

3731
.pdfА9 |
А10 |
|
А8 |
||
|
А7
А6  О
О 
А5
А4 А3 А2
А11 |
|
|
|
B6 B7 B8 |
B9 |
B10 |
B11 B0 |
А0 |
|
|
|
В5 В4 |
В3 |
В2 |
В1 |
А1 |
|
|
|
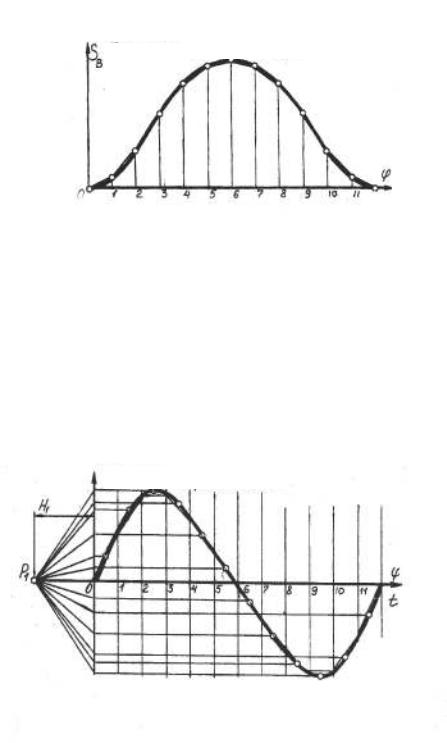
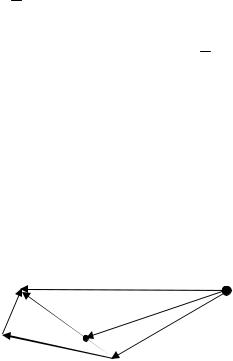
Рис. 2.1 Планы положений механизма
Графический способ определения кинематических характеристик механизма методом кинематических диаграмм
Данный способ заключается в определении графиков (кинематических диаграмм) изменения перемещения, скорости, ускорения в функции времени t. Пусть необходимо построить кинематические диаграммы S = f (t); V = f (t);
а= f (t) точки В кривошипно-ползунного механизма. Для этого:
1 Строим отрезок ℓ=ОО мм, изображающий время одного полного оборота кривошипа ОА в масштабе t.
|
|
= |
t |
|
, |
(2.2) |
|
t |
l |
||||||
|
|
|
|
||||
|
|
|
|
|
|||
где t – время одного полного оборота кривошипа, с |
|
||||||
t = 60 |
, |
(2.3) |
|||||
|
|
n |
|||||
n – частота вращения кривошипа, об/мин.
Отрезок ℓ=ОО делим на 12 равных частей. На плане положений механизма определяем расстояния В0В1; В0В2; В0В3 и т.д., откладываем их в одноименных точках 1; 2; 3 и т.д. Масштабный коэффициент S для оси перемещения диаграммы S = f (t) принимаем равный двум масштабным коэффициентам плана положений механизма S = 2 l .
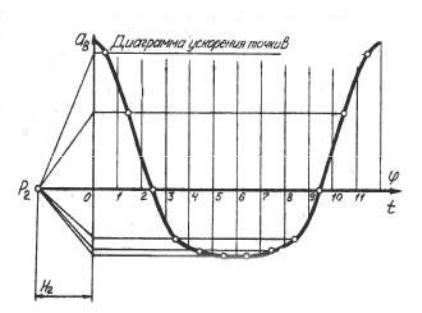
2 Соединив последовательно плавной кривой полученные точки 0; 1/; 2/; 3/ и т.д., получим диаграмму перемещения точки В (рис. 2.2). Диаграмма скорости точки В (V = f (t)) получается графическим дифференцированием диаграм-
мы S = f (t). Графическое дифференцирование выполняется методом хорд в следующей последовательности:
|
|
6' |
|
5' |
7' |
4' |
|
8' |
3' |
|
9' |
2' |
|
10' |
1' |
|
11' |
О
Рис. 2.2 Диаграмма перемещения точки В
а) под диаграммой S = f (t) строим параллельную систему координат V = f (t) и влево от точки О1 откладываем отрезок О1Р=Н1 [мм]. Из точки Р проводим лучи параллельно хордам 01/; 1/2/; 2/3/ до пересечения с осью 0S. От полученных точек проводим горизонтали до середины диапазонов, в которых проведены хорды. Соединив точки в серединах диапазонов плавной кривой, получим диаграмму V = f (t) (рис. 2.3).
Рис. 2.3 Диаграмма скорости точки В
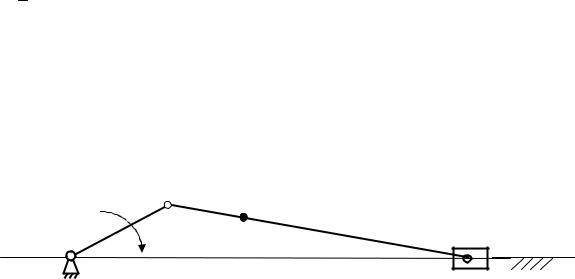
Имея диаграмму скорости, аналогично строим диаграмму ускорения, а=f(t) (рис. 2.4).
Масштаб t для всех графиков остается неизменным. Масштабы по осям ординат определяются по следующим формулам:
для диаграммы скоростей
|
v |
= |
|
s |
|
|
,; |
|
(2.4) |
|
|
|
|
|
|||||||
|
|
|
t |
Н1 |
|
|||||
для диаграммы ускорения |
|
|
|
|
|
|
|
|
|
|
|
|
a = |
|
v |
, |
(2.5) |
||||
|
|
|
|
|
|
|||||
|
|
|
|
t |
|
Н2 |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис 2.4 Диаграмма ускорения точки В
Из формул видно, что величины масштабов зависят от полосных расстояний Н1 и Н2.
Графоаналитический метод определения кинематических характеристик
Кинематическое исследование этим методом осуществляется в следующей последовательности:
1)производится структурный анализ заданного механизма;
2)вычерчивается механизм в положениях, для которых требуется построить планы скоростей и ускорений;
3)строятся планы скоростей и ускорений сначала для ведущих звеньев, а затем для всех групп Ассура.
Произведем кинематический анализ кривошипно-ползунного механизма в заданном положении (рис. 2.5). Известно, что кривошип ОА вращается с посто-
янной угловой скоростью ω (рад/с), а также даны основные размеры lОА; lАВ; l АS2 = 13 l АВ . Точка S2 является центром масс шатуна.
Произведя структурный анализ, установим, что механизм состоит из механизма первого класса, содержащего звенья 0; 1 и группы Асура II класса 2-го порядка, включающей звенья 2; 3. Число степеней подвижности механизма – единица (W=1).
|
|
А |
S2 |
|
ω |
|
|
|
|
2 |
|
О 1 |
|
|
|
|
|
В |
|
х |
|
|
х |
|
|
|
3 |
Рис. 2.5 Кинематическая схема кривошипно-ползунного механизма
Построение плана скоростей
Значение скорости точки А определяется по формуле
VA = ω lOA , , |
(2.6) |
для построения плана скоростей необходимо выбрать масштабный коэффициент
µ |
|
= |
vA |
, , |
(2.7) |
v |
|
||||
|
|
P |
|
||
|
|
|
|
||
|
|
|
a |
|
|
где Ра – длина отрезка, изображающего вектор скорости ϑА.
Для определения скорости точки В составим векторное уравнение. Точка В совершает сложное движение: она повторяет движение точки А и одновременно вокруг нее вращается.
ϑB = ϑA +ϑBA , |
(2.8) |
где ϑB - вектор скорости точки В; ϑA - вектор скорости точки А;
ϑBA - вектор скорости точки В в ее относительном движении вокруг точ-
ки А.
|
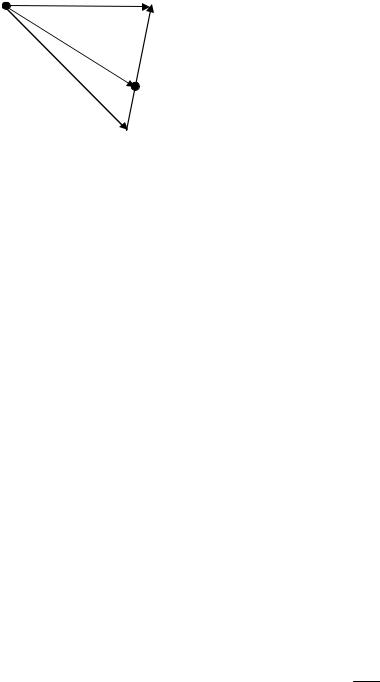
Это векторное уравнение решается графически (рис. 2.6). |
|||
Р |
r |
|
b |
Отрезок РА, изображающий скорость ϑA , |
ϑ B |
откладывается из полюса Р плана скоростей в |
|||
|
|
|
|
|
|
r |
|
|
направлении вращения кривошипа перпендику- |
|
ϑ |
S 2 |
ϑBA |
лярно ОА, из точки а проводится прямая, пер- |
|
|
пендикулярная шатуну АВ, а из точки Р прово- |
||
|
ϑ A |
|
S2 |
дится прямая, параллельная оси х-х. Обе прямые |
|
|
|
пересекаются в точке b. Отрезок Рb обозначает |
|
|
|
|
|
|
aϑB – вектор скорости точки В, а отрезок ва - ϑBA –
Рис. 2.6 План скоростей |
вектор скорости точки В в ее |
относительном |
||||||||||
|
|
движении вокруг точки А. |
|
|
|
|||||||
Скорость точки S2 центра масс шатуна АВ находится из подобия |
|
|
|
|||||||||
|
|
аS |
2 |
= |
|
lAS |
2 |
|
, отсюда |
|
|
|
|
|
ав |
|
lAB |
|
|
|
|||||
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
l AS |
|
|
ав , |
|
|
|
|
|
|
аS |
|
= |
2 |
|
|
|
|
|||
|
|
2 |
|
l AB |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|||
где |
l AS , l AB - реальные размеры механизма. |
|
|
|
||||||||
|
2 |
|
|
|
|
|
|
|
|
|
|
|
Отрезок aS2 плана скоростей определяет положения точки S2 |
вектора |
|
S2 на |
|||||||||
ϑ |
||||||||||||
отрезке ав. Соединив точку S2 с полюсом плана Р, получим отрезок РS2, изображающий в масштабе µv скорость ϑS2 точки S.
Для определения величин скоростей необходимо длины отрезков плана скоростей умножить на масштабный коэффициент µv
VB = Pв v ; VBA = вa µv ; |
VS2 = PS2 µv |
Построение плана ускорений
Величина ускорения точки А определяется по формуле
2
аА = аnAO = VA , (2.9)
l OA
Задаваясь длиной отрезка Па [мм], изображающего на плане ускорений вектор
r
аА определяем коэффициент плана ускорений µа
а = |
аА |
,. |
(2.10) |
|
Па |
||||
|
|
|
Ускорение точки В найдется из векторного уравнения
r |
r |
r |
τBA , |
(2.11) |
а |
В = аА + аBAn |
+ а |
r
где аВ - вектор ускорения точки В;
r
аА - вектор ускорения точки А;
аBAn ,аrBAr - векторы нормального и тангенциального ускорения точки В в ее относительном движении вокруг точки А.
Нормальное ускорение аBAn определяется:
|
|
|
аBAn |
= |
VBA2 |
|
, |
|
|
|
(2.12) |
||
|
|
|
|
l AB |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
||
Величина отрезка an2, изображающего вектор |
|
BAn , |
|
||||||||||
а |
|
||||||||||||
|
|
|
аn |
|
= |
аBAn |
, |
|
|
|
(2.13) |
||
|
|
|
2 |
а |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
||
Векторное уравнение (2.11) решается графически (рис. 2.7). |
|
||||||||||||
|
|
|
r |
|
|
|
|
|
|
Из полюса плана ускорений П откла- |
|||
b |
|
|
|
|
|
|
дываем вектор ускорения точки А (от- |
||||||
а В |
|
П |
|
резок Па) параллельно звену ОА, на- |
|||||||||
r |
|
|
|
||||||||||
|
|
|
|
|
|
|
правляя его от точки А к центру вра- |
||||||
аτBA |
r |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
щения О. Из точки а отрезка Па от- |
||||
n2 |
аА |
|
|
|
|
|
|
кладываем отрезок an2, параллельный |
|||||
|
|
BAn |
|
|
|
|
|
|
|
||||
|
а |
а |
|
|
|
|
|
|
шатуну АВ, в направлении от В к А. Из |
||||
Рис. 2.7 План ускорений |
|
|
|
|
|
|
точки n2 проводится прямая, перпен- |
||||||
|
|
|
|
|
|
дикулярная отрезку an2, а из полюса |
|||||||
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
плана ускорений |
П проводится пря- |
||
мая, параллельная оси х-х. |
|
|
|
|
|
|
|
|
r |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
- вектор ускорения |
|
Прямые пересекутся в точке в. Отрезок Пв обозначает аВ |
|||||||||||||
r
точки В, а отрезок n2в, перпендикулярный отрезку аn2, изображает аτBA - вектор тангенциального ускорения точки В в ее относительном движении вокруг точки
r
А. Соединив точки а и в, получим вектор аAВ .
Положение точки S2, центра масс шатуна АВ на отрезке ав находится из подобия
аS |
2 |
|
l AS |
|
|
|
l AS |
|
|
= |
2 |
, отсюда аS |
|
= |
2 |
ав . |
|
|
|
|
2 |
|
||||
ав |
l AB |
|
|
l AB |
||||
|
|
|
||||||
Соединив точку S2 с полюсом плана П, получим отрезок ПS2, изображающий вектор ускорения аS2.
Для определения величин ускорений точек механизма необходимо длины отрезков плана ускорений умножить на масштабный коэффициент а:
аВ = Пв а ; |
аS |
= ПS |
2 |
а ; и т.д. |
|
|
2 |
|
|

РАЗДЕЛ 3 КИНЕТОСТАТИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМОВ
Задача силового анализа механизма – определение сил, действующих на механизм.
Практически любой машинный агрегат можно представить в виде схемы:
Механизмы |
|
Передаточные |
|
Технологич. машины |
двигателя |
|
механизмы |
|
механизма |
|
|
|
|
|
На данной части машинного агрегата действуют:
1)движущие силы, которые стремятся ускорить движение механизма, совершающие полезную работу (в двигателе внутреннего сгорания (ДВС) сила давления газа на такте расширения).
2)силы полезного сопротивления – те, которые необходимо преодолеть для выполнения требуемого технологического процесса (в станках – сила резания, в автомобилях – сила сопротивления качения).
3)силы вредных сопротивлений, на которые затрачивается дополнительная работа сверх той, которая необходима для преодоления сил полезного сопротивления (силы трения в узлах машины).
Следует отметить некоторую условность в разделении сил на движущие и силы сопротивления. Например, при подъеме звеньев силы их тяжести являются силами сопротивления, а при опускании – движущими.
Среди сил, действующих на механизм, следует определить:
1)силы тяжести отдельных звеньев и машины в целом;
2)силы упругости – при деформировании звена под действием движущих сил происходит накопление энергии, при снятии нагрузки происходит переход потенциальной энергии деформируемого звена в кинетическую энергию, распрямляясь, звено движет соприкасающиеся звенья машин;
3)силы инерции, а также моменты от сил инерций. Силы инерции возникают при ускоренном (замедленном) движении звеньев.
Силой инерции называют геометрическую сумму сил противодействия движению звена.
Рассмотрим силы инерции в зависимости от характера движения звена: 1 Звено движется поступательно (рис 3.1 а)
|
|
|
(3.1) |
Pu = −m аs , |
|||
минус показывает, что Рu направлена противоположно аs.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а |
б |
в |
г |
|
|
|
|
|
|
|
|
|
|
|
д
Рис. 3.1 Частные случаи движения звеньев механизма
2 Звено неравномерно вращается вокруг оси, проходящей через центр тяжести ω≠const; Ри = 0 , так как аs=0 (рис. 3.1 б)
|
|
|
|
, |
(3.2) |
|
М |
||||||
|
= −Js ε |
|||||
где Мu - момент от пар сил инерции, H·м; Js – момент инерции звена, кг.м2;
ε - угловое ускорение, рад/с; 3 Звено равномерно вращается через ось, не проходящую через центр тя-
жести (рис. 3.1 в)
Ми = 0 ; Pu = −m аs ;
4 Звено равномерно вращается вокруг оси, проходящей через центр тяжести ω=const; Ми = 0 ; Ри = 0 , так как при ω=const ε=0 Мu=0; аs=0 Рu=0 (рис.
3.1 г);
5 Звено совершает сложное плоскопараллельное движение (рис. 3.1 д)
Pu = −m аs ;М = −Js ε .
Определение уравновешивающей силы методом построения планов сил
Всякий механизм, обладающий одной степенью подвижности и находящийся под действием заданной системы внешних сил, можно считать находящимся в равновесии, если к одному из его звеньев приложить уравновешивающее эту систему усилие. Уравновешивающим силовым фактором может быть либо некоторая условная уравновешивающая сила Ру, либо уравновешивающая
пара сил с моментом Му. Уравновешивающее усилие считают приложенным либо к звену, получающему энергию извне (технологические машины), либо к звену отдающему энергию (в двигателях). Звено к которому прикладывается уравновешивающее усилие, называется ведущим или начальным.
При определении Ру удобно все силы, действующие на механизм, заменить одной силой Рпр, приложенной к ведущему звену (кривошипу) в точке его присоединения к остальному механизму. Такая заменяющая сила представляет собой реакцию в кинематической паре со стороны групп Ассура на кривошип.
Для того чтобы система находилась в равновесии, такую заменяющую приведенную силу Рпр должна уравновешивать сила Ру. Уравновешивающей называется такая сила, работа которой на рассматриваемом перемещении по величине равна сумме работ всех сил, действующих на механизм. По направлению Ру и Рпр- противоположны.
Для определения приведенной силы необходимо узнать реакции в тех кинематических парах, где присоединяются группы Ассура к ведущему звену. Решение задачи о реакциях следует начинать с наиболее удаленной от ведущего звена группы. Затем переходить к следующей по направлению к ведущему звену. При расчете последующей группы, помимо действующих на нее сил надо учитывать и реакции со стороны ранее рассмотренной группы. Последним рассматривается механизм первого класса.
Последовательность силового анализа механизма:
1 Произвести структурный анализ механизма.
2 Произвести кинематический анализ.
3 Найти силы тяжести, силы инерции, момент от пар сил инерции, силу давления газов.
4 К наиболее удаленной от механизма первого класса группе Ассура приложить найденные силы и реакции.
5 Найти реакции с помощью многоугольника сил.
6 Выполнить действия по пунктам 4-5 для остальных групп Ассура.
7 Произвести анализ механизма первого класса, найти реакции, уравновешивающую силу и уравновешивающий момент.
При силовом анализе механизма используется принцип Даламбера: систему можно рассматривать без нарушения движения или покоя, если
при отсоединении от механизма, приложить к ней все силы, включая силы инерции и силы реакции в разрушенных шарнирах.
Произведем силовой анализ кривошипно-ползунного механизма пилы (см. рис. 2.5).
Произведя структурный анализ, установим, что механизм состоит из механизма первого класса, содержащего звенья 0; 1 и группы Ассура II класса 2-го порядка, включающей звенья 2; 3. Число степеней подвижности механизма – единица (W=1).
Строим план скоростей (см. рис. 2.6) и ускорений (см. рис. 2.7). Методика построения плана скоростей и ускорений подробно рассматривалась в предыдущем разделе.
Определение результирующих сил инерции
Сила инерции шатуна 2 определятся по формуле |
|
||||||||
|
|
|
и2 = −m2 |
|
|
|
, |
(3.5) |
|
|
Р |
aS 2 |
|||||||
Сила инерции поршня 3 определятся |
|
||||||||
|
|
|
и3 = −m3 |
|
B , |
(3.6) |
|||
|
|
P |
a |
||||||
Знак “-“ в формулах показывает, что направление векторов сил инерций и соответствующие им вектора ускорений противоположно направлены. Силу инерции кривошипа не определяем, т.к. он уравновешен и центр масс его находится на оси вращения О и не имеет ускорения.
Момент пар сил инерции шатуна 2 определятся по формуле
M |
и2 = − JS 2 |
ε |
2 , |
(3.7) |
где JS2 ; - момент инерции шатуна 2; ε2 ;- угловое ускорение шатуна 2.
Знак ″-″ в формуле показывает, что направление момента пары сил инерции и углового ускорения – противоположны.
Угловое ускорение определятся по формуле
ε2 = |
aτBA |
,. |
(3.8) |
|
|||
|
lAB |
|
|
Момент Mи2 удобно представить в виде пары сил Pми2 , приложенных в |
|||
точках А и В шатуна 2, перпендикулярно ему. Сила Pми2 |
прикладывается в со- |
||
ответствии с направлением момента. |
|
||
Величина силы |
|
||
Pми2 = Mи2 /lAB , |
(3.9) |
||
Момент пары сил инерции кривошипа равен нулю, поскольку вращение кривошипа равномерное и угловое ускорение отсутствует.
Определение сил тяжести звеньев
Массы шатуна 2 и поршня 3 определяются по формулам: |
|
G2 = m2 g, H; G3 = m3 g, H, |
(3.10) |
где g - ускорение свободного падения g = 9,8 м/с2.