

2. ПРОЕКТИРОВАНИЕ ВИНТОВЫХ ЭЛЕКТРОМЕХАНИЧЕСКИХ ПОДЪЕМНИКОВ
2.1. Устройство подъёмника
СОсновной рабочей функцией подъемников является поднятие и удержание машины на определенной высоте при его ТО и Р, при этом должен обеспечиваться максимальный доступ к обслуживаемым узлам [1, 3, 4].
Вар анты задан й приведены в приложении 1. приводЭлектромехан ческие подъемники – устройства, исполнительным элементом которых является передача винт – гайка скольжения,
мая от электродвигателя. Они могут быть 1, 2, 4, 6 и 8-ти
стоечными, грузоподъемностью от 1,5 до 14 т, и более. Наибольшее
|
грузоподъемность; |
|
внутреннее расстояние между стойками В – один из основных |
|
бА |
параметров, определяющих удобство работы. Большинство моделей |
|
имеют размер В от 2,4 до 2,9 м. Чем больше В, тем удобнее проводить |
|
работы, однако при этом возрастают нагрузки на стойки; |
|
минимальная высота опускания подхватов при установке |
|
автомобиля на подъемник, у современныхДподъемников равна 0,1 м; |
|
высота подъема Нп, обычно Нп= 1,7... 2,0 м. |
|
|
Расчет винтовых электромеханических подъемников осуществ- |
определяют геометрические параметры каретки и опорных |
|
|
И |
роликов, обосновывают форму и размеры поперечного сечения |
|
стойки; |
|
определяют геометрические параметры винтовой пары;осуществляют подбор приводного электродвигателя и пере-
даточное число механизма от электродвигателя к грузовому винту, подбирают или проектируют передаточный механизм;
12

выбирают конструкцию стойки и подхватов, рассчитывают сечение.
Двухстоечный напольный подъемник (рис. 2.1) состоит из двух коробчатых стоек 1 и поперечины 2. В каждой стойке размещен ходовой винт 3, по которому перемещается грузоподъемная гайка 4 с
Сраздвижными подхватами 5. Ходовые винты приводятся во вращение от электродвигателя 6 через редуктор 7, установленный на одной из стоек [1, 3, 4]. Вращение на другой винт передается с помощью цепной передачи 8, смонтированной внутри поперечины 2. Подъемник креп тся к полу анкерными болтами 9. Упорные ролики 10 освобождают в нт от изгибающих усилий.
бА Д И
Рис. 2.1. Винтовой электромеханический подъемник: 1 – стойка; 2 – поперечина; 3 – винт; 4 – гайка;
5– подхват; 6 – электродвигатель; 7 – редуктор; 8 – цепная передача; 9 – анкерный болт;
10 – упорные ролики
13
Выпускаются также 4-стоечные и 6-стоечные подъемники, которые используются для вывешивания грузовых автомобилей и автобусов. Имеются одностоечные подъемники, используемые в комплекте из 4-х или 6-и стоек. Эти стойки передвижные и могут быть установлены в любом помещении с ровным полом. Управление работой стоек осуществляется с передвижного пульта, обеспечивающего их синхронную работу. В рассмотренных подъемниках вращаются в нты, а гайки неподвижны. Есть конструкции подъём-
ников с неподв жными винтами и вращающимися гайками. В этом |
||||
случае электродв гатель и редуктор устанавливаются на подъемной |
||||
раме, а вращен е гаек осуществляется цепной передачей, смонтиро- |
||||
С |
|
|
|
|
ванной в пустотелой коро ке подъемной рамы [1, 4]. |
|
|||
Пр меры о щего вида подъёмника и сборочного чертежа стойки |
||||
в пр ложен ях 2 и 3. |
|
|
|
|
2.2 Расчёт основных параметров |
|
|||
приведены |
|
|
|
|
Нагрузка на од н винт (на одну стойку) подъемника, Н [4] |
|
|||
бА |
|
|||
F |
Ga |
Кр |
, |
(2.1) |
|
|
n |
|
|
где n – число стоек; Ga – сила веса автомобиля, Н; Kp – коэффициент неравномерности распределения силы веса по стойкам. Большее значение берется для 4-х стоечных, а меньшее – для 2-х стоечных
подъемников. |
|
|
|
Длина плеча подхвата (рис. 2.2) |
|
|
|
СD |
1 B L, |
|
(2.2) |
где B – ширина автомобиля, м; L |
4 |
И |
|
– запас по ширине на сторону, м. |
|||
Меньшее значение L берется дляДлегковых автомобилей. |
|||
Диаметр роликов d берут |
в пределах 0,05...0,07 м. |
Можно |
|
задаться расстоянием АК и определить длину роликов. Можно поступить наоборот. Обычно AK=(0,3…0,5)CD; СK=(0,5…0,7)AK.
Силы, действующие на ролики, определяют исходя из системы уравнений
Ma |
Rk AK QCD 0 |
, |
(2.3) |
||
X |
Ra Rk 0 |
|
|||
|
|
|
|||
Отсюда Rk =QCD/AK; |
Ra |
Rk независимо от соотношения размеров |
|||
AK и CD. |
|
|
|
|
|
14

Если ролик и направляющая поверхность ролика не термообработаны, они рассчитываются на смятие. Но при этом
допускаемые напряжения сравнительно малы и ролики по длине и |
||||
диаметру получаются очень большими. Поэтому, как правило, |
||||
контактирующие поверхности подвергаются термообработке и |
||||
С6 |
6 |
|
|
|
рассчитываются по контактным напряжениям, Па, [1] |
|
|||
|
k 0,418 |
qEпр |
, |
(2.4) |
|
|
rпр |
|
|
где [ к] – допуст мые контакные напряжения при линейном контакте |
||||
азотирован |
|
|
[ к] |
|
роликов |
направляющ х, Па, [ к] =2,8 т при объемной закалке; |
|||
=5 10 (HRC) – при закалке ТВЧ; [ к]=40 10 (HRC) – при цементации и |
||||
|
поверхностей (HRC – твердость поверхностей по |
|||
Роквеллу, |
бА |
|
||
т – предел текучести, Па, для качественных конструк- |
||||
ционных сталей т=650 106Па, а после термообработки HRC = 45…50); Епр – пр веденный модуль упругости, Епр=2Е1Е2/(Е1+Е2); rпр – приведенный рад ус кривизны контактирующей поверхностей роликов направляющих элементов стойки; q – распределенная нагрузка на пару роликов, Н/м.
|
|
Д |
|
||||
|
|
|
|
|
|
И |
|
Рис. 2.2. Схема действия сил на опорные ролики |
|
||||||
Если ролик и направляющая изготовлены из одинакового |
|||||||
материала, то Епр=Е1=Е2, |
|
|
|
|
|
|
|
1 |
|
1 |
|
1 |
, |
(2.5) |
|
|
rпр |
r1 |
|
||||
|
|
|
r2 |
|
|||
где r1 – радиус ролика; r2 – радиус направляющей. Если r2= , то
15
|
|
1 |
|
|
1 |
. |
|
|
(2.6) |
|||
|
|
|
rпр |
|
|
|
|
|||||
|
|
|
|
|
r1 |
|
|
|||||
После подстановки полученных результатов в уравнение (4) и |
||||||||||||
замены r1 |
через d/2 распределенная нагрузка [4] |
|
||||||||||
С |
|
|
|
|
|
|
|
q |
|
|
||
|
|
q |
|
|
k 2 d |
, |
(2.7) |
|||||
|
|
|
|
2*0.174Es |
|
|||||||
где s=1,2,…1,3 – коэфф циент запаса; |
|
|
||||||||||
Дл на рол ка, м, |
|
|
|
|
|
|
|
|
|
|
|
|
ки |
|
l |
Rk |
, |
|
(2.8) |
||||||
|
|
|
|
|
|
|
|
|||||
Рол |
в процессе качения |
по направляющим |
создают |
|||||||||
дополн тельное ус л е на винте, Н, |
|
|
||||||||||
|
бА |
(2.9) |
||||||||||
|
|
|
|
|
|
Fg Rk |
fz, |
|||||
где f = 0,01 - коэфф ц ент трения качения; z - число роликов в стойке. |
||||||||||||
Уточненное ус л е на винте, Н, |
|
|
||||||||||
|
|
|
|
|
Fy F Fg , |
(2.10) |
||||||
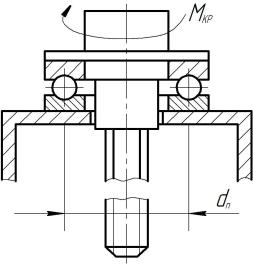
Длина винта принимается равной высоте подъема автомобиля. Винт на устойчивость не считается, т.к. обычно он выполняется висячим, с опорой в верхней его части (рис. 2.3). В качестве опоры используются упорные или радиально-упорные подшипники, или сборные узлы специальной конструкцииД.
И
Рис. 2.3. Пример конструктивного исполнения верхней опоры грузового винта
16

Внутренний диаметр винта ориентировочно определяют из расчёта на сжатие по пониженному на 30 % допускаемому напряжению
|
|
|
|
dв |
|
|
|
4F |
|
|
, |
(2.11) |
|||||
|
|
|
|
0,7 сж |
|||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||
где [ сж]– допускаемые напряжения сжатии материала, Па |
|
||||||||||||||||
|
|
|
|
сж В / n , |
|
|
|
(2.12) |
|||||||||
где n = 2,5…3 – коэфф циент запаса прочности; â = 180…200 Па. |
|||||||||||||||||
Рассч тав |
dв, |
например |
по |
|
ГОСТ 9484-81 |
«Резьба |
|||||||||||
самоторможения |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
трапец |
дальная. Профили» выбирают для трапецеидальной, резьбы |
||||||||||||||||
Сшаг Р, средн й д аметр dср |
резьбы и наружный диаметр dн . Для |
||||||||||||||||
прямоугольной |
ли упорной резьб пользуются другими ГОСТами. |
||||||||||||||||
Для |
|
|
нео ходимо, |
чтобы , где – угол |
|||||||||||||
|
|
необходимо |
|
|
|
|
|||||||||||
подъема в нтовой л |
; – угол трения. При коэффициенте трения |
||||||||||||||||
в паре в |
нт-гайка f = 0,1, = 5,5 , =4…5 . |
|
|||||||||||||||
Затем проверяют условие самоторможения винта, [4] |
|
||||||||||||||||
|
|
|
А2 |
(2.13) |
|||||||||||||
|
|
|
|
arctg P |
/ dср |
, |
|
||||||||||
Если , |
|
|
уменьшить шаг винта. |
|
|||||||||||||
Наружный диаметр гайки D, м, определяют из условия |
|||||||||||||||||
прочности |
её тела на |
растяжение |
с допущением, что вся сила F |
||||||||||||||
|
|
|
|
|
|
Д1 |
|||||||||||
воспринимается той частью гайки, которая расположена вне фланца |
|||||||||||||||||
|
|
|
|
D |
|
4F |
dí , |
(2.14) |
|||||||||
|
|
|
|
ð |
|||||||||||||
где [ р]– |
допускаемые напряжения при растяжении материала, Па, |
||||||||||||||||
выбираются по табл. 2.1. |
|
|
|
|
|
|
|
|
|
|
|
И |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Наружный диаметр фланца гайки D , м, определяют из условия |
|||||||||||||||||
прочности на смятие |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
D |
|
4F |
|
|
D2 , |
(2.15) |
|||||||
|
|
|
|
|
см |
||||||||||||
|
|
|
|
1 |
|
|
|
|
|
|
|||||||
где [ см]– допускаемые напряжения при смятии материала, Па, |
|||||||||||||||||
выбираются по табл. 2.1. |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Высота гайки H и число витков z гайки: |
|
||||||||||||||||
|
|
|
|
|
|
H=k dн, |
|
|
|
(2.16) |
|||||||
|
|
|
|
|
z |
H |
, |
|
|
|
|
(2.17) |
|||||
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
P |
|
|
|
|
|
|
|
|
17

При z 10 необходимо либо увеличить диаметр резьбы, либо переходить на другие материалы.
Длину винта выбирают конструктивно в зависимости от высоты подъёма.
|
Расчет крутящего момента, прилагаемого к винту на упорном |
|||||||||||||||
С |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
подшипнике |
|
|
dср |
|
|
|
|
|
d |
|
|
|
|
|
|
|
|
Mкр |
Fy |
|
|
tg Fy f1 |
|
n |
, |
|
(2.18) |
|
||||
|
где f1 0,01, а dп |
|
|
|
2 |
|
|
|
|
|
2 |
|
|
|
|
|
|
– |
диаметр |
|
дорожки |
тел |
|
качения |
упорного |
||||||||
|
напряжения |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
подшипн ка, м. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 2.1 |
|
|
Допуст мые |
|
|
|
для материалов деталей передач |
|||||||||||
|
бА |
|
|
|||||||||||||
|
|
винт – гайка скольжения |
|
|
|
|
|
|
||||||||
|
Параметр |
|
|
|
|
|
Материал |
|
|
|
|
|
Значение, |
|
||
|
|
|
|
винта |
|
гайки |
|
МПа |
|
|||||||
|
Допуст мое давлен е в |
Закалённая сталь |
|
Бронза |
|
10…13 |
|
|||||||||
|
паре винт-гайка |
|
Незакалённая |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
сталь |
|
Чугун |
|
5…6 |
|
|||||||
|
Допустимое напряжение |
|
|
|
|
|
|
|
Бронза |
|
42…55 |
|
||||
|
при смятии для материала |
|
|
– |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
Чугун |
|
20…24 |
|
||||||
|
гайки |
|
|
|
|
|
|
|
|
|
|
|||||
|
Допустимое напряжение |
|
|
Д |
|
|
||||||||||
|
при растяжении для |
|
|
|
– |
|
|
|
|
Бронза |
|
34…44 |
|
|||
|
материала гайки |
|
|
|
|
|
|
|
|
Чугун |
|
20…24 |
|
|||
|
Допустимое напряжение |
Сталь 45 |
– |
|
|
|
|
130 |
|
|||||||
|
при растяжении или сжатии |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
И |
|
|||||||
|
для материала винта |
|
|
|
|
|
|
|
|
|
||||||
|
|
Сталь 50 |
– |
|
|
|
|
170 |
|
|||||||
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|||||||||||
|
Так как частота вращения вала невелика, подбор подшипника |
|||||||||||||||
|
ведется по статической грузоподъемности |
|
|
|
|
|
|
|
||||||||
|
|
|
|
Fc Fy, |
|
|
|
|
|
(2.19) |
|
|||||
|
Скорость подъема п принимается равной 1,5...2 м/мин. Частота |
|||||||||||||||
|
вращения винта, об/мин, |
|
|
|
|
п |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
nв |
, |
|
|
|
|
|
(2.20) |
|
||||
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
P |
|
|
|
|
|
|
|
||
18
Задаваясь частотой вращения ротора электродвигателя nэдв=750, 1000, 1500 или 3000 об/мин, определяют передаточное число от электродвигателя к винту
С |
|
i |
nэдв |
, |
|
|
|
|
|
(2.21) |
||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
nв |
|
|
|
|
|
|||||||||
Если i |
4, можно использовать для передачи момента от |
|||||||||||||||||
электродвигателя к винту клиноременную передачу. В противном |
||||||||||||||||||
случае необход мо подобрать редуктор. |
|
|
|
|||||||||||||||
Мощность электродвигателя одной стойки [1, 3, 4] |
|
|
||||||||||||||||
используется |
|
|
|
|
|
|
M |
кр nв |
|
|
|
|||||||
|
|
|
N |
Mкр |
|
, |
|
(2.22) |
||||||||||
|
|
|
|
м |
|
|
|
|
|
|
|
|
м |
|
|
|
||
где м – механ ческий кпд трансмиссии. При использовании |
||||||||||||||||||
бА |
|
|
||||||||||||||||
клиноременной |
передачи м |
= 0,96. Если установлен редуктор, |
||||||||||||||||
принимается м |
указанный в справочнике. Если на несколько стоек |
|||||||||||||||||
передачей, то |
од н пр вод, |
|
а |
ходовые винты соединены цепной |
||||||||||||||
|
|
|
|
|
Nэл |
|
nв |
N |
, |
|
|
(2.23) |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
ц |
|
|
|
|||
где ц – кпд цепной передачи. |
|
|
|
|
|
|
|
|
|
|
|
|
действие |
|||||
Стойка |
подъёмника |
испытывает совместное |
||||||||||||||||
|
|
|
|
|
|
Д |
|
|||||||||||
сжимающих и изгибающих нагрузок. Условие прочности при этом |
||||||||||||||||||
запишется в виде |
|
|
|
F |
|
|
FL |
FA , |
|
|
||||||||
|
|
|
|
|
|
|
|
(2.24) |
||||||||||
|
|
|
|
|
S |
|
|
Wy |
Wx |
|
|
|
||||||
где F – осевая сила, учитывающая силу веса поднимаемой машины и силу веса самой стойки, Н; S – площадь поперечного сечения короба стойки, м2; Wx , Wy – осевые моменты сопротивления поперечного короба стойки, м3; А – возможное смещение центра тяжести установленного на подъёмник автомобиля в продольном
направлении, м; [ ]– допускаемые нормальные напряжения для |
|
материала стойки, Па. |
И |
Задавшись профилем стандартного проката для изготовления стойки (лист, пластина, швеллер или др.) и маркой стали необходимо проверить соблюдение условия прочности.
Фундаментные болты, для крепления стойки к полу рассчитывают при условии, что растягивающая сила, возникающая под действием опрокидывающего момента стойки, воспринимается
19