

2158
.pdf2) On – включен. В этом состоянии включается бойлер. Возврат в состояние Off может происходить двумя путями: через 20 с или раньше, если заданная температура не достигнута.
Функция при mode=ON делает цвет индикатора color=GREEN и color=RED в противном случае. Затем она присваивается
LED=COLOR. |
|
|
С |
|
|
Р с. 17. Stateflow-диаграмма функции flash LED() (слева) и |
||
|
Stateflow-диаграмма функции b=cold() (справа) |
|
и |
|
|
При LED=OFF возвращается значение LED=COLOR (цвет |
||
включаемого |
нд катора) и LED=OFF в противном случае. |
|
Stateflow |
– диаграмму лока Controller необходимо настроить |
|
согласно рис.18. |
|
|
бА |
||
|
Д |
|
Рис. 18. Настройка Stateflow-диаграммы блока Controller |
||
Блок BoilerPlantModel имитирует работу нагревателя бойлера. |
||
Структура блока представлена на рис. 19. |
И |
|
|
|
|
Рис. 19. Simulink-модель работы нагревателя
21

Модель нагревателя содержит блок DataTypeConversion, в настройках которого необходимо установить Output datatype: boolean, Integer rounding mode: Zero и выбрать Saturateon integer overflow.
В состав модели нагревателя входит также подсистема digital thermometer, модель которой представлена на рис. 20.
моделирует |
|
|
|
Р с. 20. Подсистема digital thermometer |
|
||
СЭта подс стема |
|
цифровой термометр, состоящий из |
|
простых термопар АЦП. Передаточная функция датчика |
|
||
бА |
(10) |
||
|
W(p) 0,05p 0,75. |
||
|
Д |
|
|
|
|
И |
|
Рис. 21. Настройки блока Data Type Conversion |
|
||
В подсистеме используются блоки Polynomial (sensor), в настройках которого необходимо задать значения [0,05;0,75], а также блок DataTypeConversion (Linear fixed point conversion) (рис. 21).
Подсистема ADC представляет собой 8-битный АЦП, имеющий входной диапазон 0,5 В. Модель подсистемы ADC представлена на рис. 22 [1, 6].
22

Рис. 22. Подсистема ADC
СВ настройках блока Quantizer необходимо задать интервал, равный 1. В настройках блока Saturation верхний предел – 255, нижний предел – 0. Задать время моделирования 1400 с.
В результате моделирования графики, отображающие цвет ин-
дикац, состоян е бойлера (вкл/выкл) и температуру воды, должны соответствовать р с. 23 [1, 6].
бА Д
Рис. 23. Результаты моделирования работыИбойлера
Порядок моделирования
1.Составить структурную схему модели, соответствующую варианту задания.
2.При помощи матрицы перехода перейти к новым координатам состояния и составить новую структурную схему системы.
23
3. Собрать две структурные схемы моделей на компьютере, используя блоки Subsystemприложения Simulink. Подать одновременно на вход обеих подсистем единичное ступенчатое воздействие, используя блок Step, и сравнить результаты моделирования.
4. хема моделирования в приложении Simulink представлена на Срис. 14. Для моделирования выбрать метод симуляции с фиксирован-
ным шагом (Simulation → Configuration Parameters → Fixed-step), рав-
ным 0,01 с, время моделирования в лабораторной работе принять не более 3 с.
систему1. Цель ра оты. Содержание отчета
1)КакимибАспосо ами можно описать динамическую систему?
2)Как выполнить переход от одного способа описания к другому?
3)Что понимается под Дмультипликативной и аддитивной моделями? Какие еще модели вы знаете?
4)Что такое внешняя и внутренняя модели системы?
5)Как перейти от внешней модели к внутренней, и наоборот?
6)Каковы определения управляемости и наблюдаемости системы? И
7)Что такое невырожденное преобразование?
8)Изменится ли передаточная функция системы с заменой координат состояния?
9)Как построить структурную схему по матрицам модели?
10)Что понимают под структурным представлением Коши?систему,исходнуюописывающих2. стема уравнений,
24

Лабораторная работа №5
Моделирование движения маятника при помощи пакета SimMechanics
Для создания модели механической системы необходимо вывести уравнения движения и составить Simulink-модель из стандартных блоков Simulink.
Рассмотр м пр мер составления модели маятника. Составим
расчетную схему (р с. 24) уравнения движения маятника [1, 2, 4, 5]. |
||||
СF mg sinθ ma; |
|
(11) |
||
a g sinθ; |
|
(12) |
||
бА |
|
|||
и |
v |
|
|
|
lθ; |
|
(13) |
||
|
a |
|
|
(14) |
|
lθ; |
|
||
lθ g sinθ; |
|
(15) |
||
|
|
g |
|
(16) |
θ |
sinθ. |
|
||
|
Д |
|
||
|
|
l |
И |
|
|
|
l |
||
|
|
|
|
|
|
|
θ |
|
|
|
|
F |
mg |
|
|
|
|
|
|
Рис. 24. Расчетная схема маятника |
|
|||
Составим Simulink-модель, символизирующую собой графическое представление математических операций (рис. 25) [1, 2, 4, 5].
25

|
Рис. 25. Simulink-модель маятника |
|
||
Перед модел рованием необходимо задать начальное состояние |
||||
подвижное |
|
|
|
|
в настройках блока |
нтегрирования угловой скорости . |
|||
СПерейдем к |
|
|
SimMechanics модели: |
|
построению аналогичной |
|
θ̇ |
||
блок Revolute будет моделировать вращательный шарнир; Body – |
||||
звено; Ground – неподвижное звено (рис. 26). |
||||
бА |
|
|||
|
|
Д |
||
|
|
И |
||
Рис. 26. Представление механической системы маятника вSimMechanics
Перенесем блоки в окно модели и соединим их вместе. Для измерения угла αp и угловой скорости αv на вращательном шарнире под-
ключим к нему датчик JointSensor (рис. 27) [1, 2, 4, 5].
26
С Р с. 27. SimMechanics-модель маятника
Р с. 27. SimMechanics-модель маятника
Любой механ |
зм можно представить в виде совокупности |
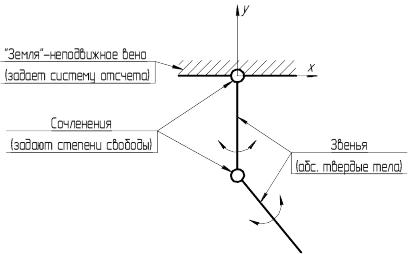
звеньев сопряжен |
й. Например, двухзвенный физический маятник |
(рис. 28) представляет со ой последовательное соединение следую- |
|
щих элементов:
неподвижного звена (земли);шарнирного сочленения (задающего 1-му звену одну степень
свободы: поворот вокруг оси z);
первого звена (звено представляется как абсолютное твердое тело);
шарнирного сочленения между 1-м и 2-м звеньями (ограничи- |
|
бА |
|
вает степени свободы 2-го звена, оставляя также только поворот в |
|
плоскости xy); |
Д |
второго звена. |
|
|
|
|
И |
Рис 28. Модель двухзвенного физического маятника
27

SimMechanics-модель такого механизма строится в аналогичной последовательности (рис. 29).
Исходным элементом модели является звено Ground – земля. К нему присоединен элемент Revolute (т.е. сопряжение, позволяющее следующему звену лишь поворачиваться вокруг указанной оси z). Далее следует непосредственно звено физического маятника Body. В качестве параметров этого звена необходимо указать массу тела, моменты нерц относ тельно главных центральных осей симметрии,
а также коорд наты верхнего, нижнего концов звена и его центра |
|
масс. При этом коорд наты можно задавать как в глобальной системе |
|
С |
в локальной системе координат (ЛСК) звена. |
коорд нат (ГСК), так |
|
Аналог чно к первому звену посредством шарнирного соедине- |
|
Revolute 1 пр соед |
няется второе звено Body 1. |
Чтобы звенья спроектированного механизма начали движение, |
|
ния |
|
необход мо л |
до авить вынуждающую силу, либо задать началь- |
ные услов я (напр мер, начальное отклонение или сообщить началь- |
|
бо |
|
|
А |
ную скорость). Для реализации последних используется блок |
|
InitialCondition [1, 2, 4, 5]. |
|
|
Д |
|
И |
а б
Рис. 29. SimMechanics-модель двухзвенного физического маятника (а) и модель имитации движения (б)
28
На модели имитации отображаются звенья, колеблющиеся по законам классической механики (физики твердого тела). Там же отображаются локальные системы координат (ЛСК) звеньев.
Вопрос о выборе той или иной системы координат (СК) является очень важным. Правильный выбор СК значительно облегчает моделирование механизма и интерпретацию результатов.
При моделировании данного механизма использовались сле-
дующ е К (р с. 30) [1].
Неподв жная глобальная система координат ГСК Global нахо- |
|
дится в точке сопряжен я неподвижного звена с верхним звеном (ко- |
|
леном маятн ка). Задавать координаты точек верхнего звена маятника |
|
С |
спосо ами, в том числе, просто перечислив их |
можно разл |
|
значенчнымия в ГСК. Однако это не всегда удобно. ВерхнбАй конец первого звена сопрягается с неподвижным зве-
ном, поэтому его коорд наты совпадают с началом ГСК. Его координаты действ тельно легко задать как Global [0; 0; 0]. Пусть звено име-
ет дл ну L с мметрию относительно главной центральной оси инерц (ГЦОИ). Положение центра масс (ЦМ) звена удобно задавать уже не в ГСК, а в только что созданной ЛСК, где началом координат является верхний конец звена, т.е. в ЛСК CS1. Тогда координаты ЦМ можно задать как CS1 [0; -L/2; 0]. налогично нижний конец звена можно задать в ЛСК CS1 [0; -L; 0] [1].
Несмотря на то, что начало ЛСК CS1 совпадает с началом ГСК Global, следует иметь в виду, что ЛСК CS1 принадлежит верхнему
звену, а значит, |
может поворачиваться относительно точки |
Global [0; 0; 0]. Глобальная же система координат ГСК Global всегда |
|
неподвижна. Ее начало может и не совпадать с точкой сопряжения |
|
|
И |
неподвижного звена (тем более, когда неподвижных звеньев в меха- |
|
низме несколько). |
Д |
Помимо визуального наблюдения за свободными (при задании |
|
начальных условиях) или вынужденными колебаниями (при наложе- |
|
нии внешней силы) |
можно анализировать законы движения любой |
точки механизма. Для этого необходимо при задании координат звеньев указать координаты интересующей точки и к выходу соответствующего Simulink-блока подключить блок-датчик (Sensor) [1, 2, 4, 5].
29

Си б А Д
Рис. 30. Системы координат двухзвенногоИфизического маятника
30