

2158
.pdfМинистерство науки и высшего образования РФ Федеральное государственное бюджетное образовательное учреждение высшего образования
«Сибирский государственный автомобильно-дорожный университет (СибАДИ)»
СибАДИФИЗИЧЕСКОЕ МОДЕЛИРОВАНИЕ
Лабораторный практикум
Составитель С. . Игнатов
Омск • 2018

УДК 004.94:531.8 |
Согласно 436-ФЗ от 29.12.2010 |
«О защите детей |
от |
|||||
ББК 32.973:34.412 |
||||||||
информации, причиняющей |
|
вред |
их здоровью |
|
и |
|||
Ф50 |
|
развитию» данная продукция маркировке не подлежит. |
||||||
|
|
Рецензент |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
канд. техн. наук, доц. М.А. Гольчанский (СибАДИ) |
|
|
|
||||
СибАДИ |
||||||||
Работа утверждена редакционно-издательским советом СибАДИ в качестве |
|
|
||||||
лабораторного практ кума. |
|
|
|
|
|
|||
Ф50 Ф з ческое модел рование [Электронный ресурс] : |
лабораторный |
|
|
|||||
практикум / сост. С.Д. Игнатов. – Электрон. дан. – Омск : СибАДИ, 2018. – URL: |
|
|
||||||
http://bek.sibadi.org/cgi-bin/irbis64r plus/cgiirbis 64 ft.exe. - Режим доступа: для |
|
|
||||||
авторизованных пользователей. |
|
|
|
|
|
|||
Пр ведены спосо ы моделирования механических систем в SimMechanics, |
|
|
||||||
SimDriveline |
Stateflow. |
|
|
|
|
|
|
|
Имеет |
нтеракт вное оглавление в виде закладок. |
|
|
|
|
|
||
Предназначен для |
акалавров, о учающихся по направлениям «Наземные |
|
|
|||||
транспортно-технологические комплексы» и «Эксплуатация транспортнотехнологических машин и комплексов»; для специалистов, обучающихся по специальности «Наземные транспортно-технологические средства»; для магистров, обучающихся по направлениям « втоматизация технологических процессов и производств» и «Наземные транспортно-технологические комплексы»; для аспирантов, обучающихся по направлению «Машиностроение», изучающих дисциплины, связанные с моделированием различных физических процессов.
Подготовлен на кафедре «Техника для строительства и сервиса нефтегазовых комплексов инфраструктур».
Текстовое (символьное) издание (5,8 МБ)
Системные требования : Intel, 3,4 GHz ; 150 Мб ; Windows XP/Vista/7 ; 1 Гб свободного места на жестком диске ; программа для чтения pdf-файлов : Adobe Acrobat Reader ; Foxit Reader
Редактор Н.В.Павлова
Техническая подготовка Н.В. Кенжалинова Издание первое. Дата подписания к использованию 24.07.2018
Издательско-полиграфический комплекс СибАДИ. 644080, г. Омск, пр. Мира, 5 РИО ИПК СибАДИ. 644080, г. Омск, ул. 2-я Поселковая, 1
© ФГБОУ ВО «СибАДИ», 2018
Введение
Значительную часть исследований в настоящее время занимает моделирование объектов или процессов.
MatLab – это программный продукт, позволяющий решать зада- Счи сложных технических вычислений, формировать математические модели различных процессов и эффективно проводить их исследова-
ния.
Задачей курса «Физическое моделирование рабочих процес-
сов ДМ» является формирование у студентов навыков моделированияисследованразл чных ф з ческих процессов при проведении различного рода й.
В результате зучения курса студенты должны знать основные принц пы модел рования механических систем в программном про-
дукте MatLabбАрасш рен и Simulink.
Д И
3
Лабораторная работа №1
Моделирование передаточных механизмов и сцепления при помощи пакета SimDriveline
Механическая передача
СибАДИявляющиеся источником нагрузки на двигатель. Трансмиссия состоит из тел, вращающихся вокруг фиксированной оси в соответствии с законами Ньютона [1, 3].
Механическая передача – механизм, служащий для передачи и преобразования механической энергии от энергетической машины до исполн тельного механизма (одного или более) с изменением характера дв жен я ( зменения направления, сил, моментов и скоростей).
Как прав ло, |
спользуется передача вращательного движения [1, 3]. |
||
В общем случае трансмиссия предназначена для передачи кру- |
|||
тящего момента от дв гателя к колёсам (рабочему органу), изменения |
|||
тяговых ус л й, скоростей |
направления движения. Трансмиссия |
||
привод т в дв жен е машину путем превращения крутящего момента |
|||
двигателя |
вращательной энергии в кинетическую энергию транс- |
||
портного средства |
поступательного движения. Машина движется в |
||
определенной среде, |
со стороны которой возникают силы реакции, |
||
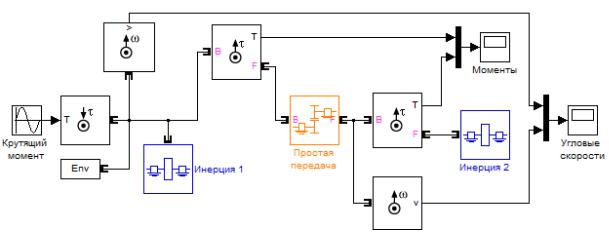
Рис. 1. Структурная схема простого передаточного механизма
вобозначениях SimDriveline
Спомощью программного обеспечения SimDriveline можно моделировать трансмиссию, объединять ее блок-схему с другими моделями Simulink. Вы можете инициировать и поддерживать вращательное движение в трансмиссии с приводом во время измерения с помо-
4
щью датчиков движения элементов трансмиссии и моментов, действующих на них [1].
труктурная схема, изображенная на рис. 1, представляет собой модель простого передаточного механизма. Эта модель демонстриру-
ет сцепление двух валов зубчатой передачей внутреннего зацепления. |
|||||||||||||||||
С |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Простой передаточный механизм накладывает одно ограниче- |
|||||||||||||||||
ние, заданное фиксированным передаточным отношением gFB, на |
|||||||||||||||||
движен я |
моменты двух осей [1, 3]: |
|
|
|
|
|
|
|
|
|
|||||||
Если |
|
|
B |
|
|
|
B |
|
(1) |
||||||||
|
|
gFB |
|
|
|
|
|
|
, |
||||||||
|
|
|
|
|
|
F |
|
|
|
F |
|
||||||
где ωB, ωF– угловые скорости вращения осей B и F; τB, τF – крутящие |
|||||||||||||||||
|
зубчатых |
|
|
|
|
|
|
||||||||||
моменты осей B F. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
простой передаточный механизм представляет собой два |
||||||||||||||||
связанных |
колеса, то передаточное отношение связано с от- |
||||||||||||||||
ношен ем рад усов r |
чатых колес и отношение числа N зубьев на |
||||||||||||||||
каждой шестерне [1, 3] следующим образом: |
|
||||||||||||||||
|
А |
|
|||||||||||||||
|
|
gFB |
rB |
|
|
NB |
|
, |
(2) |
||||||||
|
|
r |
|
|
N |
F |
|
||||||||||
|
|
|
|
|
F |
|
|
|
|
|
|
|
|
|
|||
|
|
|
Д |
|
|||||||||||||
где rB, rF – радиусы шестерней B и |
F; NB, |
|
NF – число зубьев шестерней |
||||||||||||||
B и F.
Порядок моделирования
1.Перед моделированием простого сцепления необходимо выполнить настройку блоков. Для блока «Крутящий момент» амплитуда и частота равны 1. Для блока «Трансмиссия окружающей среды» необходимо задать допустимую скорость сцепления, равную 1e-3 рад/с.
В блоках «Инерция 1» и «Инерция 2» задать значение момента инер- |
||
ции 1 кг·м2. В блоке «Простая передача» установить передаточное |
||
число, равное 2. |
И |
|
2. |
При помощи виртуального осциллографа снять графики изме- |
|
нения моментов и угловых скоростей. |
|
|
3. |
В блоке «Инерция 2» задать |
значение момента инерции, |
4 кг·м2. |
|
|
4. |
Выполнить п. 2. |
|
5
5. |
В блоке «Простая передача» задать значение передаточного |
числа, равное 3. |
|
6. |
Выполнить п. 2. |
7. |
В блоке «Инерция 1» задать значение момента инерции, рав- |
ное 10 кг·м2. |
|
С |
|
8. |
Выполнить п. 2. |
9. |
Провести анализ полученных графиков зависимостей и сде- |
лать вывод, на что вл яют такие параметры, как момент инерции и передаточное ч сло.
дискахСцепление
цеплен е служ т для кратковременного разъединения двигателя от трансм сс плавного их соединения при трогании с места, также при переключении передач. Сцепление состоит из привода и
-По бАрежиму включения – постоянно замкнутые и непостоянно замкнутые.
-По виду трения – на сухие и работающие в масле (мокрые).
-По числу ведомых дисковД– одно- , двух- и многодисковые.
-По типу и расположению нажимных пружин – с расположением пружин по периферии нажимного диска и с центральной диафрагменной пружиной.
-По способу управления – с механическим, гидравлическим, электрическим или комбинированным приводомИ(например, гидромеханическим).
Кинетический момент трения зависит от условий [1, 3]:
K nфр rэф, |
(4) |
где τK – кинетический момент трения; nфр – число трущихся поверхностей; rэф – эффективный радиус крутящего момента; PNF – пиковая нормальная сила;Pфр – мощность фрикциона.
6
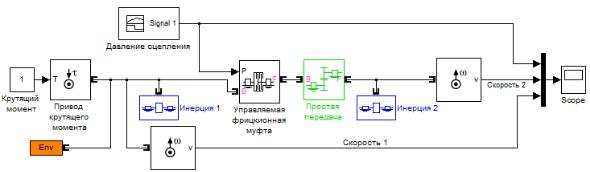
Структурная схема, изображенная на рис. 2, представляет собой модель простого сцепления [1].
Рис. 2. труктурная схема простого сцепления в обозначениях SimDriveline |
|
С |
|
Эта модель |
два блока инерции, соединенные |
простой передачей, которой управляет фрикционная муфта. Первона- |
|
демонстрирует ственно нулеваяблокскорость. К локу «Инерция 1» приведен постоян-
чально давлен е сцепления нулевое, а у блока «Инерция 2» соответ-
ный крутящ й момент. Как только давление сцепления увеличивается, на блок «Инерц яА2» подается угловое перемещение. При снижении давления сцепления на муфте прекращается подача крутящего момента на «Простая передача». Поскольку нет потерь на трение, ось F фрикционной муфты продолжает вращаться [1].
Порядок моделированияД
1.Перед моделированием простого сцепления необходимо выполнить настройку блоков. Для блока «Трансмиссия окружающей среды» необходимо задать допустимую скорость сцепления, равную 1e-3 рад/с. В блоке «Давление сцепления» задать координаты точек графика давления: (0;0), (2;0), (4;0,9), (6;0,9), (7;0), (10;0). В блоках
«Инерция 1» и «Инерция 2» задать значение момента инерции 2 кг·м2. В блоке «Управляемая фрикционная муфта» установить зна-
чения: число трущихся поверхностей – 1; эффективный радиус мо- |
|
мента – 0,04 м; пиковая нормальная сила – 500 Н; статический фактор |
|
пика трения – 1,1. |
И |
|
|
2.При помощи виртуального осциллографа снять графики изменения скорости 1, скорости 2 и давления сцепления.
3.В блоке «Инерция 2» задать значение момента инерции, равное 20 кг·м2.
4.Выполнить п. 2.
7
5. |
В блоке «Управляемая фрикционная муфта» установить зна- |
||
чение числа трущихся поверхностей, равное 5. |
|||
6. |
Выполнить п. 2. |
|
|
7. |
В блоке «Управляемая фрикционная муфта» установить зна- |
||
чение пиковой нормальной силы 2500 Н. |
|||
С |
|
||
8. |
Выполнить п. 2. |
|
|
9. |
Провести анализ полученных графиков зависимостей и сде- |
||
лать вывод, на что вл яют такие параметры, как момент инерции, |
|||
число трущ хся поверхностей и значение пиковой силы трения. |
|||
ки |
|||
|
|
|
Содержание отчета |
1. |
Цель работы. |
|
|
2. |
труктурная схема передаточного механизма в обозначениях |
||
SimDriveline. |
|
|
|
3. Граф |
зав с мостейизменениямоментовиугловых скоростей. |
||
4. |
Выводы о вл янии параметров блоков модели. |
||
5.Структурная схема простого сцепления в обозначениях
SimDriveline.
6.Графики зависимостей изменения скорости 1, скорости 2 и давления сцепления.
7.Выводы о влиянии параметров блоков модели.бА
|
|
Д |
||
|
Контрольные вопросы |
|||
1. |
Назначение программного обеспечения SimDriveline. |
|||
2. |
Библиотеки SimDriveline. |
И |
||
3. |
Блоки SimDriveline. |
|
||
4. |
Понятие «Механическая передача». |
|||
|
||||
5. |
Понятие «Сцепление». |
|
|
|
6. |
Классификации муфт сцепления. |
|
||
8
|
Лабораторная работа №2 |
|||
|
Моделирование работы алгоритма Евклида |
|||
|
при помощи пакета Stateflow |
|||
|
Модель работы алгоритма Евклида |
|||
|
В работе необходимо создать модель, реализующую алгоритм |
|||
Евклида по нахожден ю наибольшего общего делителя двух нату- |
||||
ральных ч сел. Этот ставший классическим пример разветвляющего- |
||||
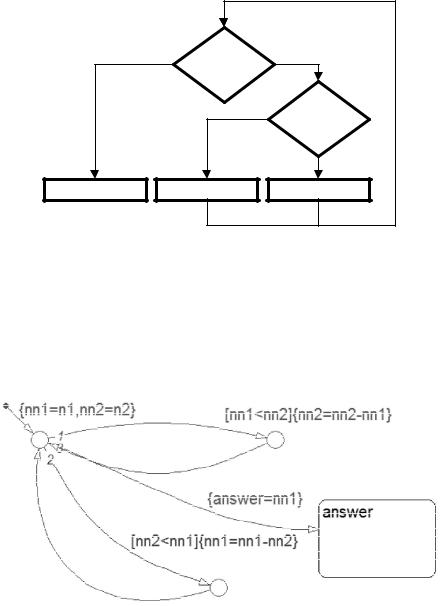
ся алгор тма можно представить в виде блок-схемы, изображенной |
||||
на |
. 3 [1, 6]. |
|
|
|
С |
|
|
|
|
|
ДА |
|
n1=n2 |
НЕТ |
рис |
|
|
||
|
|
|
||
|
|
|
НЕТ |
n1>n2 |
|
б |
|||
|
n1=n1-n2 |
|||
|
Answer=n1 |
n2=n2-n1 |
||
|
Рис. 3. |
|
лгоритм Евклида |
|
|
ДА |
|||
|
Stateflow-моделью работы этого алгоритма может служить диа- |
|||
грамма, представленная на рис. 3. |
того, чтобы создать модель при |
|||
использовании Stateflow, необходимо выполнить Start / Simulink / |
||||
Stateflow / NewChart. В появившемся окне открываем блок Chart и |
||||
строим Stateflow-модель, представленную на рис. 4 [1, 6]. |
||||
|
|
Для |
||
|
|
|
|
И |
|
Рис. 4. Stateflow–модель алгоритма Евклида |
|||
9

Необходимо выполнить настройку входных и выходных сигналов блока Chart. Это можно выполнить, открыв окно настройки модели (Explore). Необходимо добавить данные, которыми будет оперировать модель, для этого на рабочей панели окна Explore нажимаем AddData. Для реализации рассматриваемого алгоритма нужны два
Свхода (n1 и n2), две переменные (nn1 и nn2) и один выход (answer). Вид данных (Scope) задается соответственно рис. 5 [1, 6].
и
бАРис. 5. Окно настроек Stateflow-модели
Таким образом, получаем лок Chart с двумя входными и одним выходным параметрами. В качествеДисточников сигнала используем блоки Constant, а выходной сигнал подадим на блок Display.
Конечный результат работы модели на заданном ей наборе данных показан на рис. 6. Наибольшим общим делителем заданных на
входе в диаграмму чисел 165 и 66 является число 33 [1, 6]. И
Рис. 6. Структурная схема модели алгоритма Евклида
10