

2598
.pdfпротивопожарным требованиям и условиям техники безопасности. Выбор аппаратуры должен быть экономически обоснован.
После выбора всех элементов системы и определения их уравнений или передаточных функций составляется уравнение динамики автоматической системы управления, исследование которого позволяет определить ее устойчивость. Для исследования устойчивости линейных систем применяются критерии Рауса, Гурвица, Михайлова и Найквиста.
Из теории известно, что необходимым и достаточным условием устойчивости линейных автоматических систем является отрицательность вещественных частей корней ее характеристического уравнения. При наличии ЭВМ определение корней характеристического уравнения (с учетом их знаков) не представляет затруднений, поэтому отпадает необходимость в применении различных критериев устойчивости.
Для синтеза систем рекомендуются методы логарифмическочастотных характеристик и D-разбиения.
|
|
|
|
|
|
|
|
|
|
Таблица 1.5 |
Характеристики регуляторов непрерывного действия |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
Тип регулятора |
Закон |
Передаточная функция Wp (p) |
Параметр настройки |
|||||||
непрерывного |
регули- |
|
|
|
|
|
|
|
|
|
действия |
рования |
|
|
|
|
|
|
|
|
|
Статический |
П |
|
|
kp |
|
kp |
||||
|
|
|
|
|
|
|
|
|
|
|
Астатический |
И |
|
|
kp |
|
|
Tu |
|||
|
|
|
|
Tu p |
|
|
||||
Изодромный |
ПИ |
1 |
|
|
kp ,Tu |
|||||
|
|
kp (1 |
|
|
) |
|
|
|||
|
|
T p |
|
|
||||||
|
|
|
|
|
|
|
u |
|
|
|
Статический с |
ПД |
kp (1 TД p) |
|
kp ,TД |
||||||
первой производной |
|
|
|
|
|
|
|
|
|
|
Изодромный с |
ПИД |
1 |
|
|
|
|
|
kp ,Tu ,TД |
||
первой производной |
|
kp (1 |
|
TД |
p) |
|
||||
|
Tu p |
|
||||||||
Примечание. kp – коэффициент усиления регулятора; Ти – время изодрома; ТД – время предварения.
Качество процессов регулирования определяется по интегральным критериям или по кривым переходных процессов.
Нелинейные системы необходимо проверять на скользящий режим и при его наличии исследовать систему линейными методами. При отсутствии скользящего режима для исследования систем используются методы фазовой плоскости, гармонического баланса, графоаналитические методы Гольдфарба и Башкирова.
При исследовании систем импульсного регулирования используются
580
методы разностных уравнений, дискретного преобразования Лапласа и Z- преобразования.
В результате проведения аналитического или экспериментального исследования динамики процесса автоматического управления определяют, удовлетворяет ли система всем составленным для нее требованиям. В случае неудовлетворительной точности, надежности или устойчивости в структуру схемы автоматического управления вносятся требуемые изменения. Так, в случае неустойчивости системы включаются дополнительные последовательные или параллельные корректирующие звенья. Может быть изменена структура автоматической системы или применены другие методы управления. После внесения любых изменений структуры автоматические системы должны быть вновь исследованы на устойчивость и качество регулирования.
1.3.3. Автоматические системы управления объектами дискретного времени
Объекты дискретного действия выполняют ряд рабочих операций, которые циклически повторяются в определенной последовательности. При автоматическом управлении такими объектами управляющие устройства осуществляют заданную логическую последовательность включения и отключения исполнительных механизмов. Поэтому такие системы называют автоматическими системами логико-программного управления.
Синтез системы логико-программного управления выполняется по частям, для чего выделяются цепи воздействий на каждый исполнительный механизм. Функциональная структура таких цепей зависит от вида управления исполнительным механизмом, однако во всех случаях можно выделить блоки формирования командных (КС) и управляющих (УС) сигналов, а также блоки выходных коммутаторов (рис. 1.5, а). Входные и выходные сигналы каждого блока могут принимать только два значения (двоичные сигналы), условно соответствующие единице или нулю.
Командные сигналы задают интервалы времени работы исполнительного механизма в различных режимах. Управляющие сигналы определяют характер воздействий на исполнительный механизм: непрерывный, периодический или импульсный.
Выходные коммутаторы подключают обмотки исполнительного механизма к питающей цепи при воздействии управляющих сигналов. Например, в процессе автоматического управления требуется осуществлять непрерывные и периодические воздействия на электрический исполнительный механизм. В этом случае необходимо формировать два командных сигнала – КС1 и КС2, задающих интервалы времени работы в номинальном режиме и в режиме кратковременных
581
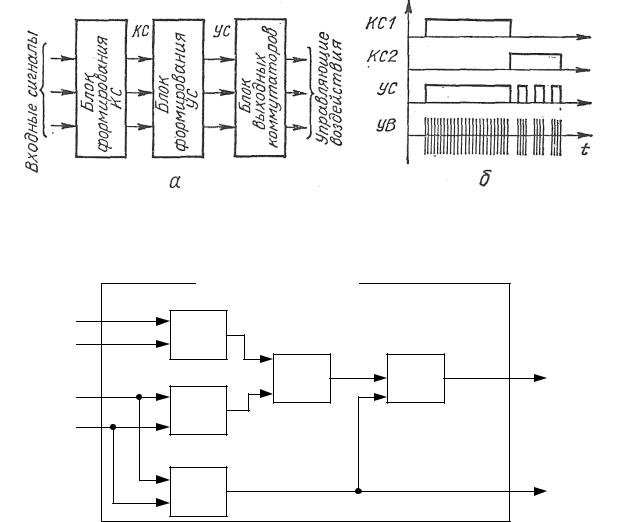
включений (рис. 1.5, б). Первый командный сигнал преобразуется в управляющий сигнал УС и воздействие УВ в результате усиления по мощности, второй – путем импульсной модуляции и усиления по мощности. При этом используют различные источники тока: для формирования командных и управляющих сигналов – источники постоянного тока, обеспечивающие стабильное напряжение до 24 В; для формирования управляющих воздействий – источники переменного тока с напряжением до 380 В. Поэтому низковольтные блоки формирования КС и УС не должны иметь гальванической связи с блоками выходных коммутаторов.
Рис. 1.5. Взаимодействие основных блоков системы логико-программного управления: |
||
а – структурная схема цепи воздействия на исполнительный механизм; б – временные |
||
|
диаграммы формирования сигналов и воздействий |
|
|
(n,m)-полюсник |
|
X1 |
L1 |
|
X2 |
y1 |
|
|
|
|
X3 |
W1 |
L3 |
L2 |
|
|
X4 |
|
|
|
|
|
|
W2 |
y2 |
|
|
|
Рис. 1.6. Алгоритмическая структура блока формирования двоичных сигналов |
||
Блок формирования командных или управляющих сигналов в общем случае представляет собой ориентировочный (n, m)-полюсник, который преобразует п последовательностей входных сигналов х1, х2, ..., хп в т последовательностей выходных сигналов y1, у2, ..., ут (рис. 1.6) [5]. Такой (п, m)-полюсник можно представить в виде логической сети, содержащей
582

комбинационные и временные операторы. Комбинационные операторы L1, L2, L3 отображают логическую связь между выходными и входными сигналами, которая записывается с помощью символов булевой алгебры (табл. 1.6). Временные операторы W1, W2 отображают зависимость между входными и выходными сигналами во времени.
|
|
|
|
|
|
|
|
|
Таблица 1.6 |
||||
|
|
|
Комбинационные операции и операторы |
|
|
|
|
|
|
|
|
||
Логическая связь |
Наименование |
Условное |
|
Графическое |
|||||||||
между сигналами |
комбинационных |
обозначение |
|
изображение |
|||||||||
|
|
|
операций |
комбинационных |
|
комбинационных |
|||||||
|
|
|
|
операций |
|
|
операторов |
||||||
v a b |
Дизъюнкция |
Dis (a, b) |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v a b |
Конъюнкция |
Con (a, b) |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v |
a |
|
Инверсия |
Inv (a, b) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Символическую запись, указывающую, в какой последовательности требуется выполнить комбинационные и временные операции с двоичными сигналами для преобразования входных сигналов в выходные, будем называть алгоритмом формирования командных или управляющих сигналов. Каждому алгоритму формирования выходного сигнала блока соответствует определенная логическая сеть комбинационных и временных операторов, представляющая алгоритмическую структуру блока. Основная задача синтеза систем логико-программного управления заключается в определении алгоритмической структуры блоков формирования командных и управляющих сигналов.
Вобъектах дискретного действия применяют нерегулируемые электрические исполнительные механизмы, которые работают в номинальном режиме или в двух режимах: номинальном и при пониженной скорости. Режим пониженной скорости используют для более точной отработки задания автоматической системой. При управлении электромагнитными клапанами и односкоростными электродвигателями такой режим осуществляется кратковременными включениями исполнительных механизмов.
Вобщем случае для управления исполнительными механизмами объектов дискретного действия требуется формировать командные
583
сигналы номинального режима работы А1, режима пониженной скорости А2, включения вперед В1 и включения назад В2. При этом управляющий сигнал U может быть непрерывным, периодическим или импульсным. На основании анализа функциональной структуры управления электрическими исполнительными механизмами, которые используются на предприятиях строительной индустрии (табл. 1.7), можно указать пять типовых формирователей непрерывных или периодических управляющих сигналов. Для формирования импульсных управляющих сигналов необходимо выделять начало или окончание непрерывных и периодических сигналов, как это показано на функциональной структуре управления электромагнитным клапаном с защелкой.
Алгоритмы формирования командных сигналов зависят от характеристики объекта и вида управления исполнительным механизмом. Для объектов дискретного действия основными видами управления являются шаговое, временное, блокированное, селекторное, стартстопное, цифровое и аналоговое.
При шаговом управлении формируется серия командных импульсов, число которых определяет угол поворота вала шагового исполнительного механизма.
При временном управлении исполнительный механизм М может включаться с задержкой относительно начала пускового сигнала Р или отключаться с задержкой после его окончания. Эти задержки могут быть реализованы совместно. Кроме того, исполнительный механизм может включаться на определенный интервал времени после начала пускового сигнала или его окончания. В первом случае алгоритм формирования командного сигнала включения исполнительного механизма зависит от соотношения длительности пускового τР и командного τм сигналов.
При блокированном управлении командные сигналы зависят от блокировочных связей между исполнительным механизмом и датчиками, переключателями и другими элементами системы, формирующими двоичные сигналы. Здесь используются датчики контроля давления, скорости, наличия и уровня материалов и т. п., имеющие релейную характеристику.
Блокировочная связь может быть разрешающей или запрещающей включение исполнительного механизма М при определенных условиях, альтернативной и комбинированной. При этом алгоритмы формирования командных сигналов включения механизма М определяются логической связью между сигналами разрешающей и инвертированными сигналами запрещающей блокировок.
584

Таблица 1.7
Функциональная структура управления электрическими исполнительными механизмами
Функциональная структура управления
Исполнительный механизм
Электромагнитный клапан
Электромагнитный клапан с защелкой
Нереверсивный
электродвигатель
трехфазный
Реверсивный
электродвигатель
трехфазный
Нереверсивный
электродвигатель
двухскоростной
Реверсивный
электродвигатель
двухскоростной
работа в номинальном |
работа в двух режимах |
|
режиме |
||
|
В режиме пониженной скорости вместо сигнала А1 подается сигнал А2
То же
Примечания: 1. Цифры 1 – 5 указывают тип формирования УС. 2. Imp – выделения окончания сигнала.
585
В качестве примера блокированного управления рассмотрим комплекс, содержащий три исполнительных механизма. Резервный исполнительный механизм МЗ включается, если не работает один из двух основных исполнительных механизмов. В этом случае осуществляется альтернативная блокировочная связь исполнительного механизма МЗ с элементами, характеризующими состояние (работает или не работает) основных исполнительных механизмов: M1 – сигнал v1 и М2 – сигнал v2. При наличии только одного из указанных блокировочных сигналов включается резервный исполнительный механизм МЗ.
При селекторном управлении командные сигналы включения исполнительного механизма М формируются по совпадению селектирующего сигнала с сигналами, определяющими переход управляемого объекта в заданное состояние. Для этого вида управления характерно несколько однотипных состояний управляемого объекта, каждое из которых может контролироваться одним или двумя путевыми датчиками. При управлении нереверсивным электродвигателем используется один датчик, сигнал которого si равен единице только в i-м состоянии управляемого объекта. При управлении реверсивным электродвигателем используются два датчика с механическим запоминанием срабатывания: в левой ориентации сигналы датчиков si и ri равны нулю, а в правой – единице. В этом случае i-е состояние определяется равенствами si = 1; ri = 0.
Выделяя интервал φi между левой и правой ориентациями обоих датчиков
i Int[(0 1)ri (1 0)si ],
можно обеспечить маятниковое движение в пределах зоны, ограниченной датчиками, при подаче пускового сигнала Р [5].
При стартстопном управлении начало командного сигнала определяется стартовым сигналом S, а окончание – сигналом остановки R. В этом случае алгоритм формирования командных сигналов в основном определяется временным соотношением между сигналами S и R. Если каждый такт временной диаграммы отличается от других комбинациями значений сигналов S и R, то формирования командных сигналов можно осуществлять комбинационными операторами. При других временных соотношениях между сигналами S и R формирование командных сигналов производится временными операторами выделения интервалов.
Цифровое и аналоговое управление осуществляется по рассогласованию между заданным и истинным значениями координаты, характеризующей состояние объекта.
При цифровом управлении возможны два основные варианта построения функциональной структуры [5]. В первом варианте (рис. 1.7, а)
586
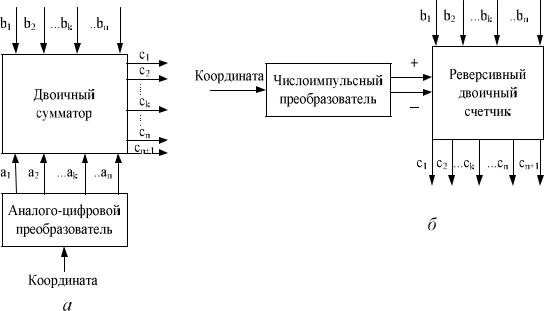
контроль координаты производится аналого-цифровым преобразователем, а рассогласование определяется двоичным сумматором, выполняющим алгебраическое сложение двоичных кодов задания b1 – b2 и координаты а1
– ап. Во втором варианте (рис. 1.7, б) контроль координаты производится число-импульсным преобразователем, а рассогласование определяется реверсивным двоичным счетчиком, выполняющим алгебраическое сложение двоичного кода задания и числоимпульсного (унитарного) кода координаты.
Рис. 1.7. Структурные схемы взаимодействия блоков при цифровом управлении: а – контроль координаты аналого-цифровым преобразователем; б – контроль
координаты числоимпульсным преобразователем
В процессе отработки задания значение координаты, характеризующей состояние объекта с двухскоростным исполнительным механизмом, может находиться в пределах зоны номинального режима, режима пониженной скорости, нечувствительности или выбега. Для формирования командных сигналов разряды с1, с2, ..., ск, ...,сп кода рассогласования делят на две группы, соответствующие зонам режима пониженной скорости (с1 – сk) и номинального режима (ck+t – сn). Кроме того, используется сигнал сп+1 разряда знака, характеризующий соотношение между кодами задания и координаты. Алгоритмы формирования командных сигналов составляют по значениям сигналов, характеризующих рассогласование в пределах зоны номинального режима и режима пониженной скорости.
При аналоговом управлении физической величиной-аналогом, моделирующим рассогласование, наиболее часто является электрическое напряжение или ток в нагрузке фазочувствительного усилителя. В этом случае контроль координаты осуществляют резисторными или
587
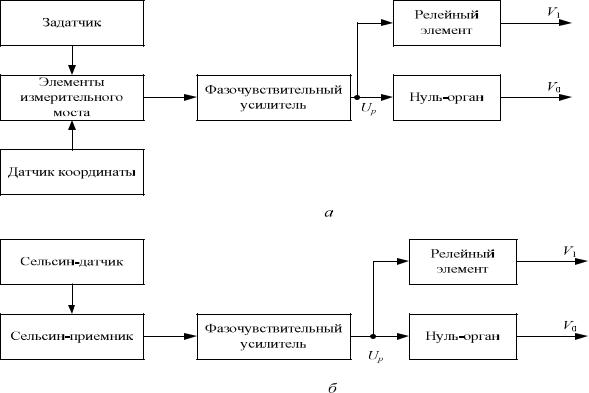
индуктивными датчиками, а задание требуемого значения координаты – задатчиком (рис. 1.8, а). Контроль и задание координаты можно осуществлять сельсином-приемником и сельсином-датчиком, соединенными по трансформаторной схеме (рис. 1.8, б). Командные сигналы номинального режима М1 и режима пониженной скорости М2 формируются по выходным двоичным сигналам V1 и V0 релейного элемента и нуль-органа:
M1=V1 |
(V1=1 при Up ≥Uc); |
||
|
|
V0 |
(V0=1 при Vp >0), |
M2=V1 |
|||
где Up – сигнал рассогласования на выходе фазочувствительного усилителя; Uc – порог срабатывания релейного элемента.
Рис. 1.8. Структурные схемы взаимодействия элементов при аналоговом управлении: а
– контроль координаты резисторными или индуктивными датчиками; б – контроль и задание координаты сельсинами
Цифровое и аналоговое управление применяют в тех случаях, когда значение координаты, характеризующей состояние объекта, необходимо контролировать с высокой точностью в широком диапазоне. Например, чтобы при селекторном управлении реверсивным двигателем получить такую же точность отработки задания, которую обеспечивает семиразрядная цифровая система управления, требуется установить 256 датчиков. Практически это нецелесообразно и бывает просто
588

неосуществимо из-за ограниченных габаритов технических устройств. Следует отметить, что цифровое управление позволяет получать
более точную отработку задания, чем аналоговое управление.
В заключение можно указать методику разработки блоков формирования командных сигналов (рис. 1.9).
Анализ управляемого объекта
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Цифровое |
|
|
|
|
|
Селекторное |
|
|
|
|
Блокированное |
|
|
|
|
|
|
Временное |
|
|||||||
|
управление |
|
|
|
|
|
управление |
|
|
|
|
управление |
|
|
|
|
|
|
управление |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Аналоговое |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Стартстопное |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
управление |
|
|
|
|
|
Изменение |
|
|
|
Выбор входных |
|
|
|
|
|
управление |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
состояния объекта |
|
|
|
сигналов |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Выбор входных |
|||
|
Алгоритмы |
|
|
|
|
Алгоритмы |
|
|
|
Определение |
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
сигналов |
|||||||||||||||
|
формирования КС |
|
|
|
|
формирования КС |
|
|
|
логических связей |
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Анализ временных |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Алгоритмы |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
диаграмм |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
формирования КС |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Алгоритмы |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
формирования КС |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
Алгоритмическая структура блока формирования КС |
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
Функциональные компоненты блока формирования КС |
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
Принципиальная схема блока формирования КС |
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 1.9. Последовательность разработки блоков формирования командных сигналов
В результате анализа управляемого объекта дискретного действия устанавливается вид автоматического управления каждым исполнительным механизмом. При цифровом и аналоговом управлении алгоритмы формирования КС однозначно определяются видами управления. При селекторном управлении алгоритмы формирования КС зависят от характера изменения состояния объекта. При блокированном управлении необходимо произвести выбор входных сигналов блока и определить логическую связь между ними, затем записать алгоритмы формирования КС. При временном и стартстопном управлении по выбранным входным сигналам блока строят временные диаграммы, в результате анализа
589