

требования / Zadanie_na_kursovuyu_i_laboratornye_raboty / Заочники весна 2019 / Блок / Блок
.pdf6. Примеры решения задач по оцениванию качества моделей и полимодельных комплексов
Рис. 6.4. Различие рейтингов квартир с участием общей площади и без нее.
Линейная зависимость этих рейтингов составляет 93,47%, а общее изменение порядка составило 3,27%, что свидетельствует о малом влиянии показателя общая площадь на результаты упорядочения.
Для оценивания качества модели выбора квартиры воспользуемся информацией об ее стоимости. Предварительно оценим согласованность рыночной стоимости квартир и стоимости квадратного метра в предположении того факта, что качество квартир пропорционально их стоимости. График сопоставления рейтинга квартир по рыночной стоимости и стоимости квадратного метра приведен на рис. 6.5.
Рис. 6.5. Различие рейтингов квартир по рыночной стоимости и стоимости квадратного метра.
211

Квалиметрия моделей и полимодельных комплексов
Линейная зависимость этих рейтингов составляет 12,26, а общее изменение порядка составило 43,87%, что свидетельствует о практической независимости рыночной стоимости квартиры от стоимости квадратного метра. Поскольку стоимость квадратного метра характеризует затраты изготовителя, а рыночная стоимость – востребованность квартиры потребителями, примем за базу сравнения рыночную стоимость квартир.
Сопоставим рейтинг рыночной стоимости квартир с рейтингом их качества. График сопоставления этих рейтингов приведен на рис. 6.6.
Линейная зависимость этих рейтингов составляет 49,22, а общее изменение порядка составило 25,39%, что свидетельствует о существенном различии рейтингов. Оно может быть обусловлено равной важностью показателей, принятой для упрощения расчетов, и неквалифицированными балльными оценками символьных показателей. Отсюда следует необходимость анализа рыночной стоимости на предмет ее конъюнктурности и модели оценивания качества квартир на предмет ее достоверности, что требует привлечения более квалифицированных экспертов и использования групповой экспертизы. Этим примером показана возможность повышения качества модели оценивания и методика ее реализации.
Рис. 6.6. Различие рейтингов квартир по рыночной стоимости и показателям качества.
6.4. Оценивание качества онтологической модели
Постановка задачи. В работе [5] предложена шкала уровней качества систем с управлением. Задача оценивания подобных систем актуальна в связи с постояннымусложнениемуправленческихфункций.Онаособенновостребовананаэтапепроектированиясложныхтехническихобъектов.Внормальных условиях их функционирования ставится задача максимального облегчения труда человека. В условиях функционирования в агрессивной среде, например, в военных условиях, ставится задача минимального участия человека в их управлении. С экономической точки зрения представляет интерес распределение затрат на реализацию различных управленческих функций.
212
6. Примеры решения задач по оцениванию качества моделей и полимодельных комплексов
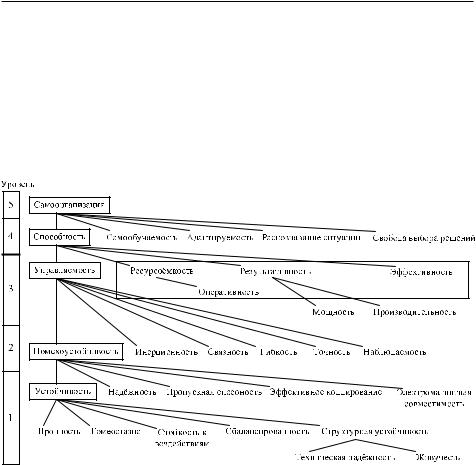
Приняв самоорганизацию за высший уровень управления, авторы работы предложили шкалу уровней качества систем с управлением, «проранжированных в порядке возрастания сложности рассматриваемых свойств. Эмпирические уровни качества получили следующие названия: устойчи-
вость, помехоустойчивость, управляемость, способность, самоорганиза-
ция»(рис.6.7).Рассматриваемаямодельотноситсякклассуонтологических моделей, представляя собой вариант онтологии управленческих функций. На основании требований, предъявляемых к качеству моделей, оценим качество этой модели.
Пропускная способность |
Рис. 6.7. Шкала уровней качества и дерево свойств системы с управлением.
Решение задачи. Начнем анализ предложенной шкалы с ее названия. В
словосочетаниикачество систем с управлением словосистема не несет кон-
кретной смысловой нагрузки. Здесь слово качество непосредственно относится к управлению, поскольку другие свойства системы не упоминаются.
Естественно, что объекты с разным уровнем самоорганизации характеризуются различными совокупностями свойств управления, отражающими степень участия человека. Насколько сравнимы по качеству управления, например, такие двухколесные транспорты, как велосипед и электросамокат? Равновесием велосипеда управляет человек, а равновесие электросамоката поддерживается автоматически.
Показатель качества должен давать ответ на вопрос «в какой степени рассматриваемый объект обладает свойством (способностью) удовлетворять потребность потребителя?». Но от велосипеда невозможно требовать автоматического поддержания равновесия, поскольку ему не придается это свойство. Следовательно, эти два вида транспорта не сопоставимы по качеству управления.
213

Квалиметрия моделей и полимодельных комплексов
За основу линейного упорядочения делений предлагаемой шкалы ее авторы приняли «сложность рассматриваемых свойств». Но такого понятия, как сложность свойства, не существует. Понятием сложность характеризуются системы. Их оценивают такими видами сложности, как информационная, структурная, функциональная (алгоритмическая). Например, для сравнения алгоритмов одного назначения рассчитывают асимптотические оценки алгоритмической сложности.
Примером неправомерного сопоставления свойств объектов по сложности является утверждение: «Более сложным свойством, чем устойчивость, является помехоустойчивость, понимаемая как способность системы без искажений воспринимать и передавать информационные потоки». Как можно сопоставлять по сложности даже такие однородные понятия, как устойчивость и помехоустойчивость, если они имеют разные категории общности? В то время как свойствоустойчивость применимо к объектам любой природы (материальной, энергетической и информационной), свойством помехоустойчивости обладают только информационные объекты. Формулируя отношения между свойствами, авторы на самом деле имеют в виду сложность их реализации. Но как доказать, что обеспечение помехоустойчивости информационного объекта сложнее, чем обеспечение устойчивости энергетического объекта к воздействиям окружающей среды? Следовательно, необходимо ввести ограничения на объекты, подлежащие предлагаемой классификации.
Несопоставимость по категории общности присуща и другим понятиям,принятымзаделенияшкалыкачества.Вобоснованиеградациикачества способность она определяется как «потенциальная эффективность функционирования системы, способность получить требуемый результат при идеальном способе использования ресурсов и в отсутствие воздействий внешней среды». Однако понятие способность является слишком общим, чтобыимобозначатьградациюкачества.Вчастности,способностьпринято относить и к природным свойствам личности (математические, музыкальные и другие способности). Но они не имеют никакого отношения к характеристике систем с управлением.
В теории управления управляемость и устойчивость рассматриваются как взаимосвязанные свойства объекта. Управляемость объекта обозначает его свойство воспринимать управляющие воздействия органа управления (по переводу объекта из одного состояния в другое), а устойчивость означает свойство объекта сохранять заданные параметры функционирования при внутренних или внешних воздействиях на него. Эти понятия имеют разное назначение и степень общности, и их использование для обозначения разных делений шкалы качества выглядит необоснованным.
Согласно [5], «наиболее сложным качеством системы является самоорганизация». Словосочетание наиболее сложное качество соответствует высшей градации шкалы, деления которой упорядочены по сложности свойств, но противоречит градации высокое качество, принятой в квалиметрии. На самом деле имеется в виду наивысший уровень управления, присущий самоорганизующейся системе, которая «способна изменять свою структуру, параметры, алгоритмы функционирования, поведение для повышения эффективности».
214

6. Примеры решения задач по оцениванию качества моделей и полимодельных комплексов
Каждая градация шкалы качества раскрывается через иерархию «более простых» свойств. Самоорганизация раскрывается через такие присущие ей свойства, как «свобода выбора решений, адаптируемость, самообучаемость,способностьк распознаванию ситуаций». Эти свойствадействительно можно использовать в перечислительном определении понятия самоорганизация, хотя требуется доказать его полноту.
Необоснованным выглядит раскрытие последующих градаций шкалы качества. В частности, утверждается, что «помехоустойчивость объединяет ряд свойств, присущих в основном системам управления, таких как надежность информационных систем и систем связи, их пропускная способность, возможность эффективного кодирования/декодирования информации, электромагнитная совместимость радиоэлектронных средств и т. д.». Из перечисленных свойств только кодирование/декодирование имеет прямое отношение к помехоустойчивости как средству обеспечения надежности при передаче информации.
Столь же необоснованным выглядит раскрытие градации устойчивость, «объединяющей такие свойства, как прочность, стойкость к внешним воздействиям, сбалансированность, стабильность, гомеостазис». Из них только гомеостазис имеет прямое отношение к системам с управлением. Прочность и стойкость к внешним воздействиям относятся к физическим свойствам объекта. Стабильность является фактическим синонимом устойчивости, а сбалансированность близка по смыслу равновесию (гомеостазису).
Исходя из требований к качеству онтологической модели, сформулированных в предыдущем разделе, отметим основные недостатки рассматриваемой модели.
1.Не введены ограничения на объекты, подлежащие предлагаемой классификации.
2.Не установлены обоснованные отношения между понятиями как в шкале уровней качества, так и в «дереве свойств системы с управлением», что является одним из следствий их произвольной трактовки. В частности,
воснову шкалы уровней качества положен искусственный признак сложность свойства. Количественной характеристикой свойства является не сложность, а величина характеризующего его показателя как мера обладания этим свойством. Деление свойств на сложные и простые противоречит самому понятию свойство (то, что неотъемлемо принадлежит объекту).
3.Употребляемые в модели термины в отсутствие обоснованных определений играют роль знаков, обозначающих некоторые понятия, соответ-
ствующие эвристическим принципам формируемой модели. Используемая узкодисциплинарная трактовка понятий противоречит сути междисциплинарной модели, требующей применения обобщающих понятий (Umbrella terms).Вотсутствиеделенияпонятийпокатегориямобщностиимеютместо противоречия между их содержаниями.
4.Шкалауровнейкачестванеотвечаеттребованиюклассификациисистем
суправлениемпокачеству,посколькуонимогутобладатьсвойствами,присущими разным градациям. Например, система может обладать как управляемостью, так и устойчивостью, отвечая сразу двум градациям качества.
215

Квалиметрия моделей и полимодельных комплексов
Согласно отмеченным недостаткам, рассматриваемая онтологическая модель не отвечает предъявляемым к ней требованиям. Рассчитанная на человеческое восприятие, она не объективизирует знание в области управления и качества, а создает предпосылки для субъективных трактовок.
6.5. Решение задачи оптимизации показателей качества моделей, алгоритмов и программ системного моделирования процессов автоматизированного управления космическими аппаратами
6.5.1. Постановка задачи
Современные автоматизированные системы управления (АСУ) космическими средствами (КСр), являющиеся одной из разновидностей сложных организационно-технических систем (СОТС), включают в свой состав орбитальные и наземные КСр (ОрКСр, НКСр). В свою очередь, ОрКСр и НКСр, объединяясь и взаимодействуя между собой, образуют соответственно: орбитальные системы (ОрС) КСр, или, по-другому, ОрС космических аппаратов (ОрС КА), а также наземные комплексы управления (НКУ) [7‒13]. Общая организация и проведение работ в перечисленных системах и комплексах осуществляются при непосредственном участии и под руководством различных категорий специалистов, обеспечивающих надежное и устойчивое функционирование АСУ КСр [7].
В настоящее время при проектировании, внедрении, эксплуатации и развитии АСУ КСр одной из актуальных проблем была и остается проблема автоматизации управления, включающего в себя такие основные функции управления, как целеполагание, планирование, оперативное управление, контроль, учет, мониторинг состояния, координация и т. п.
Далее,исследуявопросысинтезаспециальногопрограммно-математиче- ского и информационного обеспечения (СПМО) АСУ КА, будем подробно рассматриватьзадачусинтезатехнологиисовместного(раздельного)планированияиуправленияработойбортовогокомплексауправления(БКУ)КАи средств наземного комплекса управления КА. На рис. 6.8, 6.9 представлены в обобщенном виде структуры АСУ КА. На рисунках приняты следующие условные сокращения: система связи и передачи данных (ССПД), система единого времени (СЕВ), центр управления полетом (ЦУП), пункт управления (ПУ), баллистический центр (БЦ), телеметрический центр (ТМЦ), баллистико-навигационная информация (БНИ), командно-программная информация (КПИ).
Формально описывая и исследуя процессы совместного и раздельного планирования работы БКУ и НКУ КА, будем предполагать, что они представляют собой целенаправленные, организованные и непрерывные процесы выделения различных элементов и аспектов СОТС (в рассматриваемом случае АСУ КА), определения их состояния и взаимодействия в данное время, прогнозирования их развития на некоторый период времени в будущем, а также составления и программирования набора действий и планов,
216

6. Примеры решения задач по оцениванию качества моделей и полимодельных комплексов
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 6.8. Обобщенная структура АСУ КА. |
Рис. 6.9. Обобщенная структура НКУ. |
|||||||||||||||||||||||||||
направленных на достижение желаемых результатов [6, 14]. Планирование как этап принятия управленческого решения обладает целым рядом специфических черт, среди которых можно выделить следующие [15‒20]:
–планирование – это процесс принятия предварительного решения об облике организации и механизмах ее функционирования, обеспечивающих на заданном интервале времени достижение поставленных целей;
–результатом планирования является система взаимосвязанных решений, распределенных как в пространстве, так и во времени, оказывающих влияние друг на друга; при этом, в силу общности ресурсов, используемых для выработки и поддержки программных траекторий, функция планирования непосредственно связана с функцией регулирования;
–процесс планирования постоянно приближается к завершению, но никогда не достигает его по двум причинам: во-первых, существует возможность бесконечно пересматривать ранее принятые решения, хотя из-за необходимости предпринимать конкретные действия по достижению поставленных целей требуется все-таки рано или поздно остановиться на ка- ком-то варианте решения; во-вторых, планирование осуществляется в течение определенного промежутка времени, в ходе которого может измениться как сама организация, так и внешняя среда, поэтому сформированные планы нуждаются в постоянной корректировке;
–планирование направлено на предотвращение ошибочных действий и уменьшение неиспользованных возможностей.
В общем случае при планировании приходится решать следующие классы задач [14]:
1) определение целей и задач, стоящих перед СОТС, т. е. определение состояний, желательных для данной организации, и определение времени,
ккоторому должны быть достигнуты данные цели и задачи;
2)определение средств достижения этих целей и задач;
3)определение ресурсов и источников получения ресурсов для реализации планов, а также разработка принципов, методов и методик распределения ресурсов между элементами и подсистемами СОТС;
4)разработка(синтез)обликаСОТС(и,преждевсего,ееосновныхструктур, в том числе структуры технологии автоматизированного управления),
атакже механизмов (алгоритмов) ее функционирования, обеспечивающих непрерывность комплексного процессов планирования и реализации плановых решений; и, наконец, собственно проведение планирования на стра-
217

Квалиметрия моделей и полимодельных комплексов
тегическом, оперативном и тактических уровнях управления соответствующими объектами.
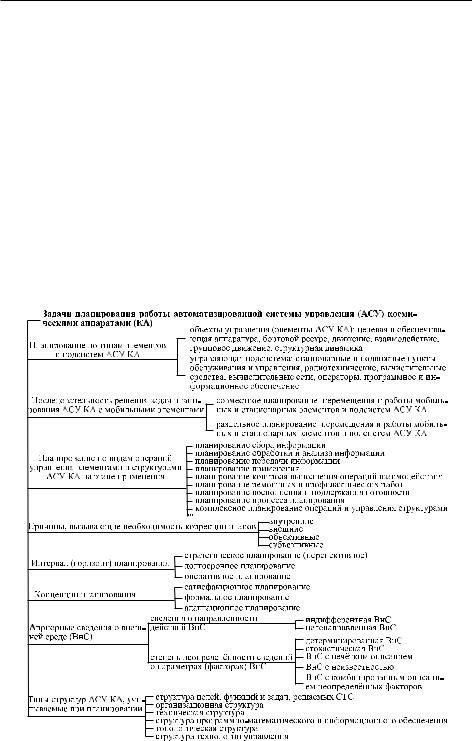
Главная трудность при решении задачи совместного планирования работы БКУ КА и НКУ КА состоит в следующем: определение оптимальных программ управления основными элементами и подсистемами АСУ КА может быть выполнено лишь после того, как станет известен перечень функций и алгоритмов обработки информации и управления, который должен быть реализован в указанных элементах и подсистемах. В свою очередь, распределение функций и алгоритмов по элементам и подсистемам АСУ КА зависит от структуры и параметров законов управления данными элементами и подсистемами. Трудность разрешения данной противоречивой ситуации усугубляется еще и тем, что под действием различных причин во времени изменяется состав и структура АСУ КА на различных этапах ее жизненного цикла.
Нарис.6.10применительнокАСУКСрпроведенаболееподробнаяклассификация задач планирования (в том числе планирования распределения функций управления). Процесс планирования является достаточно сложным объектом исследования. При этом процесс планирования должен быть самспланирован.Любойпланимеетследующиепятьосновныхобщихкомпонент, на которых он строится: исходное (начальное) состояние объекта планирования, цель (или конечное состояние объекта планирования), средства (ресурсы) и технологии, обеспечивающие связь этих состояний.
К настоящему времени сформировалось три подхода (три философии, концепции) планирования [14]: сатисфакционное (удовлетворительное), формальное и системное планирование. Формальное планирование делает акцент на предсказании развития обстановки (в терминах математических моделей), сатисфакционное – на реакции СОТС на воздействия внешней среды, при системном планировании стремятся способствовать взаимодействию СОТС с внешней средой, переопределяя проблемы через процесс обучения. Поэтому в данном случае процесс планирования трактуется не как дискретная деятельность, а как непрерывно развивающийся адаптивный процесс. В работах [20–25] данный вид планирования назван адаптационным. При этом адаптация планов проводится на основе апостериорной, текущей и априорной информации (адаптация к «прошлому», «настоящему», «будущему»). В рамках перечисленных выше концепций планирования были разработаны многочисленные теории планирования для различных предметных областей [25–34].
Ограниченный объем монографии не позволяет подробно остановиться на достоинствах и недостатках всех существующих подходов к решению задач планирования, а также анализа и синтеза показателей качества соответствующих моделей, методов, алгоритмов планирования и технологий системного моделирования как процессов формирования планов, так и их реализации. Поэтому для иллюстрации ранее изложенного в разделе 4 материала ограничимся лишь рассмотрением вопросов структурно-функ- ционального синтеза технологии автоматизированной обработки, анализа информации, полученной с использованием бортовой специальной аппаратуры КА, а также синтеза соответствующих характеристик (показателей
218
6. Примеры решения задач по оцениванию качества моделей и полимодельных комплексов
качества) СПМО процессов и составления программ функционирования (планов, расписаний) БКУ и НКУ КА наземными техническими средствами, входящими в состав НКУ ОрС КА. Кроме того, в данном подразделе будет проведено оценивание качества существующих и разработанных авторами монографии алгоритмов планирования, а также их адаптации к возможным классам возмущающих воздействий на этапе реализации составленных планов. Необходимо отметить, что в рассматриваемой предметной области накоплен значительный опыт в решении отдельных частных задач планирования работ и распределения ресурсов для отдельных элементов и подсистем НКУ в различных условиях обстановки. К указанным задачам относятсязадачипланированияработыкомандно-измерительныхрадиотех- нических средств, вычислительных телекоммуникационных средств, планирование работы операторов НКУ и т. п. [7–9, 18–21]. При автоматизации решения данных классов задач широко использовались как математические модели (прежде всего, модели математического программирования, имитационные модели), так и логико-алгебраические, логико-лингвистические модели [22–24, 28–34].
Рис. 6.10. Классификация задач планирования работы АСУ КА.
219

Квалиметрия моделей и полимодельных комплексов
Однако, к сожалению, при таких подходах к решению частных задач планирования работ в НКУ зачастую не выполнялись основные требования системного подхода, что конкретно проявлялось в значительной несогласованности процессов функционирования элементов и подсистем, входящих в состав НКУ, возникновении «пиковых» информационных нагрузок в комплексах средств автоматизации, отсутствии ориентации задач планирования на повышение эффективности применения АСУ ОрС КА. Кроме того, при указанном подходе к решению задач планирования не учитывались современные тенденции и перспективы развития АСУ ОрС КА, связанные с их интеграцией и возможными вариантами управления структурной динамикой данных систем [26–32].
Предлагаемый в данном подразделе подход, основанный на динамической интерпретации процессов автоматизированного управления КСр, позволяет реализовывать концепцию системного планирования. При этом разработанные унифицированные логико-динамические модели функционирования средств АСУ КА можно использовать как, собственно, на этапах прогнозирования возможностей КА и планирования их работы (на этапах перспективного, долгосрочного, оперативного планирования), так и на этапе реализации плана.
Обобщенная технология оперативного планирования работы АСУ КА должна в этих случаях включать в себя следующие этапы:
–адаптацияпараметровиструктурымоделей,алгоритмовпланирования
ирегулирования работы средств АСУ КА к прошлому и текущему состоянию КСр, внешней среды;
–структурно-функциональный синтез основных элементов и подсистем АСУ КА;
–собственно, составление расписания работы АСУ КА; имитация возможных сценариев реализации планов функционирования АСУ КА с учетом различных вариантов регулирования его элементами и подсистемами; адаптация(структурная,параметрическая)плана,моделей,алгоритмовпланирования работы АСУ КА к возможным (прогнозируемым на имитационных моделях) АСУ КА и внешней среды.
В данном примере, как уже указывалось выше, основное внимание уделено лишь трем основным этапам данной технологии — синтезу структуры программно-математического обеспечения АСУ КА, составлению расписания работы аппаратно-программных средств, входящих в состав АСУ КА, а также адаптации параметров и структуры моделей, алгоритмов планирования и регулирования работы средств АСУ КА к прошлому и текущему состоянию КСр, внешней среды.
Возможные подходы к реализации других этапов указанной технологии применительно к различным предметным областям описаны в работах [3540] и на сайте http://litsam.ru.
Рассмотримвначалепримерописаниякомплексадетерминированныхло- гико-динамических моделей управления структурной динамикой АСУ КА, на базе которого была построена соответствующая имитационная система (ИмС), конструктивно реализующая на программном уровне концепцию и технологии системного моделирования применительно к космической сфе-
220