

4688
.pdf31
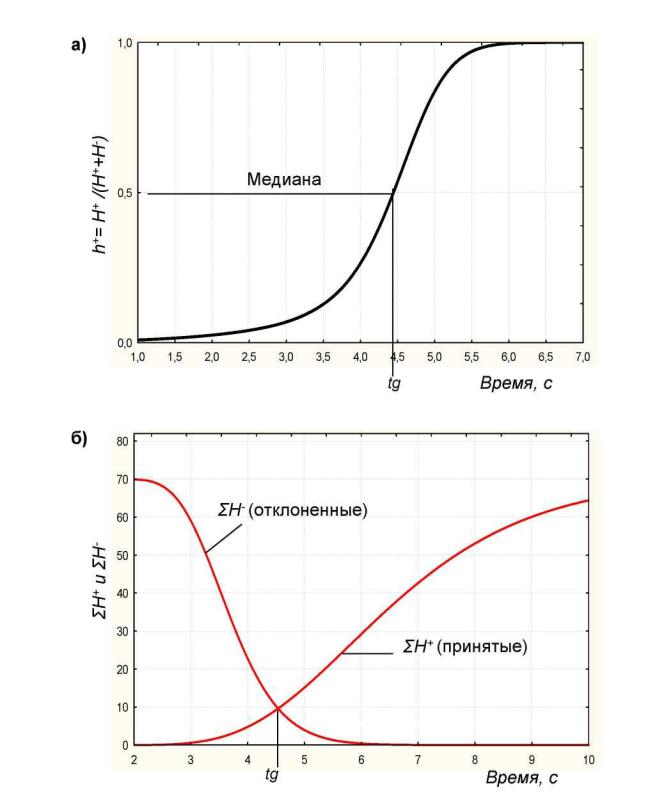
Определить граничный интервал tG как интервал, который половиной водителей был принят и половиной отклонен. Интервал можно определить по медиане распределения, образованного следующим образом:
h |
H |
(1) |
, |
H H
где H – функция распределения принятых интервалов;
H – функция распределения отклоненных интервалов;
h – функция распределения граничных интервалов.
Величина граничного интервала определяется по значению 0,5
распределения h . Распределение показывает вероятность, с которой водителями может быть принят временной интервал меньше и равный соответствующему значению (рис. 2, а).
Определить граничный интервал, как интервал, для которого число временных интервалов меньше граничного интервала, которые были отклонены водителями, равно числу принятых интервалов, больших, чем граничный интервал. При этом граничный интервал определяется точкой пересечения прямой (для принятых интервалов) и обратной (для отклоненных интервалов) кумулятивных кривых (рис. 2, б).
32
Рис. 2. Определение граничных интервалов
33
Следует отметить, что при проведении обследований, направленных на определение ключевых параметров, описывающих движение транспортных потоков на нерегулируемых пересечениях, необходимо помнить следующее:
1.На второстепенном подходе в течение исследуемого периода всегда должна быть очередь, состоящая как минимум из 5 – 6 транспортных средств.
2.При измерении принятых водителями второстепенного направления временных интервалов между транспортными средствами в главном направлении должны учитываться лишь действительно принятые интервалы.
Отклоненные интервалы в данном случае не учитываются.
3. Число обследований (измерений) должно быть достаточным для обеспечения статистической значимости предполагаемых результатов.
Вслучае, когда величина интервала между транспортными средствами
вглавном направлении является значительно больше граничного интервала,
после первого транспортного средства во второстепенном направлении начинают движение и другие транспортные средства с определенным временным интервалом, определенно меньшим, чем граничный интервал.
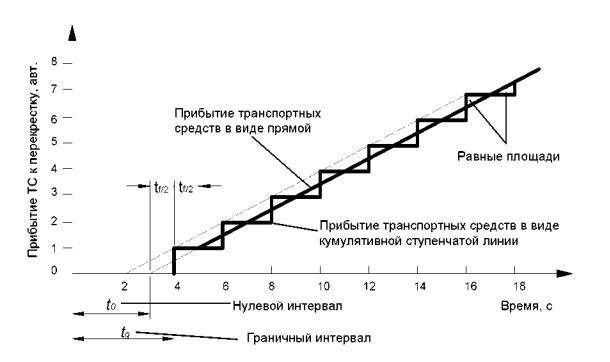
Таким интервалом называется интервал следования, который главным образом зависит от наличия у водителей возможности свободно ориентироваться (видимость). Практика показала, что величина интервала следования представляет собой приблизительно постоянную величину. В
этом случае закон движения второстепенного потока на нерегулируемом пересечении можно описать как (рис. 3):
n |
t tg |
1, |
(2) |
|
|||
|
t f |
|
|
34
Рис. 3. Закон движения второстепенного потока на нерегулируемом
пересечении
где n – число транспортных средств, которые успевают проехать во второстепенном направлении при величине временного интервала между транспортными средствами в главном направлении равной t;
tg – граничный интервал; t f – интервал следования.
Поскольку на перекресток въехать может лишь целое число транспортных средств, число n всегда должно округляться. В результате процесс разъезда транспортных средств на нерегулируемом пересечении можно представить в виде ступенчатой кумулятивной кривой (рис. 3).
Минимальный интервал, который необходимо для въезда на перекресток первому транспортному средству и представляет собой граничный интервал.
Минимальный интервал, необходимый для разъезда n транспортных средств
можно при этом определить с помощью преобразования формулы (2):
t tg n 1 t f |
(3) |
35
Процесс разъезда также можно представить в виде примой линии (см.
рис.3). При этом для полного учета последнего из n транспортного средства
необходимо к интервалу, полученному по формуле (3) добавить t f |
/2: |
|||||
t tg n 1 t f |
t f |
|
|
|||
|
|
|||||
|
2 |
|
|
|||
или |
|
|
|
|
|
|
t nt f |
tg |
t f |
|
(4) |
||
|
||||||
|
2 |
|
|
|
|
|
Угол наклона прямой, представленной на рис. 3, зависит от величины
интервала следования. Пересечение этой прямой с осью времени определяет временной интервал t0 tg t f / 2 , который называется начальным (нулевым)
интервалом. Заменив t0 на tg в формуле (4), получим следующее:
0 |
|
|
|
|
|
|
|
t0 |
|
, |
(5) |
||
n t |
|
|||||
|
|
t |
f |
|
|
|
|
|
|
|
|
||
при t t0 , t f t0
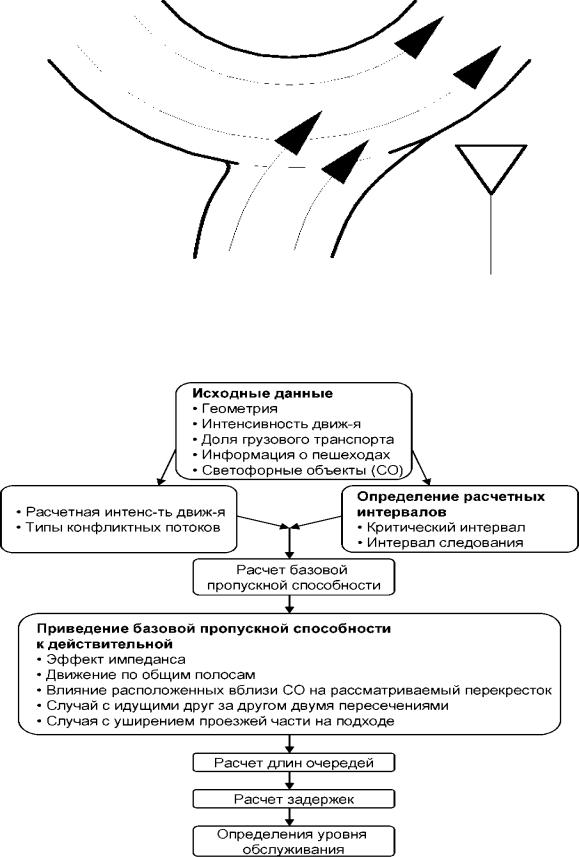
Кольцевые пересечения с точки зрения техники разработки формул для оценки пропускной способности пересечений такого типа являются частным случаем нерегулируемых пересечений. Это легко можно увидеть при рассмотрении одного из подходов к обустройству кольцевого движения
(рис.4). Рассмотрим более подробно основу методики, используемой,
например, американскими учеными. На рис. 5 представлена блок-схема,
отражающая последовательность действий при проектировании нерегулируемого пересечения.
36
Рис. 4. Анализ подхода к обустройству кольцевого движения
Рис. 5. Методология проектирования нерегулируемых пересечений
37
Первым этапом проектирования (оценки эффективности) является сбор имеющейся информации о геометрии, существующих или прогнозируемых интенсивностях движения пешеходных и транспортных потоков с учетом доли грузовых транспортных средств в потоке. Также собирается информация о светофорных объектах, расположенных рядом с рассматриваемы нерегулируемым пересечением, которые могут оказывать на него влияние. Здесь следует подчеркнуть, что процедура учета влияния светофорных объектов на рассматриваемое пересечение используется лишь в американской методике. Немецкая методика не включает в себя такой процедуры. Это может быть обосновано тем, что, по мнению немецких специалистов, светофорные объекты оказывают лишь незначительное влияние на рассматриваемое нерегулируемое пересечение. Применение такой процедуры лишь усложняет расчеты.
Следующим этапом является определение типов конфликтных потоков,
для которых в дальнейшем будут определяться базовые и действительные значения пропускной способности по соответствующим формулам и с использованием соответствующих процедур. Тип конфликтного потока зависит от того, сколько приоритетных потоков по отношению к рассматриваемому необходимо пересекать. Чем больше таких приоритетных потоков, тем меньше пропускная способность в рассматриваемом второстепенном направлении. Также здесь необходимо определить граничные интервалы и интервалы следования для каждого из типов конфликтных потоков (направлений).
Следующий этап представляет собой расчет базовой пропускной способности для каждого из направлений. Под базовой понимается пропускная способность такого второстепенного потока, которому приходится пересекать лишь один приоритетный поток. Так, например, в
современной германской методике для определения базовой пропускнойспособности применяется следующая формула:
38
|
|
|
qp |
|
t f |
|
|
|
|
3600 |
|
|
tg |
|
|
|
|
G |
|
3600 |
2 |
, |
(6) |
|||
|
e |
|
|
|
|
|||
|
|
|
||||||
i |
t f |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где Gi – базовая пропускная способность второстепенного |
потока i, |
|||||||
прив.ед/ч; |
|
|
|
|
|
|
|
|
qp – расчетная интенсивность приоритетного направления (1-го ранга), авт/ч; tg – средний граничный интервал, с;
tf – средний интервал следования, с.
Формула (6) расчета базовой пропускной способности основана на теории вероятности и зависит интенсивности движения, граничного интервала и интервала следования. Очевидно, что для применения такой формулы при проведении расчетов на разных перекрестках необходимо предварительно определить значения расчетных временных интервалов
(интервал следования и граничный интервал).
После того, как была получена базовая пропускная способность необходимо базовые условия привести к действительным. Здесь применяются дополнительные процедуры, учитывающие тип второстепенного направления. Учитывается особенность движения двух направлений по одной смешанной полосе движения, влияние расположенные вблизи СО на рассматриваемый перекресток, случаи с идущими друг за другом двумя нерегулируемыми пересечениями, когда получившееся сложное пересечение преодолевается в два этапа. Также учитывается влияние на пропускную способность уширения проезжей части на подходе к пересечению. Последними этапами, которые относятся к оценке уровня обслуживания, являются расчет задержек, длин очередей, и
соответствующих уровней обслуживания.
Определение пропускной способности
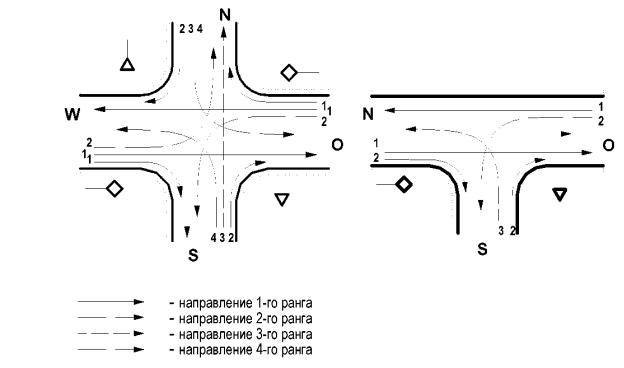
Не нерегулируемых пересечениях принято подразделять все транспортные потоки (направления потоков) на следующие типы:
1. направления, которые могут беспрепятственно осуществлять свое движение (ранг 1);
39
2. направления, которым приходится пропускать лишь один поток
(ранг 2);
3.направления, которым приходится пропускать потоки 1-го и 2-го рангов (ранг 3);
4.направления, которым приходится пропускать потоки 1-го и 2-го рангов (ранг 4).
Все четыре типа направлений транспортных потоков представлены на рис. 6.
Рис. 6. Типы транспортных потоков на нерегулируемых пересечениях Движение для автомобилей в потоке 2-го ранга возможно лишь в
случае, если в потоке 1-го ранга имеется достаточный временной интервал
(граничный интервал). Движение для автомобилей в потоке 3-го ранга возможно в случае, если в потоке 1-го и 2-го ранга имеется достаточный временной интервал, а также в потоке 2-го ранга отсутствует очередь,
скопившаяся в ожидании граничного интервала в потоке 1-го ранга.
Движение для автомобилей в потоке 4-го ранга возможно в случае,
если в потоке 1-го, 2-го, и 3-го ранга имеется достаточный временной интервал, а также в потоке 2-го и 3-го ранга отсутствует очередь,
40
скопившаяся в ожидании граничного интервала в потоках 1-го и 2-го рангов соответственно.
Пропускная способность для потока 2-го ранга определяется на основе формулы (6). Следующим этапом после определения пропускной способности для потока 2-го ранга является определение вероятности того,
что данный поток будет двигаться беспрепятственно по формуле:
p 1 |
N |
, |
(7) |
|
|||
02 |
C |
|
|
|
|
|
где p02 – вероятность беспрепятственного движения потока 2-го ранга;
N – интенсивность движения рассматриваемого потока, прив.ед/ч;
C – пропускная способность рассматриваемого потока, прив.ед/ч.
Пропускная способность потока 3-го ранга определяется исходя из формулы:
n |
|
C3 p02iG3 , |
(8) |
i 1 |
|
где G3 – базовая пропускная способность потока 3-го ранга, прив.ед/ч; |
|
n |
|
p02i – произведение вероятностей беспрепятственного движения |
всех |
i 1 |
|
потоков 2-го ранга, которым уступает рассматриваемый поток 3-го ранга.
Для потока 3-го ранга также необходимо определить вероятность беспрепятственного движения p03 .