

4700
.pdf21
–
б)
2. |
П |
|
у |
3. |
П |
|
х |
Окончание табл. 5
4. |
П |
|
|
|
|
z |
|
|
|
|
|
|
|
|
22
5. |
В |
|
|
|
|
х |
|
|
|
|
|
|
|
|
4.Задание по работе
4.1.Ознакомиться с назначением и классификацией ПР.
4.2.Рассмотреть структуру робота с трехподвижным манипулятором.
4.3.Изучить основные понятия и определения робототехники.
4.4.Изучить используемые системы координат руки манипулятора.
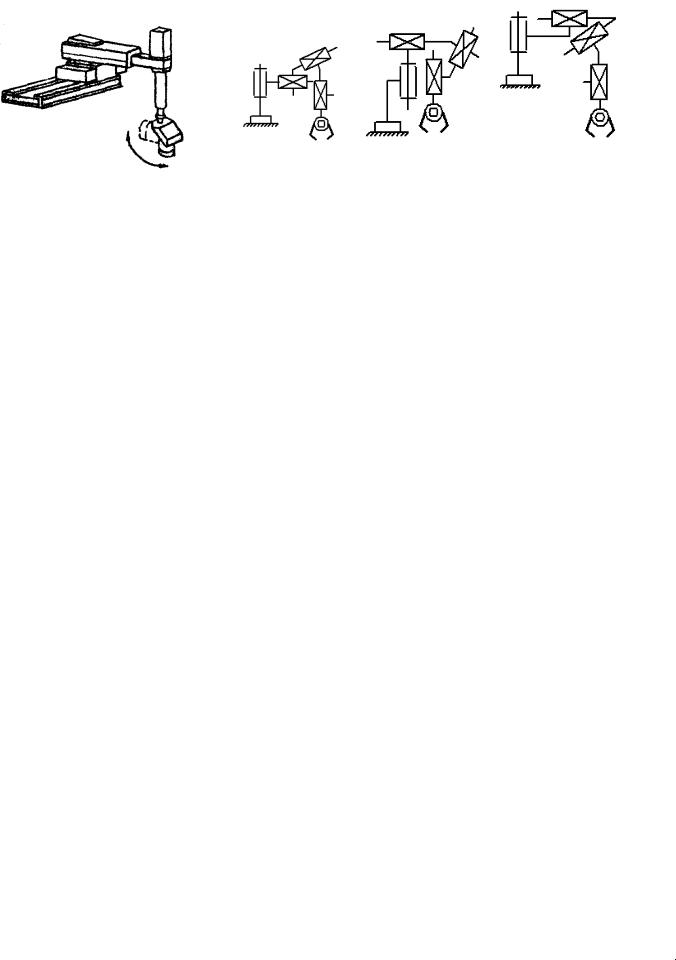
4.5.Рассмотреть базовые компоновки ПР.
4.6.Научиться составлять структурно-кинематические схемы ПР.
5.Содержание отчета
5.1.Название и цель работы.
5.2.Таблица классификации роботов.
5.3.Робот с трехподвижным манипулятором.
5.4.Схемы систем координат руки манипулятора.
5.5.Схема ориентации кинематических пар и рабочего органа относительно осей координат.
5.6.Схемы ПР, работающих в прямоугольной, цилиндрической, сферической, ангулярной системах координат.
5.7.Обозначения структурно-кинематических схем ПР.
5.8.Таблица с типами крепления ПР с элементами установок и условными обозначениями.
5.9.Пример этапов и способов построения структурно-кинематических схем ПР.
5.10.Разработать структурно-кинематическую схему ПР согласно варианту задания:
Вариант |
1 |
2 |
3 |
Формула |
1В2П/ПРТ/-Z |
1В2П/ПРТ/-Z |
1В1П/ПРТ/-Z |
Формула |
1В3П/КП/+Y |
1В3П/ПТ/-Y |
1В2П/ПТ/+Y |
Формула |
1В1П/СК/+Y |
1В1П/СК/-Y |
1В2П/СК/+Х |
Формула |
ВхВzПyПzВyПx/ОП/+X |
A1вzB2пzС3вyD4вх/КП/–Z |
ВzВyПyПxВyПy/КП/–X |
Вариант |
4 |
5 |
6 |
Формула |
2В1П/ПРТ/-Z |
2В2П/ПРТ/-Z |
2В3П/ПРТ/-Z |
Формула |
1В1П/ПТ/+Z |
2В2П/ПТ/-Х |
2В2П/ПТ/+Х |
Формула |
2В/СК/-Z |
2П/СК/+Х |
2В1П/СК/+Y |
23
Формула |
ПyПyВzПzПxВz/СК/–Z |
ВyПyВzПxВyПz/КП/–Z |
ВzПyПxВzПyВy/СК/–Z |
Вариант |
7 |
8 |
9 |
Формула |
2В1П/ПРТ/-Х |
1В2П/ПРТ/+X |
1П/СК/+Y |
Формула |
2В2П/СК/-Y |
3В1П/КП/+Y |
3В2П/ОП/-Z |
Формула |
3В2П/ОП/-Z |
4В/КП/-Z |
1В3П/ПРТ/-Z |
Формула |
ВyПyПxВzПyВy/ПТ/+Y |
ПzВyПxВzПyВy/ОП/+Y |
ПzПzВyПyПxВy/ОП/+Z |
Вариант |
10 |
11 |
12 |
Формула |
1В2П/ОП/+Z |
1В3П/ПТ/-Z |
3В3П/ПРТ/-Y |
Формула |
3В/ПТ/+X |
3В/ОП/-Y |
4П/СК/+X |
Формула |
1В2П/ПРТ/-Y |
1В2П/СК/+Х |
2В1П/ПТ/-Z |
Формула |
ПzВyПyПxВzПyВy/СК/–Y |
ВyВyПzПyПxВz/ПТ/–Z |
ВyВzВхПxВz/ПРТ/–Z |
Вариант |
13 |
14 |
15 |
Формула |
3П/ПРТ/-Z |
1В3П/ПРТ/-Z |
1В1П/ПРТ/-X |
Формула |
1В1П/ПТ/-Z |
2В1П/ПТ/+Z |
3П/ПРТ/+Z |
Формула |
2В/СК/+Y |
1В1П/СК/-Х |
2В2П/КП/-Z |
Формула |
ПyПzПхВxПz/ПРТ/–Z |
ПxВzВyВхВz/ПРТ/+Z |
ПyВyВzПyВyПx/СК/+Z |
Вариант |
16 |
17 |
18 |
Формула |
2П/ПРТ/-Z |
1П/ПРТ/-Z |
3В/ПРТ/+Z |
Формула |
1В2П/ПТ/-Y |
2В1П/ПТ/-Z |
2В2П/ОП/+Y |
Формула |
1В2П/СК/-Х |
1В2П/СК/-Y |
1В2П/ПТ/-Z |
Формула |
ПzВyПxВzПyВyПx/ОП/–Z |
ВxВyВzВyВz/ПРТ/+Y |
ПyПyВzПxВzВy/ПТ/–Z |
Вариант |
19 |
20 |
|
Формула |
2В2П/СК/+Y |
5В/СК/+Y |
|
Формула |
4В1П/КП/+Z |
4В/ОП/+Y |
|
Формула |
2В/ПРТ/-Z |
1В4П/ПРТ/-Z |
|
Формула |
ВzВzПyВyВxПy/ОП/+Z |
A1вyB2пzС3вxD4вzE5пx/ПТ/ |
|
|
|
–Y |
|
6.Контрольные вопросы, выносимые на защиту работы
6.1.Понятие промышленного робота и манипулятора.
6.2.Классификация промышленных роботов.
6.3.Основные понятия и определения робототехники.
6.4.Применяемые системы координат «руки» манипулятора.
6.5.Обозначения структурно-кинематических схем ПР.
6.6.Крепление промышленных роботов.
6.7.Этапы и основные способы построения структурно-кинематических
схем ПР.

24
Лабораторная работа № 2
Построение рабочей зоны промышленного робота
Цель работы: разработка схем рабочей зоны промышленного робота.
Рабочая зона ПР – пространство, в котором может находиться рабочий орган манипулятора при выполнении работы.
Рабочую зону характеризуют линейные (поступательные) и угловые (вращательные) перемещения подвижных звеньев манипулятора. Конфигурация и размеры рабочей зоны ПР определяются размерами, формой и расположением рабочих и технологических позиций обслуживаемого оборудования.
Примеры построения рабочей зоны ПР приведены в табл. 1 и 2.
Таблица 1
Структурное построение рабочей зоны ПР
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Bz |
|
|
|
|
|
|
|
|
|
П |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Пy |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Пx |
|
|
z |
z |
||
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
||||
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
Bx |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
КП/2В3П/-х |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Переносные степени |
|
|
|
|
|
|
|
|
|
|
|
подвижности: Вz, Пz, Пу, |
|
|
|
|
|
|
|
|
|
|
|
ориентирующие - Пх, Вх. |
|
|
|
|
|
|
|
|
|
|
|
|
|

25
|
|
|
|
|
Продолжение табл. 1 |
|
|
движения |
Передвижение |
Характер |
Этапы построения рабочей |
|
|
Степень |
манипулятора по |
перемещения |
зоны |
|
||
степеням подвижности |
Виды |
Символ |
|
|
||
|
|
|
|
|
||
|
|
|
движения |
|
|
|
|
|
|
|
|
|
|
1 |
|
2 |
3 |
4 |
5 |
|
1. |
|
|
Возвратн |
|
|
|
|
|
|
о |
Пz |
|
|
|
|
|
поступате |
|
|
|
|
|
|
льное |
|
|
|
|
|
|
относите |
|
|
|
|
|
|
льно оси |
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
2. |
|
|
|
|
|
|
|
|
|
- |
Пz |
|
|
|
|
|
|
|
|
|
3. |
|
|
Возвратн |
|
|
|
|
|
|
о |
|
|
|
|
|
|
поступате |
Пу |
|
|
|
|
|
льное |
|
|
|
|
|
|
относите |
|
|
|
|
|
|
льно оси |
|
|
|
|
|
|
у |
|
|
|
|
|
|
|
|
|
|
4. |
|
|
- |
|
|
|
|
|
|
|
Пу |
|
|
|
|
|
|
|
|
|

26
Окончание табл. 1
5. |
|
Вращател |
|
|
|
|
ьное |
Вz |
|
|
|
относите |
α= |
|
|
|
льно оси |
180 |
|
|
|
z |
° |
|
|
|
|
|
|
Таблица 2
Структурное построение рабочей зоны ПР
Bz
R1
Bx
|
движения |
Передвижение |
|
Степень |
манипулятора по |
||
степеням подвижности |
|||
|
|
||
1 |
|
2 |
Bx R2
z
B
ОП/4В/+у Переносные степени
подвижности: Вz,Вх, В х, ориентирующие - Bх.
Характер |
Этапы построения рабочей |
|
перемещения |
зоны ПР |
|
Виды |
Символ |
|
движения |
|
|
|
|
|
3 |
4 |
5 |

|
27 |
|
|
|
|
|
|
|
|
1. |
|
Исходное |
|
|
|
|
положени |
|
|
|
|
е |
|
|
|
|
|
|
|
Окончание табл. 2
2. |
|
Вращател |
|
|
|
|
ьное в |
Вх |
|
|
|
шарнире |
Вх |
|
|
|
I |
=45 |
|
|
|
относите |
° |
|
|
|
льно оси |
|
|
|
|
х |
|
|
|
|
|
|
|
3. |
|
Вращател |
|
|
|
|
ьное в |
В х |
|
|
|
шарнире |
В х |
|
|
|
2 |
=90 |
|
|
|
относите |
° |
|
|
|
льно оси |
|
|
|
|
х |
|
|
|
|
|
|
|
4. |
|
Вращател |
|
|
|
|
ьное в |
Вх |
|
|
|
шарнире |
Вх |
|
|
|
I |
=45 |
|
|
|
относите |
° |
|
|
|
льно оси |
|
|
|
|
х |
|
|
|
|
|
|
|

|
28 |
|
|
|
|
|
|
|
|
5. |
|
Вращател |
|
|
|
|
ьное |
Вz |
|
|
|
относите |
Вz |
|
|
|
льно оси |
= |
|
|
|
z |
180 |
|
|
|
|
° |
|
|
|
|
|
|
1.Задание по работе
1.1.Ознакомиться со способами построения рабочей зоны ПР.
1.2.Разработать схему рабочей зоны ПР по заданию преподавателя.
2.Содержание отчета
2.1.Название и цель работы.
2.2.Примеры структурных построений рабочих зон ПР.
2.3.Схема рабочей зоны ПР согласно варианту задания
(предварительно построить структурно-кинематическая схему ПР):
Вариант |
1 |
2 |
3 |
4 |
5 |
Формула |
2П/ПРТ/-Z |
1В1П/КП/+Y |
1В1П/ПТ/-Z |
2В/СК/-Z |
3П/СК/-Х |
|
|
|
|
|
|
Вариант |
6 |
7 |
8 |
9 |
10 |
Формула |
1В2П/СК/+Y |
1В2П/ОП/-Z |
1В2П/КП/+Y |
2В1П/СК/-Х |
2В1П/ПРТ/+Y |
Вариант |
11 |
12 |
13 |
14 |
15 |
Формула |
3П/ПРТ/-Z |
2В1П/ПТ/-Z |
1В2П/ПТ/-Z |
2В/ПТ/+Y |
2В/ОП/+Х |
Вариант |
16 |
17 |
18 |
19 |
20 |
Формула |
1В1П/СК/-Х |
3В/ОП/-Y |
4П/ОП/-Z |
1В3П/ОП/+Y |
2В/ОП/+Z |
3.Контрольные вопросы, выносимые на защиту работы
3.1.Определение рабочей зоны промышленного робота.
3.2.Этапы построения рабочей зоны.

29
Лабораторная работа № 3
Изучение устройства и конструкции робота-штабелера
Цель работы: ознакомление с электрической схемой, тумблерами управления, приобретение практических навыков управления роботом.
1. Описание робота-штабелера
Робот-штабелер предназначен для погрузки и разгрузки плитных материалов. Его основными элементами являются шкаф автоматики 1, пульт ручного управления 2, манипулятор 3, корзина захвата 4, двигатели 5 (рис. 1).
Рис. 1. Схема промышленного робота
2. Описание электрической схемы и тумблеров управления.
30
Автомат А1, расположенный на двери электрического шкафа, подает напряжение на робот (рис. 2).
Питание схемы управления осуществляется от трансформатора Т1, имеющего выводы на 127 В и 220 В.
Кнопки управления роботом S1 S8 и S15 S18 (рис. 3) расположены на выносном пульте управления (рис. 1).
При нажатии кнопки S1 катушка пускателя К1 оказывается под напряжением и замыкает контакты К1, при этом двигатель М1 получает питание и происходит движение каретки вверх. Кнопка S1 блокируется нормально-разомкнутым контактом К1.1 пускателя К1. Кнопка S2 осуществляет остановку движения каретки вверх.
При нажатии кнопки S3 катушка К2 получает питание и происходит пуск двигателя М2, при этом каретка перемещается вверх от двух двигателей, т.к. в цепи катушки К1 находится нормально-разомкнутый контакт катушки К2. Остановка ускоренного подъема от двух двигателей производится нажатием кнопки S4.
На вертикальной стойке робота текстолитовые пластинки, а на каретке конечные выключатели S9 и S10 выплняют роль ограничения движения каретки вверх. При их срабатывании катушка К5 получает питание и разрывает свой нормально-замкнутый контакт в цепи катушек К1 и К2, при этом происходит остановка двух двигателей при их работе на подъем каретки.
Аналогичным образом работает схема перемещения каретки вниз. Конечные выключатели S11 и S12 предусмотрены для останова каретки в нижней точке.
При нажатии кнопки S15 происходит сжимание корзины, т.к. катушка К9 получает питание и кнопка S15 блокируется нормально-разомкнутым контактом К9.1. Остановка двигателя М3 осуществляется кнопкой S16. В схеме предусмотрены конечные выключатели, ограничивающие раскрытие и закрытие корзины (S13 и S14).
Расжимание корзины осуществляется при нажатии кнопки S17.
3.Задание по работе
3.1.Разобраться с работой электрической схемы и тумблерами управления.
3.2.Включить питание робота и выполнить возможные манипуляции с
захватом.
3.3.Измерить время и расстояние перемещения захвата, определить линейную скорость при движении вверх, вниз.
3.4. Определить коэффициент передачи: частота вращения двигателя - линейная скорость.
4.Содержание отчета
4.1.Начертить структурную схему робота.