

4700
.pdf11
Таблица 2
Наиболее распространена ориентация степеней подвижности представлена на рис. 5.
Рис. 5. Ориентация кинематических пар и рабочего органа относительно осей координат

12
В большинстве случаев конструктивно манипулятор ПР выполняется по одной из базовых компоновок, изображенных на рис. 6 – 10. На них под буквой «б» показаны структурно-кинематические схемы, элементы которых приведены в табл. 3 и 4. Кроме структурно-кинематической схемы, каждый ПР имеет символическое обозначение (формулу), состоящее из переносных и ориентирующих степеней подвижности манипулятора. На рис. 6 ПР обладает тремя поступательными и одной вращательной (ориентирующей) степенями подвижности, поэтому его символическое обозначение (формула) 1В3П. Для робота на рис. 7 символическое обозначение 2В2П, так как имеются переносные степени подвижности – одна вращательная две поступательные, ориентирующие степени подвижности – одна вращательная. Формула роботов на рис. 8 и 9 – 2В1П. Для пятого ПР на рис. 10 символическое обозначение 4В1П.
Рис. 6. Конструкция ПР, работающего в прямоугольной системе координат, с рабочей зоной (а) и его структурно-кинематическая схема (б)

13
1
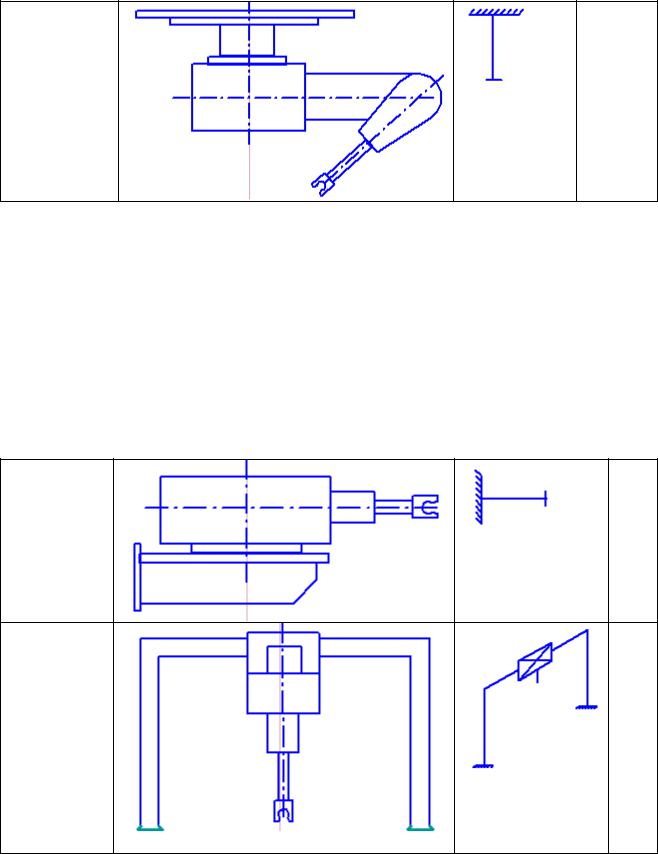
Рис. 7. Конструкция ПР, работающего в цилиндрической системе кооринат, с рабочей зоной (а) и его структурно-кинематическая схема (б)
Рис. 8. Конструкция ПР, работающего в сферической системе координат, с рабочей зоной (а) и его структурно-кинематическая схема (б)

14
Рис. 9. Конструкция ПР, работающего в ангулярной системе координат, с рабочей зоной (а) и его структурно-кинематическая схема (б)


 2
2
Рис. 10. Конструкция ПР, работающего в ангулярной системе координат, с рабочей зоной (а) и его структурно-кинематическая схема (б)

|
15 |
|
|
|
|
|
|
|
|
3. Жесткое |
|
|
|
С целью |
(неподвижное |
|
|
|
упрощения |
) соединение: |
|
|
|
иногда |
а) звеньев |
|
|
|
элемент |
|
|
|
|
жесткого |
|
|
|
|
соединения |
|
|
|
|
не |
б) |
|
|
|
показывают |
кинематическ |
|
|
|
, при этом |
ой пары и |
|
|
|
не должен |
звена |
|
|
|
меняться |
в) двух |
|
|
|
физический |
кинематическ |
|
|
|
смысл |
их пар |
|
|
|
кинематиче |
|
|
|
|
ской пары и |
|
|
|
|
в целом |
|
|
|
|
структурно |
|
|
|
|
й схемы |
Таблица 3
Обозначения структурно-кинематических схем ПР
Элементы |
Условные обозначения элементов |
Коли |
Примечание |
|
структурно- |
|
|
честв |
|
Принятые в России |
Согласно |
|
||
кинематическ |
о |
|
||
|
стандарту |
|
||
их и |
|
степе |
|
|
|
JI5 0138 |
|
||
функциональ |
|
ней |
|
|
|
(Япония) |
|
||
ных схем ПР |
|
подв |
|
|
|
|
|
||
|
|
|
ижно |
|
|
|
|
сти |
|
|
|
|
ПР |
|
1 |
2 |
3 |
4 |
5 |
1. Звено |
|
|
|
|
(стержень) |
|
|
|
|
|
|
|
|
|
2. |
|
|
|
|
Неподвижное |
|
|
|
|
крепление |
|
|
|
|
звена |
|
|
|
|
|
|
|
|
|

16
4. Подвижное |
|
|
1 |
Обозначают |
соединение |
|
|
|
ся обычно |
возвратно- |
|
|
|
переносные |
поступательн |
|
|
|
степени |
ого движения |
|
|
|
подвижност |
|
|
|
|
и |
5. Винтовое |
|
|
2 |
Поступател |
соединение |
|
|
|
ьное и |
поступательн |
|
|
|
вращательн |
ого и |
|
|
|
ое |
вращательног |
|
|
|
движения |
о движения |
|
|
|
взаимосвяза |
|
|
|
|
ны |
1 |
2 |
3 |
4 |
5 |
|
|
|
|
|
6. |
|
|
2 |
Поступател |
Цилиндричес |
|
|
|
ьное и |
кое |
|
|
|
вращательн |
соединение |
|
|
|
ое |
поступательн |
|
|
|
движения |
ого и |
|
|
|
независимы |
вращательног |
|
|
|
|
о движения |
|
|
|
|
7. Плоское |
|
|
1 |
Обозначают |
шарнирное |
|
|
|
ся как |
соединение |
|
|
|
правило, |
вращательног |
|
|
|
переносные |
о движения |
|
|
1 |
степени |
вокруг |
|
|
|
подвижност |
поперечной |
|
|
|
и |
(а) и |
|
|
|
|
продольной |
|
|
|
|
(б) осей |
|
|
|
|
|
|
|
|
|
|
|
|
Продолжение табл. 3 |
|
Окончание табл. 3

17
8. |
|
|
2 |
,, |
Соединение |
|
|
|
|
поступательн |
|
|
|
|
ого и |
|
|
|
|
вращательног |
|
|
|
|
о движения |
|
|
|
|
9. |
|
|
2 |
,, |
Соединения с |
|
|
|
|
двумя |
|
|
|
|
вращательны |
|
|
|
|
ми |
|
|
|
|
перемещения |
|
|
2 |
|
ми: шаровой |
|
|
|
|
шарнир с |
|
|
|
|
пальцем (а), |
|
|
|
|
шарнирные |
|
|
|
|
соединения |
|
|
|
|
(б) |
|
|
|
|
10. |
|
|
3 |
а) |
Соединения с |
|
|
|
карданный |
тремя |
|
|
|
шарнир, |
вращательны |
|
|
3 |
шарнир |
ми |
|
|
|
Гука |
перемещения |
|
|
|
б) зубчатая |
ми |
|
|
|
диф. |
|
|
|
|
передача |
11. |
|
|
1 |
Обозначени |
Кинематичес |
|
|
|
е |
кая пара с |
|
|
|
ориентирую |
одной |
|
|
|
щих |
степенью |
|
|
|
степени |
подвижности |
|
|
|
подвижност |
|
|
|
|
и |
12. |
|
|
2 |
,, |
Кинематичес |
|
|
|
|
кая пара с |
|
|
|
|
двумя |
|
|
|
|
степенями |
|
|
|
|
подвижности |
|
|
|
|
13. |
|
|
3 |
,, |
Кинематичес |
|
|
|
|
кая пара с |
|
|
|
|
тремя |
|
|
|
|
степенями |
|
|
|
|
подвижности |
|
|
|
|

18
14. Рабочий орган:
а) захватное устройство; б)
технологичес
кий
инструмент
Таблица 4
Типы крепления ПР с элементами установок и условными обозначениями
Способ |
Эскиз |
Условное |
Символ |
установки |
|
обозначения |
|
(крепления) |
|
|
|
ПР |
|
|
|
1 |
2 |
3 |
4 |
1. Установка |
|
|
ОП |
на |
|
|
|
основании, |
|
|
|
на полу |
|
|
|
|
|
|
|
2. Установка |
|
|
КП |
на колонне |
|
|
(ПК) |
на полу |
|
|
|
|
|
|
|
19
ПТ
3.
Подвесной крепление к потолку
Окончание табл. 4
СК
4.
Крепление к стене на кронштейне
ПР
5. Т
Портальны
й
Этапы и основные способы построения структурно-кинематических схем ПР приведены в табл. 5., при этом их правильность проверяется по трем условиям:

20
1.Структура ПР должна быть замкнутой, т.е. начинаем построение со способа крепления и установки (табл. 4), а заканчиваем рабочим органом.
2.У кинематической пары должен оставаться свободный соединительный элемент. Исключением является кинематическая пара портального крепления ПР, позволяющая последнему двигаться от одной стойки крепления к другой, а также различные виды шарнирных соединений
(табл. 3).
3.Рабочий орган должен совершать все перемещения (степени
подвижности), представленные на схеме.
Принцип построения структурно-кинематических схем ПР –
последующую кинематическую пару необходимо подсоединять к подвижному звену предыдущей.
Таблица 5
Этапы и способы построения структурно-кинематических схем ПР
|
|
|
Bz |
|
|
|
|
|
|
|
|
|
1- крепление ПРОП |
||
|
|
|
|
|
|
|
|
|
Пy |
|
|
||||
|
|
|
|
|
|
|
|
|
|
2- символическое (буквенное) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
Пx |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
обозначение ПР2В3П: |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
а) переносные степени |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
подвижности – Пх, Вz, Пу,Пz; |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
б) ориентирующие степени |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
подвижностиВх |
|
|
|
|
|
|
|
|
Пz |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
3- ориентация рабочего органа |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
(ЗУ) ПР –z |
|
|
|
|
|
|
|
|
Bx |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Передвижение |
С |
|
|
Способы построения структурно-кинематических |
|||||||||||
манипулятора по |
и |
|
|
|
|
|
|
схем ПР |
|
||||||
степеням подвижности |
м |
|
|
первый |
|
второй |
|
третий |
|||||||
|
|
|
|
|
|
во |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
л |
|
|
|
|
|
|
|
|
|
1 |
|
|
2 |
3 |
|
|
4 |
|
5 |
||||||
1. |
|
|
|
|
|
В |
|
|
|
|
|
|
а) |
|
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|