

LS-Sb87958
.pdfной дистанции D0 наведения: первое – исходное значение, в качестве трех других возьмите значения 25, 50 и 75 % от исходного. Запишите получаемые значения промаха и представьте в отчете таблицу и график зависимости промаха от начальной дистанции наведения.
3. Исследование влияния курсового угла цели qц на характер процесса
наведения. Установите заданную скорость движения цели и при выбранных оптимальных параметрах системы исследуйте зависимость промаха от qц ,
изменяя значение последнего от 0 до 360° с шагом, например, 45°. Представьте в отчете одну из полученных траекторий движения ЛА и
цели, таблицу и график зависимости промаха от qц на основании результа-
тов выполнения данного пункта программы.
4. Исследование влияния параметров криволинейного движения цели на характер процесса наведения. Исследуйте величину промаха от радиуса циркуляции цели (R) в одном из предложенных направлений, изменяя R в пределах от 100 до 1200 м.
В отчете представьте одну из полученных при изменении R траекторий движения ЛА и цели, а также таблицу и график зависимости значения промаха от R.
2.3.Контрольные вопросы
1.Какие достоинства и недостатки имеет метод флюгерного наведения?
2.Сравните полученные результаты с результатами лабораторной работы 1.
Лабораторная работа 3 ИССЛЕДОВАНИЕ ДИНАМИКИ СИСТЕМ С ПЕРЕМЕННЫМ УГЛОМ УПРЕЖДЕНИЯ
Цель работы: исследование влияния динамических параметров на устойчивость и точность процесса наведения.
3.1. Основные сведения
Функциональная схема системы наведения с переменным углом упреждения представлена на рис. 3.1, где обозначены: а) функциональные звенья системы: ИЗ – информационное звено; РМ – рулевая машинка; ДЗ – динамическое звено; ДГ – демпфирующий гироскоп; КЗ – кинематическое звено; СГ –
11
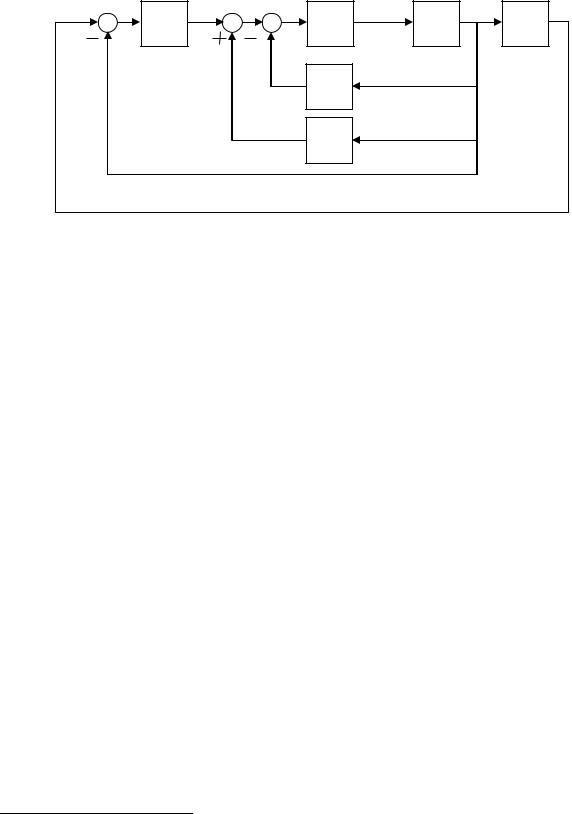
свободный гироскоп; б) переменные и параметры: – угол упреждения; KСГ –
коэффициент передачи свободного гироскопа1.
|
у |
uРМ |
|
|
|
|
|
|
|||
|
ИЗ |
|
РМ |
ДЗ |
КЗ |
|
|
uДГ |
|
|
ДГ |
СГ |
Рис. 3.1
Математическая модель исследуемой системы
Свободный гироскоп2: W |
p |
p |
K |
|
. |
|
СГ |
||||
|
|||||
СГ |
|
СГ p |
|
|
|
|
|
|
|
|
3.2. Программа работы
Метод наведения с переменным углом упреждения относится к методам погони. Переменный угол упреждения формируется в системе с использованием свободного гироскопа, расположенного в контуре положительной обратной связи K . Тогда закон наведения запишется так:
K .
При определенных условиях коэффициент пропорциональности K
можно считать равным KСГ .
Лабораторная работа состоит из пяти пунктов исследований.
1. Исследование влияния динамических параметров на точность наве-
дения. Для заданного преподавателем варианта параметров исследуемой системы и исходных данных мишенной обстановки выберите значения коэффициентов KРМ и KДГ , обеспечивающих минимальный промах при наведе-
нии на движущуюся с заданной скоростью цель, при этом курсовой угол це-
ли равен 90° (270°).
1Остальные обозначения – те же, что и в лабораторной работе 1.
2Остальные составляющие модели – те же, что и в лабораторной работе 1.
12
После того, как вы достигли, на ваш взгляд, минимального промаха, запишите в файл изображение траекторий движения ЛА и цели и представьте их в отчете.
2. Получение зависимости промаха от начальной дистанции наведения при выбранных оптимальных параметрах системы, полученных при выпол-
нении п. 1. Цель движется с заданной скоростью с курсовым углом 90° (270°). Для выполнения данного пункта вам достаточно будет четырех значений начальной дистанции D0 наведения: первое – исходное значение, в качестве трех других возьмите значения 25, 50 и 75 % от исходного. Запишите получаемые значения промаха и представьте в отчете таблицу и график зави-
симости промаха от начальной дистанции наведения.
3. Исследование влияния курсового угла цели qц на характер процесса
наведения. Для выбранных оптимальных параметров системы при заданной скорости движения цели исследуйте зависимость значения промаха от различных qц (в пределах от 90 до 270° с шагом, например, 45°).
Представьте в отчете одну из полученных траекторий движения ЛА и цели, таблицу и график зависимости промаха от qц на основании результа-
тов выполнения данного пункта программы.
4.Исследование влияния параметров криволинейного движения цели на характер процесса наведения. Исследуйте величину промаха от радиуса циркуляции цели (R) в одном из предложенных направлений, изменяя R в пределах от 100 до 1200 м.
В отчете представьте одну из полученных при изменении R траекторий движения ЛА и цели, а также таблицу и график зависимости значения промаха от R.
5.Получение зависимости промаха от начальной дистанции наведения при выбранных оптимальных параметрах системы (случай неподвижной це-
ли). Установите значения оптимальных коэффициентов KРМ и KДГ , полу-
ченные при выполнении п. 1. Скорость цели равна нулю.
Исследуйте влияние начальной дистанции до цели D0 на величину промаха (5–6 значений).
В отчете представьте одну из полученных траекторий движения ЛА и цели, а также таблицу и график зависимости значения промаха от дистанции.
13

3.3.Контрольные вопросы
1.Какие достоинства и недостатки имеет метод наведения с переменным углом упреждения?
2.Сравните полученные результаты с результатами лабораторных работ 1
и2. В чем их качественное отличие?
Лабораторная работа 4 ИССЛЕДОВАНИЕ ДИНАМИКИ
СИСТЕМ ПРОПОРЦИОНАЛЬНОГО НАВЕДЕНИЯ
Цель работы: исследование влияния динамических параметров на устойчивость и точность процесса наведения.
4.1. Основные сведения
Функциональная схема системы пропорционального наведения представлена на рис. 4.1, где обозначены: а) функциональные звенья системы: ИЗ – информационное звено; РМ – рулевая машинка; ДЗ – динамическое звено; ДГ – демпфирующий гироскоп; КЗ – кинематическое звено1.
|
|
у |
|
uРМ |
|
|
|
|
|
ИЗ |
|
РМ |
ДЗ |
КЗ |
|||||
|
|
||||||||
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
uДГ
ДГ
Рис. 4.1
Математическая модель исследуемой системы
Информационное звено2: W |
p |
у p |
|
1 |
|
K |
|
p . |
|
|
|
г |
|||||
ИЗ |
|
p |
Tг p 1 |
|
|
|||
|
|
|
|
|
||||
4.2. Программа работы
Метод пропорционального наведения также относится к методам погони, являясь их наиболее общей формой выражения. Закон наведения данного метода можно записать в виде K , где K – навигационная постоянная.
1Остальные обозначения – те же, что и в лабораторной работе 1.
2Остальные составляющие модели – те же, что и в лабораторной работе 1.
14

Лабораторная работа состоит из пяти пунктов исследований.
1. Исследование влияния динамических параметров на точность наве-
дения. Цель движется с заданной скоростью с курсовым углом 90° (270°). Выберите оптимальные параметры системы ( KРМ и KДГ ), обеспечивающие минимальный промах, для чего необходимо: установить некоторое значения коэффициента KРМ ; вычислить соответствующее значение коэффициента KДГ для навигационной постоянной K = 3. Коэффициенты KРМ и KДГ свя-
заны с навигационной постоянной K следующим образом:
v K
K v 1 KРМKДГ ;
vvОУ cos vц cos qц.ОУ РМ
Если φ0 = 0 и qц = 90° (270°), то
K KРМ .
1 KРМKДГ
После того, как вы достигли, на ваш взгляд, минимального промаха, запишите в файл изображение траекторий движения ЛА и цели и представьте их в отчете.
2. Получение зависимости промаха от начальной дистанции наведения при выбранных оптимальных параметрах системы. Для выполнения данно-
го пункта вам достаточно будет четырех значений начальной дистанции ( D0 ) наведения: первое – исходное значение, в качестве трех других возьмите значения 25, 50 и 75 % от исходного.
Цель движется с заданной скоростью с курсовым углом 90° (270°). Запишите получаемые значения промаха и представьте в отчете таблицу
играфик зависимости промаха от начальной дистанции наведения.
3.Исследование влияния динамических параметров на точность наве-
дения при различных курсовых углах цели qц . Для различных qц (в преде-
лах от 90 до 270° с шагом, например, 45°) определите минимальный промах, изменяя значения коэффициентов KРМ и KДГ . Определите значения нави-
гационной постоянной для полученных коэффициентов KРМ и KДГ .
15
Представьте в отчете одну из полученных траекторий движения ЛА и цели, таблицу и график зависимости промаха и навигационной постоянной K от qц на основании результатов выполнения данного пункта программы.
4.Исследование влияния параметров криволинейного движения цели на характер процесса наведения. Исследуйте величину промаха от радиуса циркуляции цели (R) в одном из предложенных направлений, изменяя R в пределах от 100 до 1200 м.
В отчете представьте одну из полученных при изменении R траекторий движения ЛА и цели, а также таблицу и график зависимости значения промаха от R.
5.Получение зависимости промаха от начальной дистанции наведения при выбранных оптимальных параметрах системы (случай неподвижной цели).
Установите значения оптимальных коэффициентов KРМ и KДГ , полученные
при выполнении п. 1. Скорость цели равна нулю.
Исследуйте влияние начальной дистанции до цели D0 на величину промаха (5–6 значений).
В отчете представьте одну из полученных траекторий движения ЛА и цели, а также таблицу и график зависимости значения промаха от дистанции.
4.3.Контрольные вопросы
1.Какие достоинства и недостатки имеет метод пропорционального наведения ?
2.Сравните полученные результаты с результатами лабораторных работ 1–3.
Лабораторная работа 5 ИССЛЕДОВАНИЕ СИСТЕМЫ АВТОМАТИЧЕСКОГО
УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ПОСАДКЕ
Цель работы: исследование систем автоматической посадки самолета при движении по «глиссаде» с учетом влияния «сдвига» ветра.
5.1. Основные сведения
Под «глиссадой» понимается прямолинейная траектория движения самолета в вертикальной плоскости, соединяющая точку начала захода на посадку и расчетную точку приземления.
16
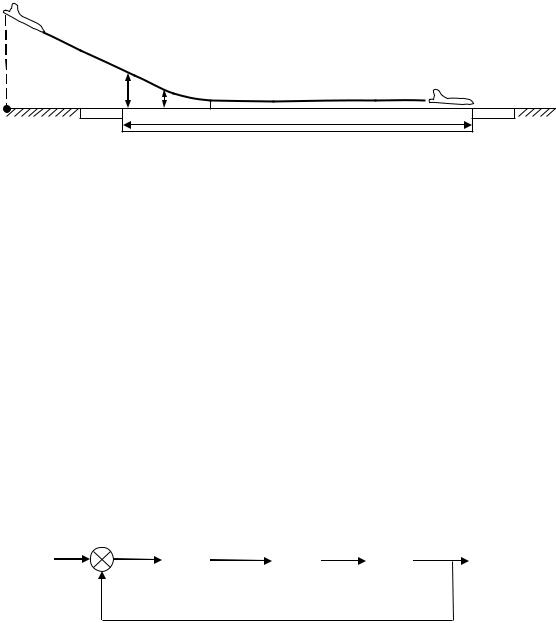
На рис. 5.1 обозначены: ДРМ – дальний радиомаяк, задающий начало движения по глиссаде; ГРМ – глиссадный радиомаяк, задающий расчетную точку приземления; БРМ – ближний радиомаяк, задающий начало управления от высотомера (этот режим в данной лабораторной работе не рассматривается); ВПП – взлетно-посадочная полоса.
|
D0 vctk |
|
|
|
vпл |
|
|
|
г |
v 0 |
|
ДРМ |
|
||
БРМ |
ГРМ |
||
|
|||
|
|
ВПП |
|
|
|
Рис. 5.1 |
Основным фактором, вызывающим отклонение траектории движения самолета от глиссады, является сдвиг ветра – изменение в пространстве скорости и направления ветра. Сдвиг ветра может привести к изменению скорости полета самолета, что при скорости близкой к критической, может вызвать аварийную ситуацию.
Одним из основных способов управления скоростью полета является изменение тяги двигателей, что в автоматическом режиме осуществляется с помощью автомата тяги (автомата скорости).
Функциональная схема автомата скорости представлена на рис. 5.2, где обозначены: vз, v – заданная и текущая скорости полета; Р – тяга двигателей; δу – сигнал управления движением; БУ – блок управления; Дв – двигатель; С – самолет.
vз |
|
δу |
|
Р |
|
v |
|||
БУ |
Дв |
С |
|||||||
|
|
|
|
|
|
||||
v |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Рис. 5.2
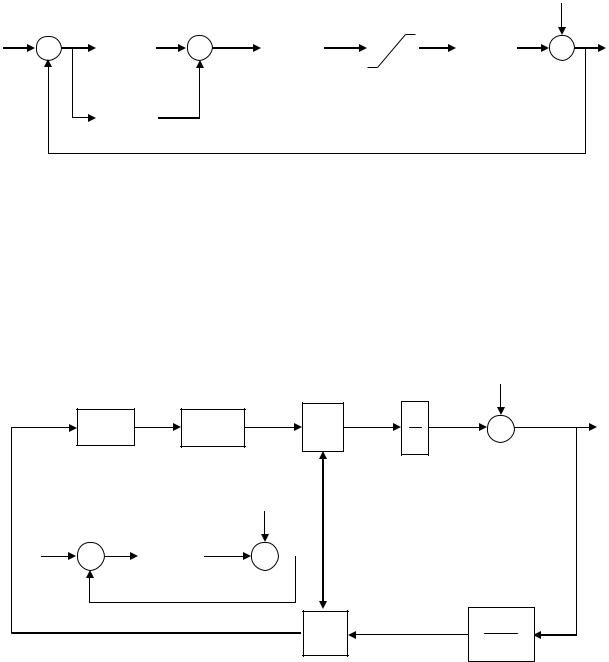
В лабораторной работе исследуется астатический автомат скорости, структурная схема которого представлена на рис. 5.3, где обозначены: Kд и Kс –
коэффициенты передачи двигателя и самолета; Tд и Tс – постоянные време-
ни; vсх – составляющая сдвига ветра по оси x; v – суммарная скорость.
17
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
vcх |
vз |
|
|
|
|
|
у |
|
Kд |
|
|
|
|
|
|
|
Kc |
|
v |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
K1 |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Tc p 1 |
|
|||
|
|
|
|
|
|
T 1 |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
д |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
p |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 5.3 |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
Общая структурная схема системы с учетом сдвига ветра и автомата |
||||||||||||||||||
скорости приведена |
на рис. 5.4, |
где обозначены: |
Wак p – |
передаточная |
|||||||||||||||
функция автопилотного контура; Wас p – передаточная функция разомкну-
той части автомата скорости; БП – блок перемножения; БД – блок деления; Kпр – коэффициент передачи радиоприемника; h – высота; г – угол визиро-
вания, определяющий направление на глиссадный радиомаяк.
г |
Kпр |
Wак p |
|
|
БП |
||
|
|
|
vcх |
Vз |
|
|
v |
||
Wас p |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
БД |
Рис. 5.4
|
h0 |
1 |
h |
|
|
p |
|
1
tk t
В структурной схеме реализованы следующие кинематические соотношения:
h h |
1 |
v , |
|
|
|
h |
|
, |
|
|
|
|
t |
|
t |
||||
0 |
p |
г |
|
v |
k |
|
|||
|
|
|
|
|
|
|
|
|
|
где – угол наклона траектории.
5.2. Программа работы
Все файлы с разрешением *.mdl открывать в программе Mathlab версии 7.0 и старше.
18
1. Исследование «идеальной посадки» (отсутствует сдвиг ветра скорость самолета постоянная). В исходную систему без автомата скорости (файл sh_1.mdl) следует ввести данные, согласно своему варианту (табл. 5.1). Произвести моделирование системы и определить точку условного нуля (расчетная точка приземления или высота самолета (h tk 0) в момент времени tk ). Сохранить для представления в отчете графики траектории, вертикальной скорости, угла тангажа и угла атаки.
Таблица 5.1
Варианты начальных условий
№ варианта (n) |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
|
|
|
|
|
|
|
|
|
|
Время моделирования tk , с |
89 |
91 |
93 |
96 |
98 |
100 |
102 |
105 |
107 |
109 |
Начальная высота (h0), м |
400 |
410 |
420 |
430 |
440 |
450 |
460 |
470 |
480 |
490 |
Самолет движется со скоростью vз = 85 м/с; начальный угол визирования, определяющий направление на глиссадный радиомаяк, г = 3º.
2. Исследование автоматической посадки под влиянием сдвига ветра без автомата скорости. В исследованную ранее схему включить последовательно параметры сдвига ветра (табл. 5.2) и провести моделирование (n – номер варианта).
|
|
Таблица 5.2 |
|
Параметры сдвига ветра |
|
|
|
|
Момент приложения |
Скорость ветра, м/с |
|
сдвига ветра, с |
Направление положительное |
Направление отрицательное |
10 + n |
5 |
5 |
40 + n |
10 |
10 |
70 + n |
15 |
15 |
Результаты отклонения самолета в конечный момент времени от условного нуля = h tk 0 – h tk свести в таблицу по примеру (табл. 5.3).
|
|
|
|
|
|
Таблица 5.3 |
|
Пример таблицы результатов |
|
|
|
||
|
|
|
|
|
||
Величина и момент |
Отклонение высоты ЛА от условного нуля ( ), м |
|||||
|
|
|
|
|
|
|
Система без автомата |
|
Система с автоматом |
||||
приложения |
|
|||||
скорости (п. 2) |
|
|
скорости (п. 4) |
|||
воздействия, м/с; с |
|
|
||||
+ |
– |
|
+ |
|
– |
|
|
|
|
||||
5; 10 |
–12 |
+18 |
|
–5 |
|
+2 |
– |
– |
– |
|
– |
|
– |
Проследить за изменением основных наблюдаемых переменных. Три любых графика траектории совместить по одному с графиком траектории из п. 1 и представить в отчете.
19
3.Исследование астатического автомата скорости. Определить опти-
мальные параметры ПИ-регулятора автомата скорости (файл sh_2.mdl). Оптимальным будем считать переходный процесс с максимальным быстродействием и без перерегулирования. Рекомендуемый диапазон изменения параметров регулятора: пропорциональная составляющая (Iv1) [0.5; 10], интегральная составляющая (Iv) [0.2; 3].
Графики переходного процесса с оптимальными параметрами представить в отчете.
4.Исследование автоматической посадки под влиянием сдвига ветра с автоматом скорости. Ввести начальные условия своего варианта (табл. 5.1)
ипараметры автомата скорости, определенные в п. 3, в модель и аналогично п. 2 исследовать систему под влиянием сдвига ветра (файл sh_3.mdl) .
Результаты отклонения самолета от условного нуля в конечный момент времени = h tk 0 – h tk свести в таблицу по примеру (табл. 5.3).
5.3.Контрольные вопросы
1.Каким образом зависит величина расчетной точки приземления самолета от момента приложения сдвига ветра?
2.Каким образом зависит величина расчетной точки приземления самолета от скорости и направления сдвига ветра?
3.Какова роль автомата скорости в формировании требуемой траектории самолета при посадке?
Лабораторная работа 6 ИССЛЕДОВАНИЕ ДВУМЕРНОЙ СЛЕДЯЩЕЙ СИСТЕМЫ
Цели работы: определение переходных характеристик двумерной системы и исследование влияния параметров системы на качество переходных процессов.
6.1. Основные сведения
Среди двумерных систем автоматического управления (САУ) важный класс образуют системы с двумя идентичными каналами и антисимметричными перекрестными связями. Сюда относится большинство следящих систем углового сопровождения, пространственных систем гиростабилизации и ряд других устройств. Такого рода системы весьма просто и компактно ис-
20