

требования / Zadanie_na_kursovuyu_i_laboratornye_raboty / Заочники весна 2019 / Блок / Блок
.pdf6. Примеры решения задач по оцениванию качества моделей и полимодельных комплексов
Рис. 6.29. Сравнение долгосрочных прогнозов для поста Каликино.
Из анализа данного графика видно, что прогнозирование с помощью ИНС для нештатных ситуаций более неустойчиво и дает существенно большую погрешность при долгосрочных прогнозах их возникновения.
Таким образом, по результатам проведенных исследований можно сделать вывод, что ИНС дают лучший результат в режиме нормального функционирования и способны с высокой точностью прогнозировать длительные по времени и инертные изменения, влияющие на уровень воды. Это обусловлено большим набором тестовых примеров в период нормального ледохода, что позволило научить сети с высокой точностью прогнозировать уровеньводывтакихусловиях.Всвоюочередь,прогнозированиерезкихизменений и аномальных ситуаций дают высокую погрешность, поскольку, с одной стороны, отсутствовало достаточное количество обучающих данных, которыебыпозволилиохватитьизмененияуровняпривсехвозможныханомальных ситуациях. С другой стороны, множество аномальных ситуаций обусловлено причинами, возникающими в период замерзания реки или в зимний период. ИНС же в своем прогнозе использует только оперативные данные о текущем состоянии реки и не может учитывать эти долгосрочные причины и оценивать их влияние на уровень воды.
Имитационная модель ECOMAG, в свою очередь, все эти данные способна конструктивно учитывать и на этой основе обеспечивать прогнозирование возможных долгосрочных аномальных ситуаций. Однако для каждой такой ситуации требуется ручная настройка множества входных параметров модели специалистом, что сильно снижает оперативность прогнозов. Все это иллюстрируется, к примеру, большой погрешностью при расчете уровня в начале ледохода на гидропосту Каликино. Несмотря на высокую точность прогнозирования изменений уровня, имела место высокая же си-
261

Квалиметрия моделей и полимодельных комплексов
стематическая ошибка, которая была обусловлена ледниковым «зажором», который, в свою очередь, спровоцировал поднятие уровня воды. Поскольку характеристики этого «зажора» не были известны, не было возможности оперативноговнесенияпоправоквмодельиисправленияпогрешностипрогноза.
На основании всех этих причин в процессе работы ИС «ПРОСТОР» во время нормального ледохода прогнозирование осуществлялось с помощью ИНС. В то же время уже при возникновении нештатной ситуации происходило переключение на имитационную модель, которая позволяла точнее спрогнозировать характер развития данной ситуации. Данная технология системного моделирования и оперативного прогнозирования хорошо иллюстрирует основные этапы алгоритма структурной адаптации моделей, пред- ложенногов4-мразделеданноймонографии.Нарис.6.30представленафо- тография, иллюстрирующая прогностические возможности разработанного комплекса моделей, которые позволили с высокой точностью оценить районы затопления территорий, прилегающих к р. Даугава, вовремя наводнения
2013 г. [49].
Рис. 6.30. Динамика развития наводнения. Фотоснимки с интервалом в сутки.
6.7. Оценивание качества моделей и методов определения технического состояния объекта
Высокие требования, предъявляемые в настоящее время к качеству и достоверности оценивания состояния сложных технических объектов, приводят к необходимости постоянного совершенствования технологии мониторинга их состояния, которая, в общем случае, включает в себя взаимосвязанные процессы сбора, обработки, контроля и анализа измерительной информации, а также процессы диагностирования в случае возникновения сбоев и неисправностей. В связи с указанным в состав любой современной АСУ в качестве базовой подсистемы входит автоматизированная система мониторинга (АСМ) состояния объекта, главной функцией которой, по сути, является определение состояния, или, более точно, проведение мониторинга состояний объектов управления АСУ. В условиях повышения
262

6. Примеры решения задач по оцениванию качества моделей и полимодельных комплексов
требований к АСУ эффективность ее применения во многом определяется эффективностью АСМ как подсистемы АСУ. Тем более что в АСМ циркулируют большие и даже сверхбольшие потоки информации, значительная часть которой является измерительной и составляет свыше 80% от всего объема используемой в контурах управления АСУ информации. При этом требования к процессам обработки и представления результатов обработки этой доли информации достаточно жесткие, так как на ее основе осуществляется управление объектами в режиме реального времени. Одной из задач,решаемыхпримониторингесостояниясложныхтехническихобъектов, является диагностирование в сжатые сроки их неисправностей и отказов.
В качестве примера рассмотрим возможный подход к решению задачи обоснованного выбора метода распознавания технического состояния (ТС) объекта.
Для решения задачи будем использовать диагностические СФ-модель и О-модель,которые,соответственно,представляютсяввидекортежей[60,61]:
MСФ = S, П, LФ ; |
(6.50) |
ˆ |
(6.51) |
Mо = S, Ω, P, П . |
Элементами этих моделей являются:






 – множество возможных ТС объекта, которые представля-
– множество возможных ТС объекта, которые представля-
ют собой либо исправные состояния в различных режимах работы объекта (при решении задачи контроля правильности функционирования), либо неисправные, вызванные отказами функциональных элементов, с точностью до которых локализуются неисправности (при решении задачи диагностирования).






 – множество показателей (параметров), информативных для распознавания ТС объекта.
– множество показателей (параметров), информативных для распознавания ТС объекта.










 – множество диагностических признаков, пред-
– множество диагностических признаков, пред-
ставляющих собой интервалы на шкале показателя (параметра) πj Π, по принадлежности к которым можно различить хотя бы одно ТС от всех остальных, т. е. на множестве L все ТС Si S попарно различимы. Будем полагать, что зарегистрированные значения yj соответствующих параметров πj Π являются вещественными числами, равномерно распределенными по заданным интервалам λij и представляют собой измерительную информацию, поступающую с объекта.







 – множество проверок, взаимно однозначно соответству-
– множество проверок, взаимно однозначно соответству-
ющее множеству Π, т. е. πˆj Пˆ есть проверка соответствующего параметра πj Π, которая заключается в измерении его текущего значения yj и выявлении принадлежности этого значения интервалу λij L или нескольким интервалам, если они пересекаются.
Ф: S × П → L – отображение, устанавливающее связь между элементами множеств L, S, и Π.
263

Квалиметрия моделей и полимодельных комплексов
Ω = {R |R S} – множество информационных состояний (ИС), под которыми будем понимать состояния процесса диагностирования, в отличие от состояний Si (  ), подлежащих распознаванию. Такое название обусловлено тем, что всякое подмножество R S характеризует степень неопределенности распознаваемого ТС объекта [60, с. 447].
), подлежащих распознаванию. Такое название обусловлено тем, что всякое подмножество R S характеризует степень неопределенности распознаваемого ТС объекта [60, с. 447].
Элементы в множестве Ω различаются по своей мощности. Каждое из этих ИС R Ω физически означает подмножество «подозреваемых» ТС, в одном из которых может находиться объект в момент определения его
состояния. Конечными ИС являются одноэлементные множества R = {Si},
 , которые обозначим через Ri. Все остальные неконечные ИС R S, для
, которые обозначим через Ri. Все остальные неконечные ИС R S, для которых 2 ≤ card{R} ≤ m, обозначим через Rk (k = m + 1, m + 2, …).
которых 2 ≤ card{R} ≤ m, обозначим через Rk (k = m + 1, m + 2, …).
P = {P(R)|R Ω} – множество вероятностей рассматриваемых ИС, задан-
ных на множестве Ω, которые используются в случайном процессе выбора последовательностипроверок,необходимыхдляраспознаванияТСобъекта.
Кроме того, может быть задано множество |
|
затрат |
||
|
|
, |
||
ресурсов (временных или материальных) на выполнение проверок |
||||
где |
– цена каждой проверки. |
|
||
Исходом проверки |
, выполняемой в информационном состоянии |
|||
Rk, назовем событие, заключающееся в попадании измеренного значения yj |
|||||||
параметра πj Π в один из подынтервалов |
|
|
|
. Очевидно, что |
|||
число ωkj |
возможных исходов проверки равно числу выделенных подын- |
||||||
тервалов и что это число конечно. Каждому подынтервалу |
kj присвоим по- |
||||||
рядковый номер v, т. |
е. введем обозначение |
|
|
|
. Соответствен- |
||
но, v- й исход проверки обозначим через |
, определив его как событие |
||||||
|
. |
можем формально представить как отображение |
|||||
Тогда проверку |
|||||||
|
|
|
|
|
|
, |
(6.52) |
|
|
|
|
|
|||
где |
– подмножество, содержащее только те из ТС Si Rk, которым |
||||||
соответствуют пересекающиеся интервалы λij L, т. е. |
|
||||||
|
|
|
|
. |
|
(6.53) |
|
|
|
|
|
|
|||
При v-м исходе проверки из ИС Rk получается новое ИС
из ИС Rk получается новое ИС , содержащее меньшее число «подозреваемых» ТС, т. е. card{
, содержащее меньшее число «подозреваемых» ТС, т. е. card{ } < card{Rk}.
} < card{Rk}.
Вероятность
 исхода проверки
исхода проверки , выполненной в ИС Rk, опреде-
, выполненной в ИС Rk, опреде-
ляется вероятностью |
перехода из ИС Rk в ИС |
и вычисляется |
||||
по формуле |
|
|
|
|
|
|
|
|
|
|
|
, |
(6.54) |
|
|
|
|
|
||
|
|
|
|
|||
264

6. Примеры решения задач по оцениванию качества моделей и полимодельных комплексов
где |
|
|
|
и |
|
|
|
– длины соответствующих подын- |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|||
тервалов. |
|
|
|
|
|
|
||
|
|
|
|
|
|
|||
Процесс распознавания ТС, в котором находится объект, будет более эффективным,еслидляпроверокиспользоватьтолькотакие,которыепозволя-
ют отличить хотя бы одно ТС Si |
от другого. Такие проверки будем называть |
разрешенными (допустимыми). |
назовем разрешенной (допустимой) |
Другими словами, проверку |
для выполнения в ИС Rk S, если найдется хотя бы одна пара технических |
|
состояний Si, Sf Rk, которым соответствуют непересекающиеся интервалы |
|
λij, λfj L. Условие, по которому определяется подмножество |
допусти- |
мых проверок, запишем в виде |
|
. |
(6.55) |
Для удобства будем представлять процесс диагностирования в виде ориентированного графа G, вершинами которого обозначаются ИС Rk процесса распознавания ТС объекта, а дугами – исходы  проверок в этих состояниях. Граф G состоит из ветвей Gr U (r – порядковый номер ветви, U – множество всех ветвей), каждая из которых приводит к конкретному
проверок в этих состояниях. Граф G состоит из ветвей Gr U (r – порядковый номер ветви, U – множество всех ветвей), каждая из которых приводит к конкретному
ТС Si 


 , имеет одну начальную и m конечных вершин – по числу
, имеет одну начальную и m конечных вершин – по числу
возможных ТС объекта. Каждая из m конечных вершин соответствует опознанному ТС объекта. При интервальном задании диагностических признаков количество ветвей Gr графа G может значительно превосходить число распознаваемых ТС объекта, т. е. в одно и то же ТС Si S может приходить несколько ветвей.
ПриуказанныхусловияхтребуетсянайтидлякаждогоТСSi S 


 упорядоченное подмножество проверок
упорядоченное подмножество проверок

 , такое, что
, такое, что





















 .
.
Кроме того, необходимо, чтобы это подмножество содержало наиболее эффективные в определенном смысле проверки, т. е. удовлетворяло определенным требованиям оптимальности. Эти требования заключаются, например, в том, чтобы найденные подмножества проверок  обеспечивали определениесоответствующегоТСобъектасминимальными
обеспечивали определениесоответствующегоТСобъектасминимальными затратамиили с максимальной достоверностью.
затратамиили с максимальной достоверностью.
Упорядоченность каждого подмножества 
 понимается в том смысле, что порядок расположения проверок в нем соответствует очередности их выполнения в процессе диагностирования.
понимается в том смысле, что порядок расположения проверок в нем соответствует очередности их выполнения в процессе диагностирования.
Множество проверок |
в сочетании с правилами, определяю- |
щими порядок их выполнения, образует программу диагностирования. Будем рассматривать только условные (гибкие) программы диагностирования (ГПД), так как они обладают более широкими возможностями для опти-
образует программу диагностирования. Будем рассматривать только условные (гибкие) программы диагностирования (ГПД), так как они обладают более широкими возможностями для опти-
265
Квалиметрия моделей и полимодельных комплексов
мизации, чем безусловные. Другими словами, ГПД объекта задает состав проверок и последовательность их выполнения для распознавания каждого
из его возможных ТС Si S 


 .
.
Задача синтеза ГПД заключается в отыскании упорядоченных подмно-
жеств проверок |
, обеспечивающих переход от начального состоя- |
||||||
нияRk = S ккаждомуизконечныхсостоянийSi S |
|
,т.е.таких,что |
|||||
|
|||||||
|
|
|
|
|
, |
|
|
|
|
|
|
|
|
||
где |
– композиция отображений (формула (6.52)), соответствующих |
||||||
отдельным проверкам. |
|
обеспечивает распознавание i-го ТС объек- |
|||||
Каждое из подмножеств |
|||||||
та (r – номер ветви, ведущей в i-е ТС). Особенность искомых подмножеств в том, что они структурно взаимосвязаны в рамках составляемой программы, а потому не могут отыскиваться по отдельности. Другая особенность (только при использовании непрерывных признаков) – существование нескольких таких подмножеств для одного и того же ТС (т. е. в одно и то же ТС Si могут приводить несколько ветвей Gr), причем все эти подмножества должны быть найдены в процессе составления программы.
I. Диагностическая модель объекта
Диагностическая СФ-модель объекта включает следующие составляющие:






 – множество технических состояний, в одном из которых может находиться проверяемый объект;
– множество технических состояний, в одном из которых может находиться проверяемый объект;







 – множество информативных параметров;
– множество информативных параметров;











 – множество интервалов на шкале параметров πj
– множество интервалов на шкале параметров πj
Π, на которых все ТС Si S попарно различимы;

 – цена (в усл. ед.) каждой проверки.
– цена (в усл. ед.) каждой проверки.
Пример диагностической СФ-модели для пяти распознаваемых состоя-
ний Si,


 , и пяти информативных показателей (параметров) πj ,
, и пяти информативных показателей (параметров) πj , 

 , приведен в табл. 6.30.
, приведен в табл. 6.30.
Табл. 6.30. Таблица состояний.
ТС Si |
|
Информативные параметры πj |
|
|||
|
|
|
|
|
||
π1 |
π2 |
π3 |
π4 |
π5 |
||
|
||||||
|
|
|
|
|
|
|
S1 |
(0, 0; 0, 4) |
(0, 2; 0, 5) |
(0, 1; 0, 3) |
(0, 0; 0, 5) |
(0, 5; 1, 0) |
|
S2 |
(0, 2; 0, 6) |
(0, 7; 1, 0) |
(0, 3; 0, 8) |
(0, 2; 0, 6) |
(0, 0; 0, 3) |
|
S3 |
(0, 5; 0, 8) |
(0, 0; 0, 4) |
(0, 6; 1, 0) |
(0, 4; 0, 6) |
(0, 6; 0, 8) |
|
S4 |
(0, 6; 1, 0) |
(0, 2; 0, 7) |
(0, 4; 0, 8) |
(0, 7; 1, 0) |
(0, 3; 0, 5) |
|
266

6. Примеры решения задач по оцениванию качества моделей и полимодельных комплексов
Окончание таблицы 6.30
S5 |
(0, 3; 0, 5) |
(0, 6; 0, 8) |
(0, 0; 0, 3) |
(0, 5; 0, 7) |
(0, 3; 0, 7) |
|
2 |
3 |
4 |
6 |
5 |
|
|
|
|
|
|
Задача заключается в построении минимального теста, т. е. последовательности проверок минимальной длины. В процессе построения этой последовательности определяются упорядоченные подмножества проверок 

 , необходимых для распознавания всех заданных ТС объекта. При
, необходимых для распознавания всех заданных ТС объекта. При
этом множество 


 должно обеспечивать распознавание любого
должно обеспечивать распознавание любого
иззаданныхТС объекта исходяиз экстремальногозначениявыбранногопоказателя F оптимизации процесса диагностирования согласно условию
исходяиз экстремальногозначениявыбранногопоказателя F оптимизации процесса диагностирования согласно условию































 .
.
При решении задачи будут использоваться следующие методы [60–62]. 1. Метод динамического программирования (МДП), позволяющий получить оптимальныйрезультат. В качествепоказателейоптимизации приэтом
будут использоваться:
–средние затраты на распознавание ТС объекта, т. е. усредненные по всем ветвям Gr ГПД затраты ресурсов (временных или материальных), необходимых для выполнения проверок

 при определении ТС, в котором находится объект;
при определении ТС, в котором находится объект;
–средняя информативность ГПД объекта, т. е. количество информации, получаемой при выполнении проверок

 , снимающей исходную неопределенность ТС объекта, усредненное по всем ветвям Gr ГПД;
, снимающей исходную неопределенность ТС объекта, усредненное по всем ветвям Gr ГПД;
–средняя полезность информации, получаемой при распознавании ТС объекта (на основе использования меры полезности информации, предложенной А. А. Харкевичем). В самом общем случае полезность информации оценивается величиной




 ,
,
–где Р1 и Р0 – вероятности достижения цели (распознавания ТС объекта) после и до получения информации;
–средняя достоверность распознавания ТС объекта, т. е. вероятность правильного определения ТС, в котором находится объект, усредненная по всем ветвям Gr ГПД.
2. Метод ветвей и границ (МВГ), позволяющий получить близкий к оптимальному результат, но с меньшими вычислительными затратами. При этом в качестве критериев выбора наилучшей проверки для выполнения в каждом из рассматриваемых ИС Rk S будут использоваться следующие:
–минимум нижней границы средних затрат;
–максимум верхней границы информативности;
–максимум верхней границы полезности получаемой информации.
267
Квалиметрия моделей и полимодельных комплексов
3. Последовательный метод выполнения проверок, который не гарантирует получение оптимального результата, но является наиболее простым с точки зрения вычислительной сложности. Критериями выбора наилучших проверок при использовании этого метода будут:
–минимальная цена выполняемой проверки;
–максимальная информативность проверки;
–максимальная полезность получаемой информации;
–максимальная достоверность проверки;
–максимальная производительность проверки;
–максимальная ценность информации, получаемой при выполнении проверки (на основе меры ценности информации, предложенной В. И. Корогодиным). В данном случае ценность информации оценивается величиной


 ,
,
–где Р1 и Р0 – вероятности достижения цели (распознавания ТС объекта) после и до получения информации;
–максимальная вероятность распознавания ТС объекта.
II. Методы решения
1. Метод динамического программирования
Построение ГПД методом динамического программирования выполняется в три этапа.
1.1. Определение множества Ω = {R k | Rk S} информационных состояний, представляющих собой подмножества «подозреваемых» ТС, в одном из которых может находиться объект, а также подмножеств
 разрешенных (допустимых) в этих ИС Rk S проверок по условию (формула
разрешенных (допустимых) в этих ИС Rk S проверок по условию (формула
(6.55)).ПриэтомбудемразличатьконечныеИСRi = {Si} |
|
|
начальное |
|||
ИС R22 = {S1, S2,S3, S4, S5} и промежуточные ИС Rk S |
|
|
|
. К примеру, |
||
R6 = {S1, S2}, R16 = {S1, S2, S3}, и т. д. |
|
|
|
|
|
|
Любая из проверок |
, выполняемых в ИС Rk в соответствии с ото- |
|||||
бражением (формула (6.52)), может иметь ωkj исходов |
|
|
, каж- |
|||
дый из которых также представляет собой ИС, но состоящее уже из мень- |
||||||
шего числа элементов, т. е. |
. |
|
|
|
|
|
1.2. Выбор оптимальной проверки |
в каждом из ИС Rk Ω, на- |
|||||
чиная с ИС |
, для которых |
card{Rk} =2, и заканчивая началь- |
||||
ным ИС R22, для которого card{R22} =5, по условиям (в зависимости от вы- |
||||||
бранного показателя оптимизации): |
|
|
|
|
|
|
|
|
; |
|
(6.56) |
||
|
|
; |
|
(6.57) |
||
268
6. Примеры решения задач по оцениванию качества моделей и полимодельных комплексов
|
; |
(6.58) |
|
. |
(6.59) |
Здесь |
– средние затраты на реализацию Rk-подпрограммы, под |
|
которой понимается часть Gk графа G, получаемая выделением в нем любой вершины Rk S вместе с выходящими из нее путями и областью ее достижимости (множество вершин, достижимых из Rk, в том числе и конечных



 ;
;

 – информативность, т. е. количество диагностической информации, получаемой при реализации Rk-подпрограммы;
– информативность, т. е. количество диагностической информации, получаемой при реализации Rk-подпрограммы;

 – полезность информации, получаемой при реализации Rk подпрограммы;
– полезность информации, получаемой при реализации Rk подпрограммы;
– достоверность Rk-подпрограммы.
Значения |
, |
, |
|
и |
определяются по следую- |
||||
щим рекуррентным формулам, соответственно: |
|
|
|
||||||
|
|
|
|
|
|
|
; |
|
(6.60) |
|
|
|
|
|
|
|
; |
|
(6.61) |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
; |
(6.62) |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
, |
|
(6.63) |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
||
где
 –вероятностьисходапроверки,определяемаяпоформуле(6.54);
–вероятностьисходапроверки,определяемаяпоформуле(6.54);  – достоверность исхода проверки;
– достоверность исхода проверки;
v – порядковый номер этого исхода;



 – рекуррентные добавки, характеризующие, соответственно, стоимость, информативность, полезность и достоверность последующих проверок, которые нужно вы-
– рекуррентные добавки, характеризующие, соответственно, стоимость, информативность, полезность и достоверность последующих проверок, которые нужно вы-
полнить, чтобы из ИС

 достичь конечного ИС
достичь конечного ИС

 .
.
ЕслиполученноеврезультатевыполненияпроверкиИС являетсяконечным,т.е.
являетсяконечным,т.е.



 ,то,соответственно,
,то,соответственно,












поскольку проверки в конечных ИС не выполняются.
На каждом шаге работы алгоритма рекуррентно учитываются результаты предшествующих вычислений.
1.3. Построение гибкой программы диагностирования объекта. В качестве первой проверки в синтезируемой ГПД выбирается оптимальная про-
269
Квалиметрия моделей и полимодельных комплексов
верка |
, выбранная по условиям формул (6.56)–(6.59) для начально- |
го ИС R22 = {S1, S2,S3, S4, S5}. |
|
Построенные в виде ориентированных графов оптимальные ГПД пред-
ставлены на рис. 6.31–6.34. Соответствующие этим графам упорядоченные
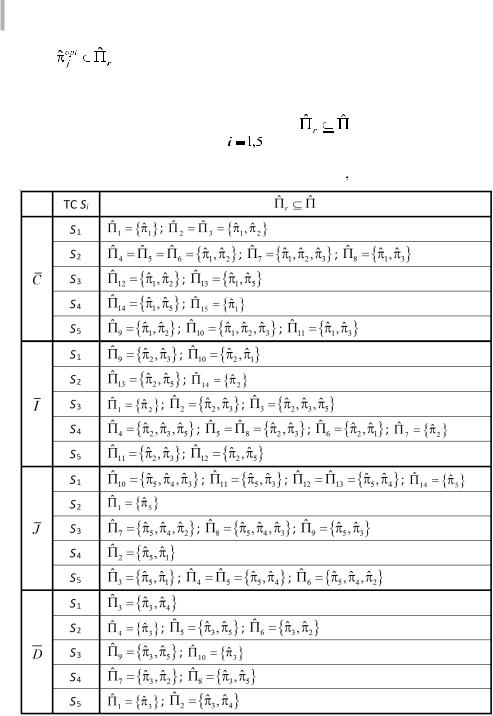
(поочередностиихпроверки)подмножества |
,необходимыедлярас- |
|
познавания всех заданных ТС Si ( |
), представлены в табл. 6.31. |
|
Табл. 6.31. Подмножества проверок, распознающие ТС Si (


 ).
).
270