

Sb95726
.pdfгде вектор управления u = u (t) является выходным сигналом линейного блока
u = Kax '+(B0 + Kb )u' . |
(4.3) |
Здесь Ka, Kb − настраиваемые матрицы соответствующих размерностей,
u'= z + K1 r + g, |
(4.4) |
где r = r(t) − вектор входных воздействий на объект управления; g = g(t) − вектор линейного закона обратной связи g = K 2x'. Алгоритм адаптивной компен-
сации имеет вид z = −B0+(Kax' +Kbu'), где B0+ - псевдоинверсия (псевдообрат-
ная для прямоугольных матриц), B0+ =(B0т B0 )-1B0т .
Матрицы K1, K 2 выбраны так, чтобы замкнутая система соответствовала описанию эталонной модели, т. е. B0K1 = Bm, A0 + B0K 2 = Am . Матрица G выбирается из обеспечения гурвицевости матрицы A0 − GC; если A0 − гурвицева, то можно взять G = 0.
Уравнение ошибки (e = e(t), e = x −x' ) , исходя из уравнений (4.1) - (4.3),
имеет вид |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
e = (A −GC)e + (A − A0 Ka )x' + (B − B0 −Kb ) u'. |
|
(4.5) |
||||||||||||||||||
Цель адаптивной идентификации |
|
lim |
|
e |
|
|
|
= 0 достигается при выполнении |
||||||||||||
|
|
|
|
|||||||||||||||||
соотношений lim K |
|
= A − |
A ; |
|
|
t→∞ |
|
|
|
|
− |
|
|
. В результате адаптивной |
||||||
a |
lim |
K |
b |
= B |
|
|
|
B |
0 |
|||||||||||
t→∞ |
|
0 |
|
t →∞ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
идентификации имеют место |
K |
a |
→ K o иK |
b |
→ K o |
, так что |
A − A |
= K o , |
||||||||||||
|
|
|
|
|
a |
|
|
|
|
|
|
|
b |
|
0 |
a |
||||
B − B0 = Kbo .
21

Уравнение (4.5) можно записать в виде
e = (A −GC)e + δax '+δbu' , |
(4.6) |
где Ka0 −Ka = δa, Kb0 −Kb = δb .
|
|
|
|
|
ЭМ |
xЭМ |
|
|
|
|
|
|
|
|
- |
|
u' |
|
|
x |
|
ПИ |
B |
∫ |
|
||
|
z- |
|
||||
r |
ε |
|
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A0 |
- |
|
|
|
|
|
x ' |
|
|
|
|
B0+ |
B0 |
∫ |
|
|
|
|
|
 Кb
Кb 

 Ка
Ка 
|
|
|
γb ∫ |
γа ∫ |
|
Алгоритмы 
адаптации e
Рис. 4.1
Основой построения алгоритмов параметрической настройки является метод функций Ляпунова. Выберем функцию Ляпунова в виде
V(e,δ) = eтPe + tr(δΓ -1δт), где δт = [δaт δbт ]; Γ = diag(Γa Γb ), Γa, Γb > 0;
P = P т, P > 0 - решение матричного уравнения типа AтP + PA = −Q, A − гурвицева. Производная функции Ляпунова в силу уравнения (4.6) имеет вид
|
(e,δ) = −e |
т |
|
-1 |
т |
) + 2 tr(Pev |
т |
δ |
т |
), |
(4.7) |
V |
|
Q e + 2 tr(δΓ |
δ |
|
|
|
где − Q = (A0 −GC)тP + P(A0 − GC), Q = Qт,Q > 0, v т = [x т r т].
22
23
Алгоритмы параметрической настройки
δa = − Ka = − P e x 'т Γa; δb = − Kb = − P e u'т Γb.
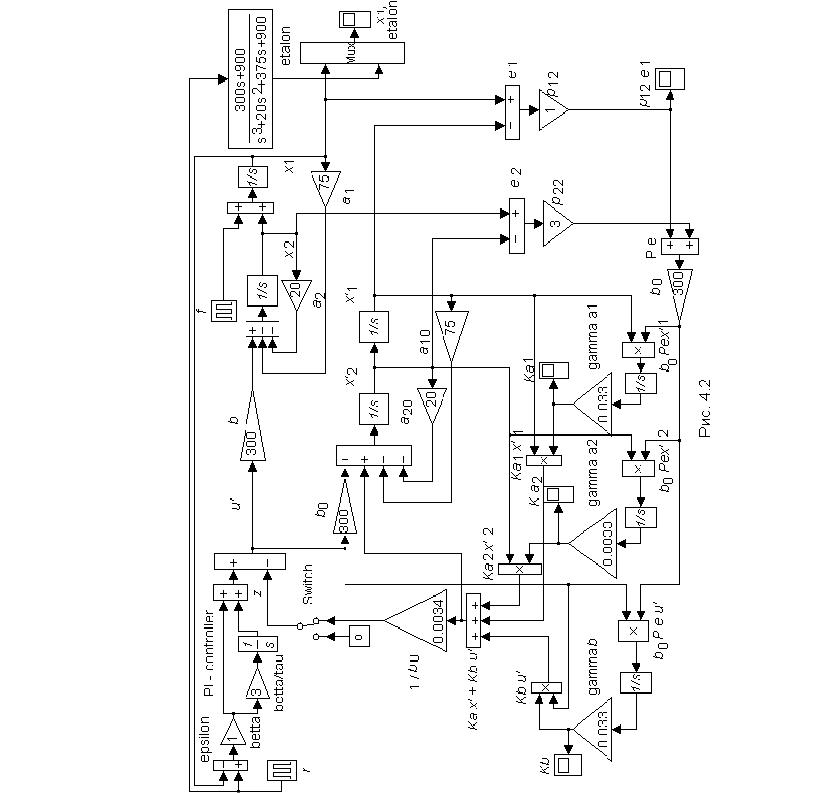
Так как в (4.7) только первое слагаемое отрицательно определено, а сумма остальных равна нулю, то в результате действия адаптивных алгоритмов получаем асимптотическую устойчивость по переменной e(t) и устойчивость по переменным δa(t), δb(t). Блок-схема адаптивной системы с настраиваемой моделью и параметрической настройкой приведена на рис. 4.1, структурная схема − на рис. 4.2.
4.2Программа работы
Всилу того, что система на рис.4.2 − одновходная-одновыходная, вместо многомерного закона обратной связи (матрицы K1, K 2 ) использован ПИ-
регулятор (PI − controller на рис.4.2) с описанием g = 3∫ε(t)dt + ε(t), ε(t) = r(t) − y(t) (ε − epsilon на рис. 4.2).
1.Построение структурной схемы, представленной на рис. 4.2.
2.Ознакомление с работой основного контура при изменении параметров объекта управления относительно номинальных значений (b = 300, a1 =
75, a2 = 20 ). Цель опыта − оценить изменение качества переходных процессов неадаптивного контура при вариации его параметров. Для этого взять некоторый вариант значений параметров b, a1, a2 из интервалов [10 ≤ b ≤ 1000],
[25 ≤ a1 ≤ 200], [5 ≤ a2 ≤ 100] и сравнить реакции системы на воздействие типа "меандр" (см. предыдущую работу) с номинальными и измененными параметрами. Результат − графики переходных процессов.
3. Исследование адаптивной системы с параметрической настройкой. Цель опыта − оценить эффективность параметрической настройки при изменениях параметров объекта управления и отсутствии внешнего возмущения. При f = 0 и изменении параметров объекта управления из п. 1 подобрать
24
Γb = γb, Γa = [γa1 γa2 ] (рекомендуемые − γb = 0.033, γa1 = 0.0033, γa2 = 0.033) и
убедиться в адаптивности системы при возбуждении системы входным сигна-
лом типа "меандр" (γb = gamma b, γa1 = gamma a1, γa2 = gamma a2) . Резуль-
тат − графики переходных процессов.
4. Определение полосы пропускания адаптивной и неадаптивной систем. Цель опыта − определить соотношение значений полосы пропускания адаптивной и неадаптивной системы. При любых неноминальных значениях параметров объекта управления (по указанию преподавателя) и f = 0 в режиме синусоидального входного воздействия определить полосу пропускания основного контура (частота, при которой уровень выходного сигнала достигает 0.707). Результат − указать максимальную граничную частоту полосы пропускания.
5. Исследование адаптивной системы с учетом воздействия на нее возмущения. Цель опыта − оценить эффективность адаптивного управления в условиях внешних возмущений. Момент времени приложения возмущения − после окончания процесса адаптации и переходного процесса в основном контуре. Амплитуда ступенчатого возмущения − (1…5). Результат − графики переходных процессов в адаптивной системе с параметрической настройкой.
4.3.Содержание отчета
1.Структурная схема, значения параметров объекта управления.
2.Перечисленные в программе результаты и выводы по работе.
4.4.Контрольные вопросы
1.Какую роль играет настраиваемая модель?
2.Каким образом осуществляется адаптация?
3.Какова роль матриц Γa, Γb ?
25
Список литературы
1.Гультяев А. К. Matlab 5.2. Имитационное моделирование в среде Windows: практ. пособие. СПб.: Корона принт, 1999.
2.Чаки Ф. Современная теория управления (нелинейные, оптимальные и адаптивные системы) / пер. с англ. М.: Мир, 1975.
3.Александров А. Г. Оптимальные и адаптивные системы. М.: Высш.
шк., 1989.
4.Попов Е. П. Теория нелинейных систем автоматического регулирования: учеб. пособие. М.: Наука, 1979.
5.Дорф Р. К., Бишоп Р. Х. Современные системы управления / пер. с англ. М.: Лаб. базовых знаний, 2002.
6.Мирошник И. В. Теория автоматического управления. Нелинейные и оптимальные системы. СПб.: Питер, 2006.
26
Содержание
Лабораторная работа 1. Исследование нелинейного закона управления, оптимального по быстродействию……………………………………………….3
Лабораторная работа 2. Синтез и исследование нелинейных кор-
ректирующих устройств в САУ…………………………………………….………..…7
Лабораторная работа 3. Исследование адаптивной электромеханической системы с эталонной моделью………………………………..…………..13
Лабораторная работа 4. Исследование адаптивной системы с настраиваемой моделью и параметрической настройкой…………………………...19
Список литературы……………………………………………………………….26
27
Исследование нелинейных и адаптивных систем управления
Электронное учебно-методическое пособие
Редакторы: И. Г. Скачек, О. Р. Крумина
––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
Подписано в печать 17.10.17. Формат 60×84 1/16. Гарнитура «Arial». Печ. л. 1,75.
Тираж 2 экз. Заказ 196.
––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
Издательство СПбГЭТУ «ЛЭТИ» 197376, С.-Петербург, ул. Проф. Попова, 5