

2158
.pdfС |
|
|
а |
|
б |
|
бА |
|
Р с. 31. Модель двухзвенного физического маятника (а) для исследования |
||
|
законов движения его звеньев (б) |
|
киДатч могут регистрировать и угловые колебания, и линей- |
||
ные, пр чем как перемещение, так и скорость, и ускорение. Выход с |
||
датчика обычно выводят на лок осциллографа Scope (рис. 31). |
||
|
Порядок моделирования |
|
1. |
Собрать в пакете SimMechanics модель двухзвенного физиче- |
|
|
|
Д |
ского маятника и проведите ее анализ. |
||
2. |
Задать начальное положение маятника 12 deg. |
|
3. |
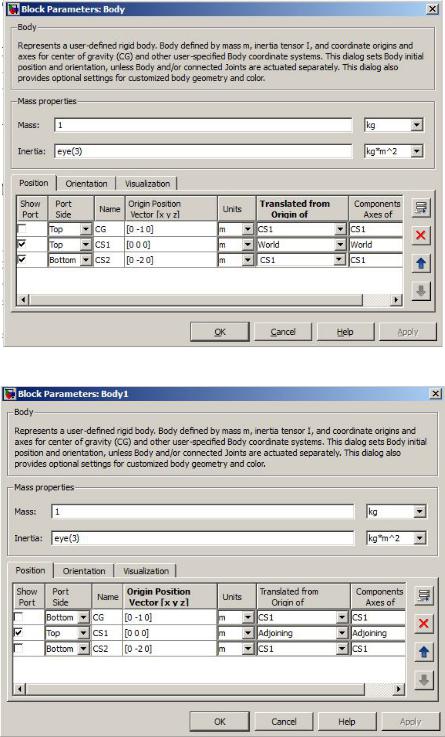
Настроить параметры звеньев (рис. 32, 33). |
|
4. |
В меню Simulation выбрать пункт Mechanical Environment. |
|
Здесь можно задать параметры механического моделирования (значе- |
||
ния ускорения свободного падения, точность расчетов, способ ото- |
||
бражения работы механизма и пр.). Внести изменения только во |
||
вкладку Visualisation (рис. 34). |
|
|
5. |
Запустить модель, при этом наблюдая за колебаниями маят- |
|
ника. |
|
|
6. |
Запустить модель с различными начальными условиями. |
|
|
|
И |
31
Си бАР с. 32. Настройки первого звена
Д
Рис. 33. Настройки второго звенаИ
32

С |
|
|
|
и |
|
||
|
б |
|
|
|
Р с. 34. Задание параметров визуализации механизма |
||
|
|
А |
|
|
|
Содержание отчета |
|
1. |
Название ла ораторной ра оты и ее цель. |
||
2. |
Краткая теоретическая справка о моделировании механиче- |
||
ских систем. |
Д |
||
3. |
|
||
Модель двухзвенного маятника. |
|
||
4. |
Графики движения звеньев или сопряжений для различных |
||
параметров модели. |
|
|
|
|
|
Контрольные вопросы |
|
1. |
|
|
И |
Какие основные блоки содержатся в библиотеке |
|||
SimMechanics? |
|
|
|
2. |
Особенности имитационного моделирования кинематических |
||
механизмов в Simulink. |
|
||
3. |
Какие системы координат вы знаете? |
|
|
4. |
Что такое абсолютно твердое тело? Сколько степеней свободы |
||
имеет твердое тело? Сколько независимых скалярных уравнений требуется для описания движения твердого тела?
33

Лабораторная работа №6
Моделирование кривошипно-шатунного механизма при помощи пакета SimMechanics
В лабораторной работе необходимо создать кинематическую модель кривошипно-шатунного механизма (рис. 35) и исследовать закон движения поршня. Массоинерционные параметры механизма
|
приведены в табл. 1. |
|
|
|
|
|
|
|
С |
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
Рис. 35. Расчетная схема кривошипно-шатунного механизма |
|
|
|||||
|
|
|
|
|
|
|
Таблица 1 |
|
|
Массоинерционные параметры кривошипно-шатунного механизма |
|||||||
|
бА |
|
|
|
||||
|
|
Кривошип |
|
Шатун |
|
|||
|
Масса, кг |
|
1 |
|
|
1,5 |
|
|
|
Тензор инерции,г/см² |
50 |
Д0 0 80 0 0 |
|
||||
|
|
0 |
50 |
0 |
0 |
80 |
0 |
|
|
|
0 |
0 |
300 |
0 |
0 |
500 |
|
|
|
|
|
|
И |
|
||
Порядок выполнения работы
1.Создать новую Simulink-модель.
2.Проектирование механизма начинается с неподвижного звена
– земли. Для этого необходимо воспользоваться пакетом расширения SimMechanics, во вкладке Bodies выбрать блок Ground. В параметрах блока указать координаты [0; 0; 0], это означает, что координаты блока совпадают с началом инерциальной системы координат.
3.Кривошип может совершать только вращение вокруг оси OZ, поэтому в качестве шарнира нужно использовать блок Revolute из
34

вкладки Joints. В параметрах блока указать [0; 0; 1], таким образом задается возможность вращения вокруг оси OZ.
4.Добавить кривошипное звено в модель механизма, для этого необходимо воспользоваться блоком Body. Настроить параметры
блока (рис. 36). |
|
|
|
|
|
С |
|
|
|
|
|
и |
|
|
|
|
|
бА |
|
||||
|
Для |
|
|||
Рис. 36. Параметры блока Body, моделирующего кривошип |
|
||||
5.К спроектированной части механизма добавить привод. Доба- |
|||||
вить вращение к шарниру Revolute. |
этого в параметрах блока |
||||
|
|
|
|
И |
|
Revolute необходимо указать вход/выход для привода/датчика. К это- |
|||||
му входу подсоединить блок Joint Actuator из вкладки Sensors and Ac- |
|||||
tuators. |
|
|
|
|
|
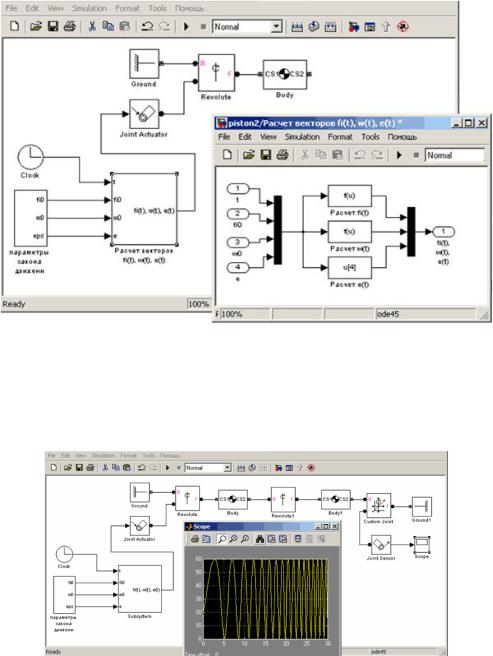
6.Для задания закона движения, формируемого в звене Joint |
|||||
Actuator, необходимо задать три параметра – вектора φ(t), ω(t), ε(t). |
|||||
Поэтому к входу блока Joint Actuator необходимо подать необходи- |
|||||
мые векторы. Величины φ0, ω0, ε – известны, можно определить зави- |
|||||
симости φ(t), ω(t), ε(t): |
|
|
|
|
|
|
|
|
t2 |
|
|
(t ) |
|
t |
|
; |
(17) |
|
2 |
||||
|
0 |
0 |
|
|
|
35
|
|
(t ) 0 t; |
|
(18) |
|
|
(t ) const. |
|
(19) |
Реализоватьприведенныезависимостиввидеподсистемы(рис.37). |
||||
С |
|
|
|
|
и |
|
|
||
|
бА |
|
||
|
Рис. 37. Подсистема привода кривошипа. |
|
||
7. |
Запустить часть модели. |
|
|
|
8. |
Самостоятельно |
Д |
||
доработать |
модель |
кривошипно- |
||
шатунного механизма (рис. 38, 39). |
|
|
||
|
|
|
И |
|
|
Рис. 38. Модель кривошипно-шатунного механизма |
|||
36
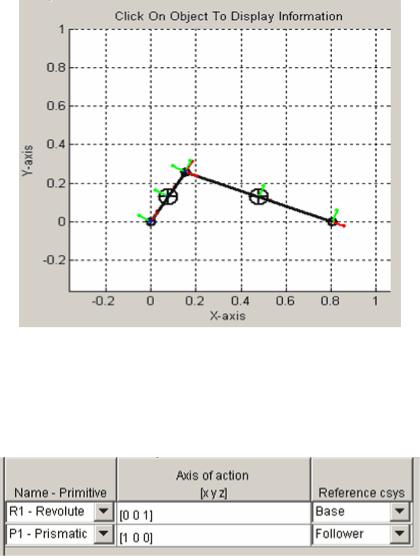
Смодели Р сбА. 39. Ан мац я кривошипно-шатунного механизма
Пр мечан я. Для создания сопряжения между шатуном и не-
подвижным звеном можно использовать блок Custom Joint со степенями свободы, показанными на рис. 40 [1, 2].
воспользоваться следующими значениямиД[L1+L2; 0; 0].
Рис. 40. Параметры блока Custom Joint
При указании координат второго неподвижного звена можно
Для исследования закона движения поршня целесообразно добавить датчик перемещения Joint Sensor, а его выход подключить к осциллографу Scope.
Содержание отчета
И
1.Название лабораторной работы и ее цель.
2.Модель кривошипно-шатунного механизма.
3.Графики движения звеньев или шарниров для различных параметров модели.
37

Контрольные вопросы и задания
1. Почему угловая скорость является вектором? Куда направлен этот вектор?
2. Запишите компоненты тензора инерции для однородного тела
С |
|
правильной геометрической формы (стержня, диска, цилиндра). |
|
3. Как задаются законы движение звеньям механизмов? |
|
|
Лабораторная работа №7 |
и |
|
нтез регулятора механических колебательных систем |
|
Колебательная с стема (КС) – физическая система, в которой |
|
бА |
|
в результате нарушен я состояния равновесия возникают собственные колебан я, о условленные свойствами самой системы [1].
С энергет ческой стороны КС делятся на: консервативные системы, в которых нет потерь энергии или которые можно с достаточной точностью сч тать лишёнными таких потерь (механические системы без трения); диссипативные системы, в которых первоначально сообщенная энергия не остается в процессе колебаний постоянной, а расходуется на ра оту, в результате чего колебания затухают; автоколебательные системы, в которых происходят не только потери энер-
|
Д |
гии, но и пополнение ее за счет имеющихся в системе источников |
|
энергии [1]. |
|
|
И |
Рис. 41. Механическая колебательная система
38
В данной лабораторной работе будем рассматривать механическую колебательную систему, состоящую из подвижной массы m на роликах, которая находится на безмассовой платформе. Колебательная система представлена на рис. 41 [1].
Так как m – единственная масса в системе (см. рис. 41), то для нее можно записать второй закон Ньютона
|
|
|
|
|
|
F ma, |
|
|
(20) |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где а – ускорен е тела, м/с2; F – силы, действующие на подвижный |
|||||||||||||||
груз, Н; m – масса, кг. |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
С |
|
a |
|
|
d2 y |
; |
|
(21) |
|||||||
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
dt |
2 |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
2 |
y |
|
|
|
|
|
|
|
|
|
|
||||
иd |
|
|
|
|
|
|
|
|
|
|
|||||
m |
dt2 |
|
k(y u) 0; |
(22) |
|||||||||||
|
|
d2 y |
k(y u); |
(23) |
|||||||||||
m |
|
|
2 |
||||||||||||
|
|
dt |
|
|
|
|
|
|
|
|
|
||||
|
|
d2 y |
|
|
|
|
|
k(y u) |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
, |
(24) |
||
|
|
|
2 |
|
|
|
|
|
|
||||||
|
|
dt |
|
|
|
|
|
|
m |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|||||
бА |
|
||||||||||||||
Теперь представим модель Дсистемы в виде пространства состояний. Уравнения объекта управления должны быть записаны в нормальной форме Коши, т.е. системой уравнений первого порядка. В нашем же случае имеем уравнение второго порядка, поэтому необхо-
где y, u – продольные координаты подвижной массы и безмассовой тележки соответственно.
|
|
|
|
|
|
Тогда получим в про- |
|
димо ввести фиктивную переменную y z . |
|||||||
странстве состояний [1] |
|
|
|
|
|
И |
|
|
|
|
|
|
|||
|
y z; |
|
|
|
|
|
|
|
k(y u) |
k |
|
k |
|
||
z |
|
|
|
|
y |
|
u. |
|
m |
m |
|||||
|
m |
|
(25) |
||||
39
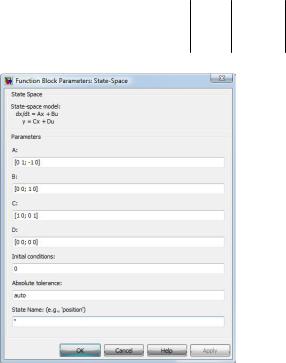
Для моделирования такой системы в Simulink можно воспользо-
ваться блоком State–Space (Simulink / Continous). Для использования
этого блока необходимо представить уравнения объекта управления в |
|||||||||||||||
матричном виде. Блок State–Space требует, чтобы число входов, число |
|||||||||||||||
выходов и число переменных состояний системы совпадало, однако в |
|||||||||||||||
С |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
рассматриваемой системе один вход и выход, но две переменные со- |
|||||||||||||||
стояния. Эта проблема решается с помощью фиктивных входов и вы- |
|||||||||||||||
ходов [1]. |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Вектором состоян й является X=(y,z), входом – U=(u,.), выходом |
||||||||||||||
– Y=(y,.). Точка в данном случае обозначает фиктивную переменную. |
|||||||||||||||
Тогда в матр чном в де динамика системы запишется [1] |
|
|
|
||||||||||||
|
|
|
|
0 |
1 y |
0 |
|
0 u |
|
|
|
|
|||
|
|
y |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
бА |
|
|
|
(26) |
||||||||||
|
|
z |
|
k / m |
0 |
z |
k / m |
0 . |
|
|
|
||||
Илив матр чном виде окончательно [1] |
|
|
|
|
|
|
|||||||||
|
|
|
|
X AX BU; |
|
|
|
|
|
|
|
||||
|
|
|
|
Y CX DU, |
|
|
|
|
|
|
(27) |
||||
где |
|
|
|
|
|
|
|
Д |
|
|
|||||
|
|
0 |
1 |
|
0 |
|
|
|
|||||||
|
A |
, B |
|
0 |
, C |
1 |
0 |
, D |
0 |
0 |
. |
(28) |
|||
|
k / m 0 |
k / m 0 |
0 0 |
0 0 |
|||||||||||
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
И |
||||||
Рис. 42. Свойства блока State-Space
40