

2598
.pdfкоторых можно записать алгоритмы формирования командных сигналов. На основании полученных алгоритмов формирования КС разрабатывают логическую сеть комбинационных и временных операторов, характеризующую алгоритмическую структуру блока формирования КС.
Принципиальную схему блока составляют путем замены комбинационных и временных операторов алгоритмической структуры функциональными компонентами, реализующими требуемые операции. При этом можно использовать типовые бесконтактные элементы или релейноконтактные схемы. Кроме основных функциональных компонентов применяют также вспомогательные элементы, необходимые для согласования по входам, усиления выходных сигналов или повышения устойчивости аппаратуры по отношению к импульсным помехам.
1.3.4. Автоматические системы контроля
Автоматические системы, выполняющие функции контроля, назы-
ваются автоматическими системами контроля (АСК) и являются одним из видов информационно-измерительных систем. Под контролем понимается процесс получения информации о состоянии объекта путем сравнения значений измеряемых параметров с допустимыми. АСК применяются в том случае, когда объект (агрегат, цех) имеет большое число точек контроля, определяющих ход процесса, или процесс очень быстротечен. В функцию АСК входят измерение большого числа параметров, сравнение их с допустимыми значениями (уставками), регистрация значений или отклонений от уставок, сигнализация о ненормальных режимах, выдача информации на устройство отображения, на ЭВМ или на автоматическую систему управления.
Все операции АСК производят по заданной программе, в исполнение которой может вмешаться оператор, нарушая обусловленную очередность и производя измерения в интересующих его точках.
Каждая автоматическая система контроля характеризуется техническими параметрами, к которым относятся: характер физических величин, подлежащих контролю; число контролируемых точек; точность измерения; быстродействие системы; расстояние объекта контроля от пульта оператора; вид регистрации измеряемых величин; параметры входного и выходного сигналов; стоимость.
АСК состоит из измерительных преобразователей (датчиков) и машины централизованного контроля (МЦК), получающей и обрабатывающей информацию от датчиков.
В МЦК можно выделить основные функциональные узлы, выполняющие следующие операции: нормализацию входного сигнала, т. е. преобразование его к виду, соответствующему параметру входного
590
сигнала МЦК; переключение входных и выходных сигналов; задание уставок в виде потенциалов или цифровых кодов; обнаружение отклонений путем сравнения полученных сигналов с уставками; аналогоцифровое преобразование сигналов; цифровую регистрацию; сигнализацию и отображение информации; выдачу информации на автоматические системы управления; некоторые математические операции над поступающей информацией.
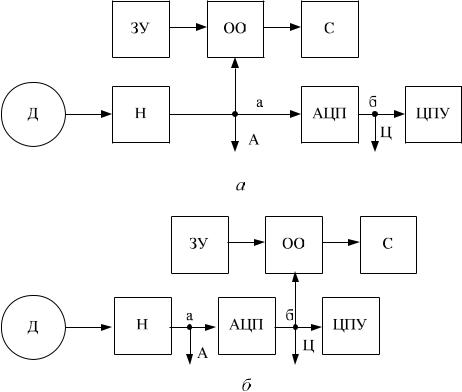
Сигнал от измерительного преобразователя Д (рис. 1.10), являющийся функцией измеряемой величины, проходит ряд устройств, в каждом из которых над ним производятся определенные операции. Так, в устройстве нормализации Н входной сигнал изменяется до значения, необходимого для работы МЦК, т. е. вводится определенный масштабный коэффициент. Кроме того, устройство нормализации может менять форму сигнала, например выпрямлять сигнал переменного тока, который может быть при использовании ряда датчиков.
В устройстве задания установок ЗУ имеется возможность получить два уровня напряжений для каждого канала, соответствующих границам допустимых значений измеряемой величины.
Рис. 1.10. Структурная схема одного канала МЦК: а – для сравнения аналоговым сигналом; б – для сравнения цифровым сигналом
Устройство обнаружения отклонений ОО сравнивает поступивший
591
сигнал с граничными уровнями и в случае выхода его за допустимые пределы, создает необходимое воздействие на последующие блоки (световой индикатор С).
Аналого-цифровой преобразователь (АЦП) преобразует аналоговый сигнал в код, который подается на цифропечатающее (ЦПУ) или вычислительное устройство.
Структурные схемы одного канала МЦК могут быть двух типов. Так, на схеме рис. 1.10, а аналоговый сигнал датчика через устройство нормализации подается на устройство обнаружения отклонений, где сравнивается с уровнями, подаваемыми из устройства задания уставок ЗУ. Этот же сигнал может быть преобразован с помощью АЦП и подан на
ЦПУ.
На рис. 1.10, б входной сигнал после нормирователя с помощью АЦП преобразуется в цифровой код, который в устройстве обнаружения отклонений сравнивается с уровнями блока уставок, подаваемыми в виде цифрового кода. Сигнал на автоматическое устройство управления может быть аналоговым (А), взятым от точки а, или цифровым (Ц) – от точки б.
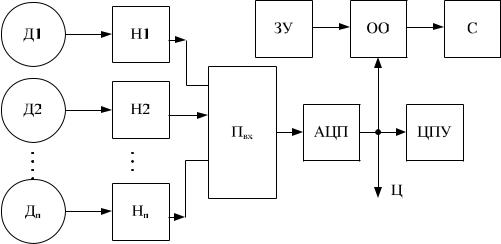
Рис. 1.11. Упрощенная структурная схема МЦК
При построении многоканальных МЦК необходимо иметь минимум использованной аппаратуры. Это достигается путем построения обегающих МЦК, в которых производится многократное использование некоторых функциональных устройств, а информация от датчиков поступает в порядке очереди. Обегающий контроль значительно экономит аппаратуру, но создает интервалы между очередными обращениями к одной и той же точке контроля.
Различное использование принципов обегания и цифрового преобразователя аналоговой информации приводит к ряду структурных схем
592
МЦК. Одна из наиболее простых схем показана на рис. 1.11. Она предназначена для обслуживания n датчиков. Сигналы от каждого датчика через нормирователи Н подаются на входной переключатель Пвх, соединяющий на определенное время датчик с устройствами ОО, АЦП, ЦПУ, ЗУ и С, которые за это время должны обслужить одну точку. Следовательно, быстродействие МЦК зависит от быстродействия отдельных блоков, особенно АЦП.
ЗУ  ОО
ОО  С
С
Д1
Д2
Пвх  Н
Н  АЦП
АЦП  ЦПУ
ЦПУ
Дn
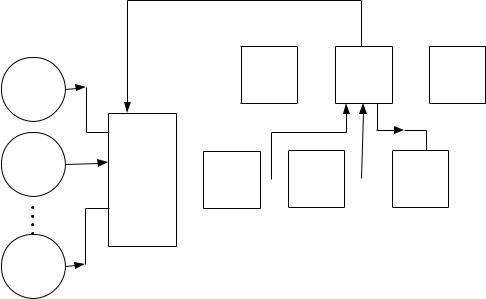
Рис. 1.12. Структурная схема МЦК с переменной скоростью входного переключателя
Чтобы увеличить быстродействие МЦК (рис. 1.12) при заданном быстродействии АЦП, можно идти двумя путями:
1)сравнение поступающего сигнала с заданными значениями вести в аналоговой форме, так как для этого необходимо меньше времени, чем для цикла работы АЦП;
2)выводить на печать не все значения контролируемых параметров,
атолько их отклонения за установленные пределы. Этим условиям отвечает схема, показанная на рис. 1.13. В ней Пвх останавливается на время, меньшее, чем требуется для АЦП, но достаточное для аналогового сравнения полного цикла входных сигналов с заданными уставками в устройстве ОО. Устройство же АЦП включается только при обнаружении недопустимых отклонений. При этом от ОО поступает команда на входной переключатель, который задерживается в таком положении на время, необходимое для цикла преобразования и печати.
В тех случаях, когда замедление в обнаружении отклонений недопустимо, может быть использована схема МЦК с двумя входными переключателями (см. рис. 1.13). Переключатель Пвх1 обслуживает часть
593
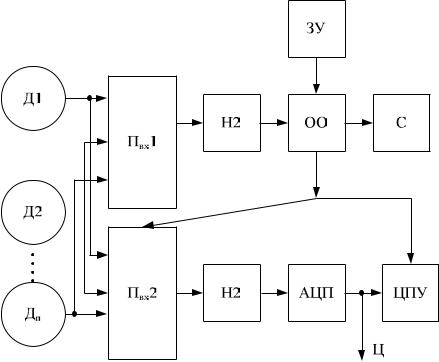
схемы, выполняющую сравнение и подачу сигнала при обнаружении отклонений, а другой Пвх2 предназначен для регистрации параметров. При такой структуре Пвх1 может производить обегание значительно быстрее, чем Пвх2, или же Пвх2 в обычном ритме не работает, а запускается только тогда, когда необходимо вводить цифровой код в ЦПУ или на схему автоматического управления.
Рис. 1.13. Структурная схема МЦК с двумя входными переключателями
Упрощенные структурные схемы МЦК не дают полного представления о всех устройствах, входящих в состав машины, поэтому на рис. 1.14 показана полная типовая структурная схема. Конечно, эта схема не исчерпывает всех возможностей, но является достаточно универсальной. В ней сигналы датчиков через нормирователи Н преобразуются к уровню входного параметра МЦК. Так как датчики могут быть различного типа, то и нормирователи должны им соответствовать.
Входной переключатель со скоростью, задаваемой блоком управления БУ, поочередно подает входные сигналы для последующей обработки. По команде БУ сигнал и уровни потенциалов поступают на блок
ОО.
В случае обнаружения отклонения от блока ОО сигнал подается на выходной переключатель Пвых, который переключается синхронно с Пвх. Следовательно, в любой момент времени к схеме подключен один из датчиков и соответствующий ему световой индикатор С, который будет работать только при наличии недопустимых отклонений. В этом случае
594
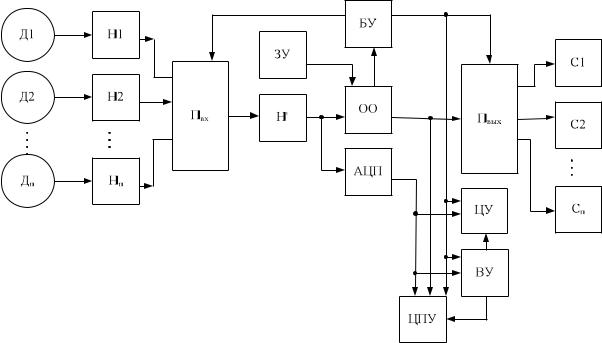
замедляется темп работ Пвх и Пвых и запускается ЦПУ, на которое подается цифровой код измеряемой величины от АЦП. В это же время включаются цифровое отсчетное устройство ЦУ и вычислительное устройство ВУ, если программа предусматривает какую-либо математическую обработку результатов измерений. Цифровые коды величин, подлежащих математической обработке, поступают в оперативную память вычислительного устройства, откуда по команде БУ могут быть выданы на
ЦУ или ЦПУ.
Рис. 1.14. Полная типовая структурная схема МЦК
1.3.5. Комплексные системы автоматизации зданий и сооружений
Выбор технических средств автоматизации при создании автоматических и автоматизированных систем управления зданиями и сооружениями должен основываться на современных средствах ГСП-2, которая в настоящее время получила мощное техническое развитие на микропроцессорной основе и обеспечила удобную среду обитания проживающих. Этому, в частности, способствует беспроводная система передачи информации.
Информационная, конструктивная и энергетическая напряженности устройств ГСП ускоряют проектирование и создание систем автоматического контроля, регулирование управления.
595
Дальнейшим развитием ГСП является создание в рамках агрегатированных комплексов, представляющих собой рациональные ряды функционально законченных блоков и устройств для построения информационных – измерительных, управляющих и испытательных систем. Каждый комплекс содержит обоснованный минимум элементов, обеспечивающих возможность построения разнообразных устройств автоматики методом агрегатирования и совместного использования элементов различных комплексов.
Агрегатные комплексы (АК) для построения АСУ ТП широко используют вычислительную технику. В таблице для АК приводятся некоторые агрегатные комплексы и данные их области применения.
Быстрое развитие с конца 80-х гг. ХХ в. микроэлектроники и микропроцессорных устройств, нашедшее применение во всех технических системах, изменило представление и содержание принципов и основ управления процессами производства. АСУ ТП стали носить характер распределенных (территориально и функционально) систем управления (РСУ), в качестве узловых станций в которых используются промышленные ПЭВМ или рабочие станции операторские терминалы, программируемые контроллеры, серверы и др., а датчики и исполнительные устройства становятся интеллектуальными устройствами, осуществляющими получение, обработку и преобразование информации в цифровой сигнал вместе их установками, что резко повысило функциональные возможности и компактность устройств. Большое влияние на средства передачи информации оказывают глобальные сети
Internet.
Развитие систем непосредственного цифрового управления процессами выдвигает требования надежности, точности и быстродействия, что вызывает необходимость резервирования высокоточных систем (дублирование, троирование аппаратных и программных средств), датчиков и преобразователи измеряемых параметров процесса, быстродействующие процессы и сопроцессы для обработки и передачи сигналов и т. д.
Появилась возможность интеграции АСУ ТП с автоматизированными системами управления предприятия АСУП, что, несомненно, будет способствовать повышению экономической эффективности РСУ.
Снижение цен на микропроцессоры наряду с расширением их технических характеристик, развитием элементов памяти и микроэлектроники в целом привело к созданию программируемых микропроцессорных контроллеров (ПМК) различного назначения, специализированных микро- и мини-ЭВМ, моноблочных и модульных контроллеров, интеллектуальных терминалов и рабочих станций.
Дальнейшей интеграции средств вычислительной техники для
596
совместного использования в структуре РСУ способствует выработка международных стандартов на протоколы передачи данных, способы кодирования информации, техническое и программное обеспечение систем управления и др. под руководством ISO (International Organization for Standardization – Международная организация по стандартизации, включающая более 70 национальных организаций по стандартизации).
Большое влияние на средства передачи информации оказывают глобальные сети Internet.
В последние годы наметилась интеграция АСУ ТП и АСУП на базе сервера БД РВ, являющегося ядром интегральной системы управления.
Сформированная архитектура РСУ включает уровни датчиков и исполнительных механизмов (уровень 0 или полевой уровень), устройства связи с объектом (1-й уровень), контроллеров (2-й уровень) и автоматизированных рабочих мест (АРМ) оператора (3-й уровень или диспетчерский уровень). В последние годы, однако, это архитектура претерпевает существенные изменения. Все большее число фирм (OSI Soft, Siemens, Iconics и ряд др.) поставляют на рынок промышленной автоматизации законченные решения по автоматизации технологических процессов и предприятий в целом, обеспечивая как горизонтальную, так и вертикальную интеграцию вычислительных ресурсов с использованием единой базы данных (сервера) для решения всего комплекса задач управления предприятием. Располагаясь в иерархической структуре РСУ между 3-м уровнем и уровнем АСУП (4-й административный или бизнесуровень), сервер единой базы данных трансформирует информацию с нижних уровней, в том числе от систем АСКУЭ – автоматизированной системы контроля и учета энергоресурсов, АСОДУ – автоматизированной системы оперативно-диспетчерского управления и др., передает ее в унифицированном виде на административный уровень. Таким образом, сервер единой базы данных становится ядром интегрированной системы управления предприятия в целом.
Выбор контроллеров для распределенной системы управления обусловлен большим числом разнородных факторов, зависящих прежде всего от того, является ли система вновь проектируемой или решаются задачи модернизации существующей системы [35].
597

Раздел 2
ТЕХНИЧЕСКИЕ СРЕДСТВА АВТОМАТИЗАЦИИ И СИСТЕМЫ УПРАВЛЕНИЯ ПРОИЗВОДСТВЕННЫМИ ПРОЦЕССАМИ. СОВРЕМЕННОЕ СОСТОЯНИЕ И ТЕНДЕНЦИИ РАЗВИТИЯ
2. СОСТОЯНИЕ ТЕХНИЧЕСКИХ СРЕДСТВ АВТОМАТИЗАЦИИ
2.1.Назначение и проблемы проектирования технических средств автоматизации
Технические средства (ТС) для автоматизации управления технологическими процессами выполняют следующиефункции:сбори преобразование информации (без изменения ее содержания) о состоянии процесса; передачу информации по каналам связи (перемещение в пространстве); преобразование, хранение и обработку информации, формирование команд управления (перемещение информации во времени с изменением ее содержания); использование и представление командной информации для воздействия на процесс и связис оператором АСУ ТП.
Все промышленные средства автоматизации технологических процессов в соответствиисГОСТ12997-84объединяютвперечисленныефункциональныегруппы,
образуемыепохарактерупреобразования информации в системах управления. В
свою очередь, средства функциональных групп дополнительно классифицируются по признаку отношения к системе и образуют: средства на входе системы (датчики); средства на выходе (выходные преобразователи, средства вывода информации и команд управления процессом); внутрисистемные технические средства (средства промежуточного преобразования информации, обеспечивающие взаимосвязь между устройствами с различными сигналами, различными «машинными языками», средства передачи, фиксации и обработки информации).
Кроме этих основных групп средств используются вспомогательные средства, такие как документационная техника, оборудование для рабочих мест операторов-технологов и диспетчеров и др.
Многообразие групп, типов и модификаций технических средств приводит к
598
многоальтернативнойпроблемепроектированиятехническогообеспеченияАСУТП
вкаждом конкретном случае. При определенных структуре и алгоритмах функционирования АСУ ТПможно предположить возможность оптимального
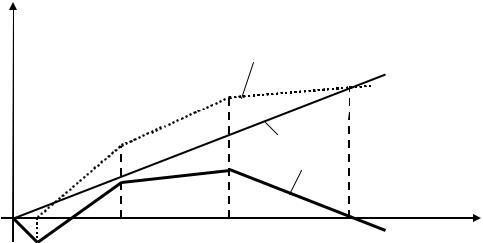
вкаком-либо смысле выбора комплекса технических средств для этой системы. Так, одним из наиболее важных критериев выбора КТС может служить их стоимость, занимающая в общей стоимости системы управления значительную часть. На рис. 2.1 показана зависимостьэкономичностиЭотобъема капитальных вложений К и «совершенства» С технических средств [5] в предположении о линейной зависимости С от К. Эффективность Эф(С) АСУ ТП имеет более сложный характер в зависимости от совершенства ТС и отражает: проявление эффективности после достижения определенного уровня совершенства С1; резкий рост эффективности на участке С1–С2, что соответствует так называемому эффекту «первого шага»; первый изгиб С2 и рост эффективности (участок С2–С3) за счет использования ТС, комплектно решающих более сложные задачи автоматизации; второй изгиб и значительное уменьшение роста эффективности АСУ ТП лишь за счет совершенства ТС, свидетельствующие об исчерпании возможностей принятой структуры, алгоритмов АСУ ТП или же самой технологии производства.
Экономичность Э ТС определим как разность: Э = Эф–С, где экономичность Э, эффективность Эф и «совершенство» С выражаются в одинаковых единицах, например в единицах стоимости. График Э(К) (см. рис. 2.1) свидетельствует о том, что при слишком малом и слишком большом объеме затрат К внедрение АСУ ТП может быть убыточным. Достижение максимальной эффективности Эф за счет совершенства выбранных средств С возможно при некотором разумном компромиссе между затратами на ТС и их совершенством.
С,Эф,Э
Эф(С)
С(К)
Э(К)
С2 |
С3 |
К, С |
С1 |
|
|
Рис. 2.1. Зависимость экономичности Э АСУ ТП от объёма капитальных вложений К и совершенства технических средств С
599