
|
|
|
|
|
−1 T |
|
ud |
KTB |
|||
|
y |
|
|
|
|
|
|
−KB |
||
U y + |
0 |
v. (1.1) |
|
|
|
0 |
|
Ty |
|
|
|
|
|
|
|
Рис. 1.3
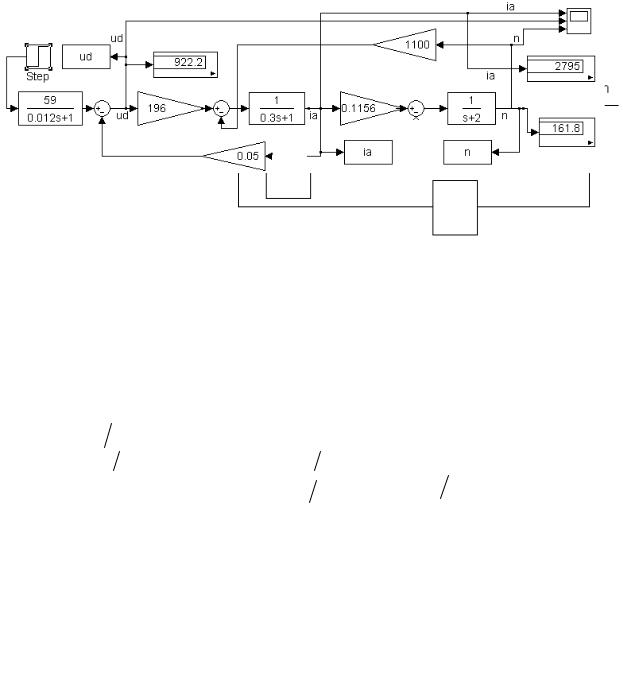
Определение установившихся значений переменных ГЭУ. Данное исследование проводится с целью определения требуемого значения задающего сигнала, обеспечивающего требуемое значение частоты вращения гребного электродвигателя (ГЭД) согласно заданию на курсовой расчет. Установившиеся значения тока якоря ГЭД и выпрямленного напряжения управляемого
5

15000 |
|
ia |
|
|
|
|
|
|
|
|
|
10000 |
|
|
|
|
|
5000 |
|
|
|
|
|
0 |
0.2 |
ud |
0.3 |
0.4 |
0.5 |
0.1 |
|||||
1000 |
|
|
|
|
|
500 |
|
|
|
|
|
0 |
0.2 |
|
0.3 |
0.4 |
0.5 |
0.1 |
n |
||||
200 |
|
|
|
|
|
|
|
|
|
|
|
100 |
|
|
|
|
|
0 |
0.2 |
|
0.3 |
0.4 |
0.5 |
0.1 |
|
||||
|
|
Рис. 1.4 |
|
|
|
выпрямителя также потребуются для расчета коэффициентов критерия оптимальности при синтезе системы управления. Определить установившиеся значения переменных ГЭУ можно используя приложение пакета Matlab – программу Simulink. Структурная схема моделирования ГЭУ с численными данными приведена на рис. 1.3, результаты моделирования ГЭУ – на рис. 1.4. Приборы, установленные на схеме моделирования, показывают следующие значения: n = 161.8 об/мин, ia = 2795 А, ud = 922.2 В. Частота вращения ГЭД n = 161.8 об/мин установлена в соответствии с заданием.
1.2. Выбор математической модели случайного внешнего воздействия
Волнение моря. При движении по взволнованной поверхности моря судно будет испытывать воздействие волн. Причинами возникновения волн на море являются ветер, подводные землетрясения, извержения подводных вулканов (цунами), обвалы огромных глыб льда, приливы и разность атмосферного давления. Волны имеют три характеристики: высоту, длину и период волны.
А
Вершина
h
Подошва
Рис. 1.5
Высота волны (h) – расстояние по вертикали от подошвы до вершины (гребня) волны. Ветровые волны обычно имеют высоту до 4, редко до 7…8 м. и совсем редко 18...20 м. Элементы волн показаны на рис. 1.5. Длина волны (А) – расстояние по горизонтали между двумя соседними вершинами или по-
6
дошвами волн. Обычная длина волны не превышает 400 м и редко достигает 800 м и более.
Отношение высоты волны к ее длине характеризует крутизну волны и
равняется у океанских волн 1/151/35 длины, у коротких морских волн – 1/10.
Период волны – промежуток времени, через который повторяются в ка-
кой-то точке моря, например у буя, одни и те же элементы волны, например
вершина. Период морских волн находится в пределах 5…13 с. В океанах пе-
риод волны больше, особенно зимой.
Скорость бега ветровых волн, т. е. скорость перемещения гребня волны,
возрастает с увеличением ее длины, достигая 50…80 км/ч.
Перемещения частиц воды под действием волн не происходит. Они ко-
леблются по орбитам, близким к круговым, подобно волнам, бегущим по ве-
ревке, один конец которой зажат в руке, а второй привязан. Наблюдаемое пе-
ремещение (дрейф) пены, предметов и судна при ветровом волнении вызвано действием ветра непосредственно на эти предметы и ветровым течением.
Морское волнение является случайным процессом.
Случайной функцией называется функция, которая в результате опыта
может принять тот или иной конкретный вид, неизвестно заранее – какой
именно [6]–[8]. Конкретный вид, принимаемый случайной функцией в ре-
зультате опыта, называется реализацией случайной функции. Если над слу-
чайной функцией произвести группу опытов, то получим группу, или «се-
мейство», реализаций этой функции [6]–[8].
Математическим ожиданием случайной функции X(t) называется не-
случайная функция mx(t), которая при каждом значении аргумента t равна математическому ожиданию соответствующего сечения случайной функции.
mx(t) = M[X(t)]. |
(1.2) |
По смыслу математическое ожидание случайной функции есть некоторая
средняя функция, около которой различным образом варьируются конкрет-
ные реализации случайной функции.
Аналогичным образом определяется дисперсия случайной функции X (t),
т. е. неслучайная функция Dx(t), значение которой для каждого t равно дис-
персии соответствующего сечения случайной функции |
|
Dx(t) = D[X(t)]. |
(1.3) |
7

Дисперсия случайной функции при каждом t xapaктеризует разброс возможных ее реализаций относительно среднего, иными словами – « степень случайности» случайной функции. Очевидно, что Dx(t) есть неотрицательная функция. Извлекая из нее квадратный корень, получим функцию σх(t) – сред-
нее квадратическое отклонение случайной функции:
σx(t) = Dx (t) . |
(1.4) |
Существует специальная функция, которая характеризует степень зависимости между сечениями случайной функции, относящимися к различным t. Эта характеристика называется корреляционной функцией (иначе – автокорреляционной функцией). Степень зависимости двух случайных функций X (t) и X(t') может быть в значительной мере охарактеризована их корреляционным моментом; он является функцией двух аргументов t и t' – корреляционной функцией [6]–[8].
Таким образом, корреляционной функцией случайной функции X(t)
называется неслучайная функция двух аргументов Kx(t, t'), которая при каж-
дой паре значений t, t' равна корреляционному моменту соответствующих сечений случайной функции.
Kx(t, t') = M[X(t)X(t')]. |
(1.5) |
||
Вместо корреляционной функции Kx(t, t') можно пользоваться нормиро- |
|||
ванной корреляционной функцией: |
|
|
|
rx(t, t') = |
K x(t, t') |
|
|
|
, |
(1.6) |
|
|
|||
|
σ x (t)σ x (t') |
|
|
которая представляет собой коэффициент корреляции величин X(t), X(t'). Случайные внешние воздействия являются случайными процессами, об-
ладающими свойствами стационарности и эргодичности.
На практике очень часто встречаются случайные процессы, протекаю-
щие во времени приблизительно однородно и имеющие вид непрерывных случайных колебаний вокруг некоторого среднего значения, причем ни сред-
няя амплитуда, ни характер этих колебаний не обнаруживают существенных изменений с течением времени. Такие случайные процессы называются ста-
ционарными (например, колебания напряжения в электрической осветитель-
ной сети, случайные шумы в радиоприемнике, процесс качки корабля и др.).
8
Случайная функция X(t) называется стационарной, если все ее вероят-
ностные характеристики не зависят от t:
mx = const; Dx = const; Kx(t, t + τ) = kx(τ), (1.7)
где Kx(t, t + τ) – это корреляционный момент двух сечений случайной функ-
ции, разделенных интервалом времени τ.
Эргодическое свойство случайной функции состоит в том, что каждая отдельная реализация случайной функции является как бы полномочным представителем всей совокупности возможных реализаций; одна реализация достаточной продолжительности может заменить при обработке множество реализаций той же общей продолжительности [6].
Если какой-либо случайный колебательный процесс представляется в виде суммы гармонических колебаний (гармоник) со случайными амплитудами, то спектром этого процесса называется функция, описывающая распределение амплитуд отдельных гармоник по частотам.
При расчете системы управления ГЭУ подверженной действию нерегулярного морского волнения будем предполагать, что в течение ограниченного промежутка времени (в среднем около 2–3 ч) можно рассматривать мор-
ское волнение как случайный стационарный колебательный процесс с узким спектром [8].
Спектральные представления широко используются при изучении морского волнения и порожденных им возмущающих сил, действующих на суда и корабли. Для возмущающих сил, имеющих своей первопричиной морское волнение, характерно наличие некоторой периодичности и поэтому для аппроксимации их широко используют корреляционную функцию, в нормированной форме имеющую вид
Rη(τ) = e |
−ατ |
|
α |
|
|
|
||
|
(cosβτ + β sin βτ); |
|
|
(1.8) |
||||
S (ω) = |
4α |
|
|
|
α2 + β2 |
|
. |
(1.9) |
π |
(α2 |
+ β2 + ω2 )2 − 4β2 |
|
|||||
|
ω2 |
|
||||||
Заметим, что, группируя по-иному члены в знаменателе, можно зависимость (1.9) представить также в следующих равносильных формах:
S (ω) = |
4α |
|
|
α2 + β2 |
|
|
= |
4α |
|
|
α2 + β2 |
|
|
. |
π |
|
(α2 − β2 |
+ ω2 )2 |
+ 4β2 |
|
π |
|
(−α2 |
− β2 + ω2 )2 |
+ 4α2 |
|
|||
|
|
ω2 |
|
ω2 |
||||||||||
9

При α → 0 корреляционная функция вырождается в косинусоиду, а энергетический спектр – в δ-функцию на частоте β. Таким образом, параметр β характеризует частоту периодического процесса, лежащего и основе случайной функции х(t), а параметр α характеризует степень «размытости», нерегулярности, «степень случайности» функции х(t). Характер х(t) зависит от соотношения между α и β. Если α/β мало, то х(t) напоминает синусоиду с медленно меняющейся амплитудой и фазой; с увеличением α/β периодичность сказывается все меньше и меньше.
Введем понятие спектральной плотности среднего квадрата случайного сигнала, поскольку средний квадрат не зависит от соотношения фаз суммируемых гармоник. Если под случайной функцией x(t) подразумевается электрическое напряжение или ток, то ее средний квадрат можно рассматривать как среднюю мощность, выделяемую в сопротивлении 1 Ом. Эта мощность распределена по частотам в некоторой полосе частот, зависящей от механизма образования случайного процесса. Спектральная плотность средней мощности представляет собой среднюю мощность, приходящуюся на 1 Гц при заданной частоте. Ее единица измерения определяется отношением мощности к полосе частот, т. е. является единицей измерения энергии1.
Для морского волнения характерны малые значения отношения α/β: оно колеблется в пределах от 0,15 до 0,25; чаще всего пользуются значением α/β = = 0,21, характерным для развитого волнения. Следовательно, спектральная плотность морского волнения имеет явно выраженный максимум. На рис. 1.6 и 1.7 изображены корреляционная функция и спектральная плотность мощности для зависимостей (1.8) и (1.9) при α/β = 0,21. В табл. 1.1 приведены данные, связывающие параметры α и β с высотой волн 3%-ной обеспеченности. Разумеется, зависимости (1.8) и (1.9), как и любые аналитические зависимости, только приближенно отражают спектральные характеристики реального волнения. На рис. 1.8 и 1.9 сопоставлены взятые из работы [5] экспериментальные спектральные характеристики реального волнения (рис. 1.8 – пятибалльное волнение в Каспийском море, рис. 1.9 – шестибалльное волнение в Атлантическом океане) и спектральные плотности мощности, вычисленные по формуле (1.9) для α/β = 0,21. Рисунки показывают, что зависимость (1.9) хорошо отображает характер реального волнения в области максимальных амплитуд энергетического спектра, т. е. там, где сосредоточена основная часть энергии волнения. В то же время на участках больших и малых частот степень
1 Андреевская Т. М. Содержание курса лекций. 2004.html. URL: http://jstonline.narod.ru/rsw/
10