

LS-Sb87958
.pdfМИНОБРНАУКИ РОССИИ
–––––––––––––––––––––––––––––––––
Санкт-Петербургский государственный электротехнический университет «ЛЭТИ»
–––––––––––––––––––––––––––––––––––––––
СИСТЕМЫ УПРАВЛЕНИЯ ПОДВИЖНЫМИ ОБЪЕКТАМИ
Методические указания к лабораторным работам по дисциплине
«Системы управления подвижными объектами»
Санкт-Петербург Издательство СПбГЭТУ «ЛЭТИ»
2012
УДК 681.5
Системы управления подвижными объектами: Методические указания к лабораторным работам по дисциплине «Системы управления подвижными объектами» / Сост.: А. А. Знаменский, В. В. Степанов. СПб.: Изд-во СПбГЭТУ
«ЛЭТИ», 2012. 27 с.
Содержат методику выполнения лабораторных работ, посвященных исследованию систем управления конечным состоянием. Системы управления рассматриваемого класса представляют собой сложные динамические системы, специфическими особенностями которых являются нестационарность и стохастичность.
Предназначены для студентов, обучающихся по направлению «Управление в технических системах».
Утверждено редакционно-издательским советом университета
в качестве методических указаний
© СПбГЭТУ «ЛЭТИ», 2012
2
Введение
К системам управления конечным состоянием (СУКС) относится большой класс систем управления, задача которых состоит в том, чтобы к определенному конечному моменту времени tк обеспечить заданное состояние объекта, представляемое совокупностью обобщенных координат x1(tк), …, xn(tк). Примерами таких систем являются: система автоматического управления самолетом в режиме захода на посадку, система автоматического управления ракетойносителем при выводе спутника на орбиту, система наведения ракеты и т. д.
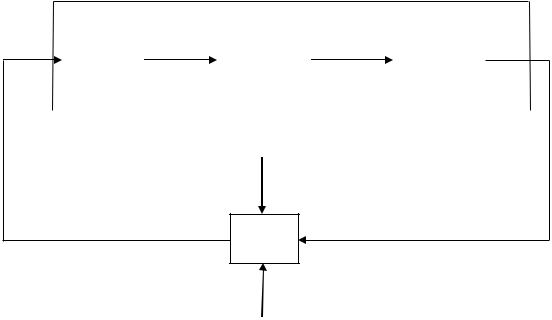
Из-за многообразия и разновидности элементов, входящих в СУКС (информационная подсистема (ИПС), подсистема формирования закона управления (ПФЗУ), подсистема угловой стабилизации (ПУС)), ее математическая модель представляет собой сложную нелинейную систему дифференциальных уравнений высокого порядка с существенно переменными коэффициентами со случайными функциями в правых частях и случайными начальными условиями. Функциональная схема СУКС представлена на рис. В.1, где КЗ – кинематическое звено; φ – угол наклона линии визирования цели; – угол рыскания объекта управления.
Стационарная часть СУКС
|
|
|
|
|
|
|
|
ИПС |
|
ПФЗУ |
|
ПУС |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Начальное положение объекта управления
xОУ , zОУ , ОУ
КЗ
Параметры движения цели
xц , zц , vц , qц
Рис. В.1
Задачей управления конечным состоянием является совмещение в заданный момент времени tк траекторий двух движущихся объектов, причем движение одного из объектов является управляемым, а другого – произвольным с параметрами vц, qц и не зависящим от первого. В дальнейшем первый
3
из объектов будем называть объектом управления (ОУ), а второй – целью (Ц). Точность управления конечным состоянием может характеризоваться значительным в момент времени tк вектором ошибки tк xц tк xОУ tк , где
xц tк и xОУ tк – значения в момент времени tк векторов фазовых коорди-
нат цели и объекта управления соответственно.
Когда полного совмещения траекторий движущихся объектов не требуется, а достаточным является лишь их пересечение, размерность вектораtк может быть существенно понижена. При линеаризации дифференциальных уравнений обычно исходят из допущения о равномерном и прямолинейном относительном движении вдоль одной из осей координат. При этом вектор ошибки tк будет определяться двумя проекциями на взаимноперпендикулярные плоскости. Если же при этом считать движение объекта по взаимно перпендикулярным направлениям независимым, то оценка конечного состояния может производиться скалярными величинами – проекциями tк , а процессы управления в двух плоскостях могут рассматриваться по отдельности. Таким образом, задача управления конечным состоянием перейдет в задачу управления конечным значением, которая в дальнейшем и будет рассматриваться. Когда конечное состояние характеризуется только одной из обобщенных координат tк , математическая модель системы состоит из линейной стационарной части и нестационарного звена, обозначенного КЗ на рис. В.1.
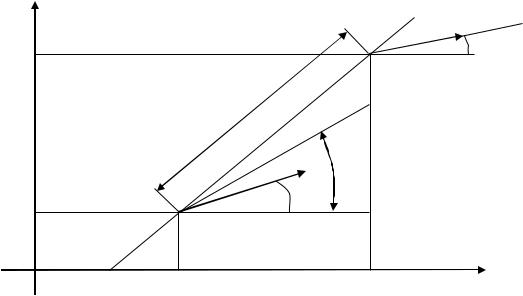
z |
vц |
Ц |
|
zц |
qц |
|
|
D |
|
vОУ
zОУ
ОУ

0 |
xОУ |
xц |
x |
Рис. В.2
4
Стационарная часть системы зависит от вида подсистем (рис. В.1), а нестационарное звено отражает взаимное движение объекта и цели и реализует кинематические связи между текущими линейными координатами ОУ и цели
иуглом визирования.
Влабораторных работах 1–4 рассматривается движение объекта в процессе самонаведения (СН) в проекциях на горизонтальную плоскость.
На рис. В.2 изображено взаимное положение движущегося объекта управления и цели в произвольный момент процесса СН, где обозначено: vОУ и vц – векторы скорости этих объектов; Ψ – угол пути; D – дистанция
между объектом и целью; xОУ, zОУ, xц, zц – декартовы координаты объекта
и цели, при этом система координат 0xz ориентирована произвольным образом на горизонтальной плоскости.
Лабораторная работа 1 ИССЛЕДОВАНИЕ ДИНАМИКИ СИСТЕМ ПРЯМОГО НАВЕДЕНИЯ
Цель работы: исследование влияния динамических параметров на устойчивость и точность процесса наведения.
1.1. Основные сведения
Запуск программы при выполнении лабораторных работ 1–4 осуществляется из среды Matlab7. В адресной строке (current directory) следует выбрать: D:\Метод\Степанов\Homing. Далее в командном окне необходимо ввести строку:
>> ChoiceRes
Появляется окно, предназначенное для выбора номера лабораторной работы (рис. 1.1).
При нажатии на клавишу «Оk» происходит смена окон, появляется окно для ввода номера варианта и выбора исследования в определённой лабораторной работе (рис. 1.2).
После ввода номера варианта, выбора исследования и нажатия на клавишу «Оk», появляется главное окно программы (рис. 1.3).
Кнопка «Пуск» служит для начала выполнения расчетов и вывода траекторий движения объекта – летательного аппарата (ЛА) и цели. Расчёт осуществляется при текущих параметрах системы, значения которых отображены в окне коэффициентов: D0 – начальная дистанция; qц – угол пути цели
Qц ; vц – скорость цели.
5
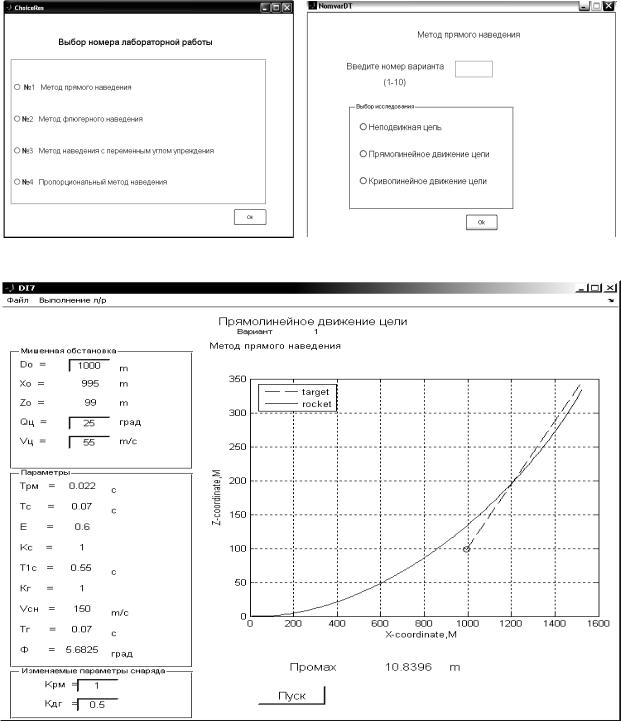
Рис. 1.1 |
Рис. 1.2 |
Рис. 1.3
В окне также отображены значения следующих величин: TРМ – постоянная времени рулевой машинки; Tс – постоянная времени объекта; – коэффициент демпфирования (Е); Kс – коэффициент передачи ДЗ; T1с – аэродинамическая постоянная времени; Kг – коэффициент усиления головки самонаведения; vсн – скорость объекта; Tг – постоянная времени головки наведения (ИЗ); – начальный угол визирования (Ф); KРМ – коэффициент
6
усиления рулевой машинки; KДГ – коэффициент усиления по производной
угла рыскания (демпфирующего гироскопа).
Ниспадающее меню «Выполнение л/р», при нажатии на которое появляются три вкладки: «Общие сведения»; «Порядок выполнения лабораторной работы»; «Функциональная схема». В этих вкладках можно подробно ознакомиться со справочной информацией об исследуемой системе и порядке выполнения лабораторной работы.
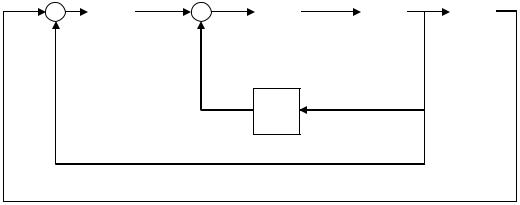
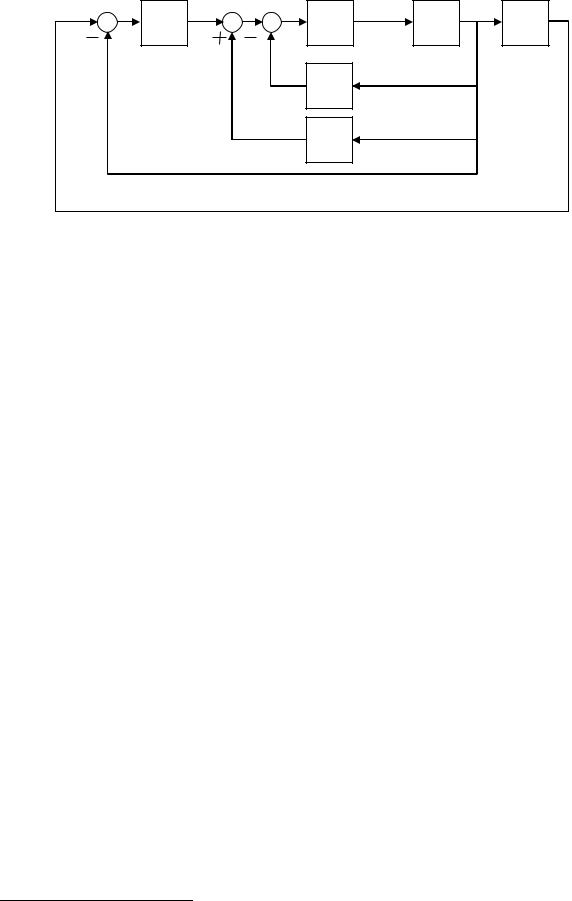
Функциональная схема системы прямого наведения, рассматриваемой в лабораторной работе 1, представлена на рис. 1.4, где обозначены: а) функциональные звенья системы: ИЗ – информационное звено; РМ – рулевая машинка; ДЗ – динамическое звено; ДГ – демпфирующий гироскоп; КЗ – кинематическое звено; б) переменные: φ – угол визирования; – угол рыскания;– положение рулей; Ψ – угол пути объекта; у – сигнал управления; uРМ –
сигнал на входе РМ; uДГ – сигнал на выходе ДГ; – ошибка управления.
|
|
|
|
у |
|
uРМ |
|
|
|
|
|
|
ИЗ |
|
РМ |
ДЗ |
КЗ |
||||||
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
uДГ
ДГ
Рис. 1.4
Математическая модель исследуемой системы
Стационарная часть
Динамическое звено:
WОУ p |
p |
|
|
|
|
Kc T1c p 1 |
. |
||
p |
|
|
p Tc2 p2 |
2 Tc p 1 |
|||||
|
|
|
|
|
|||||
Рулевая машинка: |
|
|
|
|
|
|
|
||
WРМ p |
p |
|
|
|
KРМ |
. |
|
||
uРМ p |
|
TРМ p 1 |
|
||||||
|
|
|
|
||||||
Нестационарная часть
Кинематическое звено:
p |
1 |
p ; |
|
||
1 T p |
||
|
1c |
|
zОУ vОУ sin ;
xц vц cos qц;
xОУ vОУ cos ;
7

Демпфирующий гироскоп:
|
p |
uДГ p |
|
K |
|
|
|
zц vц sin qц; |
|
|
||||||
W |
|
ДГ |
p . |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
||||||||||
ДГ |
|
|
p |
|
|
|
|
|
|
D xц |
xОУ 2 zц zОУ 2 ; |
|||||
|
|
|
|
|
|
|
|
|
|
|||||||
Информационное звено: |
|
|
|
|
|
|
|
|||||||||
WИЗ |
p |
у p |
|
|
|
Kг |
|
. |
arcsin |
zц zОУ |
. |
|
||||
|
p |
Tг p |
|
D |
|
|||||||||||
|
|
|
|
|
1 |
|
|
|
|
|||||||
1.2. Программа работы
Метод прямого наведения реализует простейший закон наведения ЛА на цель, при котором линия визирования цели должна совпадать с продольной осью ЛА. Данный закон наведения выражается равенством φ = .
Лабораторная работа состоит из четырех пунктов исследований.
1. Исследование влияния динамических параметров на точность наве-
дения. Для заданного преподавателем варианта параметров исследуемой системы и исходных данных мишенной обстановки (см. приложение) определите значения коэффициентов KРМ и KДГ , обеспечивающих минимальный
промах при наведении на неподвижную цель.
Рекомендация: попробуйте сначала установить KРМ = 1. Меняя KДГ ,
добейтесь локально-минимального промаха. Далее, не изменяя текущего значения KДГ , попытайтесь найти оптимальное значение и для KРМ , обеспечи-
вающее минимальный промах.
После того, как вы достигли, на ваш взгляд, минимального промаха, запишите в файл изображение траекторий движения ЛА и цели и представьте их в отчете.
2. Получение зависимости промаха от начальной дистанции наведения при выбранных оптимальных параметрах системы. Цель неподвижна. Для выполнения данного пункта вам достаточно будет четырех значений начальной дистанции D0 наведения: первое – исходное значение, в качестве трех других возьмите значения 25, 50 и 75 % от исходного. Запишите получаемые значения промаха и представьте в отчете таблицу и график зависимости промаха от начальной дистанции наведения.
8

3. Исследование влияния курсового угла цели qц на характер процесса
наведения. Установите заданную скорость движения цели и при выбранных оптимальных параметрах системы исследуйте зависимость промаха от величины qц , изменяя значение последнего от 0 до 360° с шагом, например, 45°.
Представьте в отчете одну из полученных траекторий движения ЛА и цели, таблицу и график зависимости промаха от qц на основании результа-
тов выполнения данного пункта программы.
4. Исследование влияния параметров криволинейного движения цели на характер процесса наведения. Исследуйте величину промаха от радиуса циркуляции цели (R) в одном из предложенных направлений, изменяя R в пределах от 100 до 1200 м.
В отчете представьте одну из полученных при изменении R траекторий движения ЛА и цели, а также таблицу и график зависимости значения промаха от R.
1.3.Контрольные вопросы
1.Какие достоинства и недостатки имеет метод прямого наведения?
2.Дайте качественное объяснение зависимости промаха от начальной дистанции наведения.
Лабораторная работа 2 ИССЛЕДОВАНИЕ ДИНАМИКИ СИСТЕМ ФЛЮГЕРНОГО НАВЕДЕНИЯ
Цель работы: исследование влияния динамических параметров на устойчивость и точность процесса наведения.
1.1. Основные сведения
Функциональная схема системы флюгерного наведения представлена на рис. 2.1, где обозначены: а) функциональные звенья системы: ИЗ – информационное звено; РМ – рулевая машинка; ДЗ – динамическое звено; ДГ – демпфирующий гироскоп; КЗ – кинематическое звено; ФД – флюгерный датчик; б) переменные: β – угол скольжения1.
1 Остальные обозначения – те же, что и в лабораторной работе 1.
9
|
|
у |
uРМ |
|
|
|
|
|
|
||||
|
|
ИЗ |
|
РМ |
ДЗ |
КЗ |
|
|
uДГ |
|
|
ДГ |
ФД |
Рис. 2.1
Математическая модель исследуемой системы
Флюгерный датчик1: W |
p |
p |
|
K T1c p |
. |
|
|
||||
ФД |
|
p |
T1c p 1 |
||
|
|
||||
2.2. Программа работы
Метод флюгерного наведения относится к большой группе методов погони. Для методов наведения данной группы необходимо, чтобы линия визирования цели в процессе движения ЛА занимала вполне определенное положение относительно вектора скорости. Самым простым является случай, когда вектор скорости ЛА направлен на цель. Такой метод называется методом флюгерного наведения. Для этого метода закон наведения выражается равенством φ = – β.
Лабораторная работа состоит из четырех пунктов исследований.
1. Исследование влияния динамических параметров на точность наве-
дения. Для заданного преподавателем варианта параметров исследуемой системы и исходных данных мишенной обстановки выберите значения коэффициентов KРМ и KДГ , обеспечивающих минимальный промах при наведе-
нии на неподвижную цель.
После того, как вы достигли, на ваш взгляд, минимального промаха, запишите в файл изображение траекторий движения ЛА и цели и представьте их в отчете.
2. Получение зависимости промаха от начальной дистанции наведения при выбранных оптимальных параметрах системы. Цель неподвижна. Для выполнения данного пункта вам достаточно будет четырех значений началь-
1 Остальные составляющие модели – те же, что и в лабораторной работе 1.
10