


5.3.3. Расчет на опрокидывание
При использовании технологического оборудования для демонтажа агрегатов существует вероятность его опрокидывания с грузом при приложении боковой силы. Наибольшая вероятность опрокидывания возможна в максимально поднятом состоянии рабочего стола тележки.
Алгоритмпрочностногорасчетана опрокидывание
Условие равновесия при опрокидывании:
kуст Mсопр 1.
Mопр
Момент сопротивления опрокидыванию зависит от плеча приложения момента сопротивления и силы, прижимающей тележку к полу:
Mсопр Fсопр Lсопр.
Сила сопротивления опрокидыванию задается массой агрегата и массой самой тележки:
Fсопр (mагр mтележки ) g.
Опрокидывающий момент зависит от боковой силы Fопр и высоты приложения силы h:
Mопр Fопр h.
Наиболее неблагоприятной ситуацией является ситуация, когда опрокидывающей силой является боковая сила, приложенная в центре тяжести груза. Максимальное значение опрокидывающей силы ограничено силой трения качения Fтр, возникающей на четырех колесных опорах с радиусом r.
F |
4 F |
4 k |
тр |
|
Fсопр |
. |
|
||||||
опр |
тр |
|
|
4r |
||
Пример
Для определения вероятности опрокидывания тележки с грузом производим расчеты для бокового усилия, приложенного к центру масс, при котором возможно опрокидывание тележки с грузом в максимально поднятом состоянии рабочего стола тележки на горизонтальном участке пола, рекомендованном для использования тележки
(рис. 15).
59
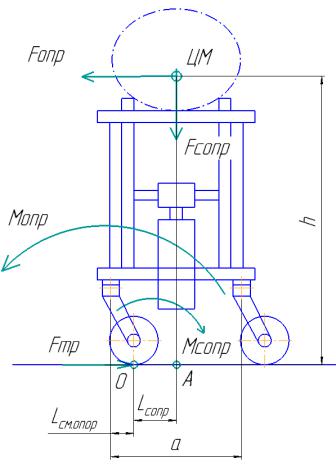
При расчете тележки на опрокидывание принимаем массу агрегата, равную максимально допустимой грузоподъемности тележки.
В максимально поднятом состоянии платформы с максимальной нагрузкой 700 кг и при массе тележки 100 кг исходными данными для расчета являются:
-высота центра тяжести груза h = 1,1 м;
-расстояние от оси действия прижимающей силы до линии, соединяющей точки опоры колес для наиболее неблагоприятного
случая смещения поворотных колес Lсопр = 0,164 м;
-радиус колеса опоры r = 0,05 м;
-коэффициент трения качения колеса с шиной по бетону kтр = =0,006.
Рис. 15. Расчетная схема на опрокидывание тележки
Производим расчеты согласно вышеприведенным формулам:
Fсопр (700 100) 9.8 7940Н;
60
|
Mсопр |
7840 0,164 1286 Н·м; |
|
|||||
|
F |
|
|
4 0,006 |
|
7840 |
940,8Н; |
|
|
|
|
|
|
||||
|
опр |
|
|
4 0,05 |
|
|||
|
|
|
|
|
|
|||
|
Mопр |
940,8 1,1 1034,9 1035 Н·м. |
|
|||||
Для |
оценки |
устойчивости |
конструкции |
определяем |
||||
коэффициент устойчивости:
kуст Mсопр 1;
Mопр
1286
kуст 1035 1,24 1.
Коэффициент устойчивости больше единицы, следовательно, устойчивость обеспечивается.
Для расчета максимально допустимого угла наклона пола γ, при котором тележка с поднятым грузом сохранит устойчивость, считаем максимально допустимым угол наклона пола, при котором направление вектора силы тяжести груза Fсопр (точка А) не выйдет за пределы ширины площадки, ограниченной опорами (точка О).
Из рассмотрения треугольника сил ЦМОА следует, что максимально допустимым расчетным углом наклона пола является угол γ:
tg Lсопр / h;
tg 0,164 /1,1 0,149 ;
arctg0,149 8,47о .
Для гарантированного сохранения устойчивости тележки принимаем максимально допустимым угол наклона пола, равный 5 .
5.3.4. Расчет элементов пневматической и гидравлических систем.
Общая структура пневматической и гидравлической систем
Пневматическая система машин-автоматов (рис. 16) состоит из исполнительных устройств, задатчиков закона движения, распределительных устройств, узла подготовки воздуха, датчиков состояния и управляющего устройства.
61
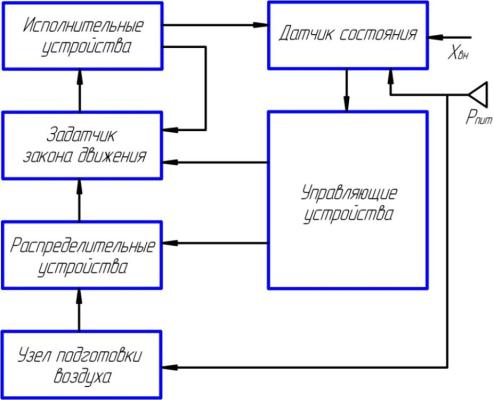
Исполнительным устройством (ИУ) называется устройство, служащее для перемещения рабочих органов машины (например, цилиндр, мембранное ИУ, двигатель вращательного движения и т. д.).
Задатчиком закона движения называется устройство, позволяющее осуществить перемещение рабочего органа при помощи исполнительного устройства в соответствии с заданной зависимостью пути от времени, т. е. с заданным законом движения (например, регулируемые дроссели, тормозные устройства).
Распределительным устройством называется устройство, предназначенное для изменения потоков воздуха, подаваемого из магистрали в рабочие полости.
Датчики состояния преобразуют какие-либо виды сигналов в пневматические и подают их в управляющее устройство.
Рис. 16. Структурная схема пневматической системы
Управляющее устройство, или система управления, осуществляет автоматическое (или полуавтоматическое) переключение распределителей в соответствии с заданными условиями работы, обеспечивая требуемую последовательность работы исполнительных уст-
62
ройств (заданную циклограмму). Система управления вырабатывает управляющие сигналы в соответствии с состоянием рабочих органов машины и в зависимости от состояния внешней среды.
Узел подготовки воздуха включает в себя ряд специальных устройств, в которых осуществляется удаление влаги, твердых частиц путем фильтрации.
Вкачестве исполнительных устройств в пневматических системах используются пневмодвигатели, которые предназначены для преобразования энергии сжатого воздуха в энергию движения выходного звена для приведения в движение рабочих органов машин.
По характеру движения выходного звена пневмодвигатели подразделяют на пневмоцилиндры (с поступательным движением выходного звена); поворотные пневмодвигатели (с ограниченным углом поворота выходного звена) и пневмомоторы (с неограниченным вращательным движением выходного звена). Наибольшее распространение получили пневмоцилиндры, в которых происходит преобразование потенциальной энергии сжатого воздуха в механическую энергию поршня.
Структурная схема гидравлической системы эквивалентна пневматической системе, за исключением узла подготовки воздуха. В гидравлической системе вместо узла подготовки воздуха устанавливается привод гидравлического исполнительного механизма (насос, двигатель), который приводится в движение от ДВС через различные устройства (ременную передачу, коробку отбора мощности, электродвигатель и др.).
Гидравлической машиной (гидромашиной) называется машина, предназначенная для преобразования механической энергии в энергию движущейся жидкости или наоборот. В зависимости от вида преобразования энергий гидромашины делятся на насосы и гидродвигатели.
Насос – это гидромашина для создания потока рабочей жидкости путем преобразования механической энергии в энергию движущейся жидкости.
Гидродвигатели служат для преобразования энергии потока рабочей жидкости в механическую энергию выходного звена гидромашины.
Вобъемном насосе жидкость перемещается вследствие вытеснения ее из рабочих камер вытеснителями.
63