

Раздел 3. ИЗМЕРИТЕЛЬНЫЕ УСТРОЙСТВА, КОМПЛЕКСЫ И СТЕНДЫ ДЛЯ ПОЛУЧЕНИЯ ПАРАМЕТРОВ АВТОМОБИЛЯ И ШИН
Тема 3.1. Определение углов поворотов управляемых колес автомобиля, углов уводов и боковых реакций
Стойчивости автомоб лей. Анализ влияния конструктивных особенностей рулевого управлен я, подвески, шин, определяющих параметры управляемости автомоб ля, а также износа шин. Применение измерительного комплекса с рег стр рующим устройством данных о боковых реакциях,
Проведение сследовательских испытаний по управляемости и ус-
углах поворотов управляемых колес и векторе скорости всех колес автомобиля, связанных во времени.
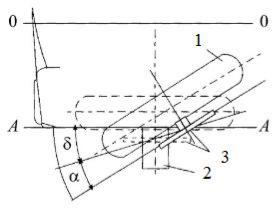
подвески, шинбА, определяющих параметры управляемости автомобиля, а также износа шин. Такая задача может быть решена при применении измерительного комплекса, которыйДпозволяет с помощью киносъемки и тензоступиц фиксировать на регистрирующих устройствах данные о боковых реакциях, углах поворотов управляемых колес и векторе скорости всех колес автомобиля, связанных во времени (рис. 7).
проведен |
сследовательских испытаний по управляемости и |
При |
|
устойчивости автомо |
лей нео ходимо получать достоверную информа- |
цию об углах уводов |
оковых реакциях на колесах автомобиля и харак- |
тере их изменения при криволинейном движении. Это необходимо для |
|
анализа влияния конструктивных особенностей рулевого управления, |
|
 И
И
Рис. 7. Установка кинокамеры на автомобиле для регистрации углов поворотов и уводов колес: 1 – колесо; 2 – кинокамера; 3 – токосъёмник;
4 – планка-указатель угла поворота колеса; 0–0 – продольная ось автомобиля; δ – угол вектора скорости; δ + α – угол поворота колеса
40
В измерительный комплекс входят кинокамеры 2, устанавливаемые над каждым колесом автомобиля и ориентированные перпендикулярно поверхности дороги и параллельно продольной оси автомобиля. При установке камеры над управляемым колесом в поле ее "зрения" находится планка 4, закрепленная на цапфе колеса, что позволяет фиксировать его угол поворота. При движении автомобиля неровности (вкрапления) дороги во время работы кинокамеры "смазываются" в кадре, фиксируя поло-
жение вектора скорости колес. Получая одновременно данные о векторе |
|
скорости угле поворота колеса 1, вычисляют угол увода. Одновременно |
|
с помощью тензоступ цы 3 фиксируют боковые реакции. |
|
С |
|
Тема 3.2. Определение жесткости рулевого управления |
|
Показатели жесткости при расчетных (имитационных) исследова- |
|
ниях управляемости |
устойчивости автомобиля с учетом влияния кине- |
матики рулевого |
. |
управления |
|
бА |
|
На р с. 8 представлена схема определения жесткости рулевого управления. Показатели жесткости необходимы при расчетных (имитационных) исследованиях управляемости и устойчивости автомобиля с учетом влияния кинематики рулевого управления.
Д И
Рис. 8. Схема нагружения (растяжение) рулевого привода для определения его жесткости: 1 – нагружающее устройство (стяжка); 2 – динамометр;
3 – измеритель угла поворота вследствие деформации деталей рулевого привода; L – рычаги нагружения (L = 1 м)
41

Для записи динамических параметров движения может использоваться измерительный комплекс Corrsys Datron, позволяющий определять до 25 параметров движения автомобиля. Основными датчиками комплекса являются: датчик скорости и увода Datron (рис. 9), двухкоординатный бесконтактный измеритель скорости и угла положения кузова Datron, угол
– до 80°, скорость до 40 м/с, измеритель положения колеса по осям х, у, z – С150 мм, угол поворота ±45º, наклона ±10º, измерительный руль, измеритель колебаний колес, измеритель тормозного усилия Datron, а также
электронно-выч сл тельный блок сбора данных.
и бА
Рис. 9. ИзмерительныйДкомплекс Corrsys Datron
Тема 3.3. Определение силовых характеристикИавтомобиля
с помощью дорожных тестеров
Система нагружения и измерения основных систем автотестеров. Принципиальные схемы дорожных силовых тестеров.
Возможные принципиальные схемы силовых автотестеров представлены на рис. 10. Базовыми элементами каждой из них являются: динамометрическая сцепка, обеспечивающая захват объекта испытаний с сохранением ему некоторых степеней свободы и фиксации остальных через си-
42
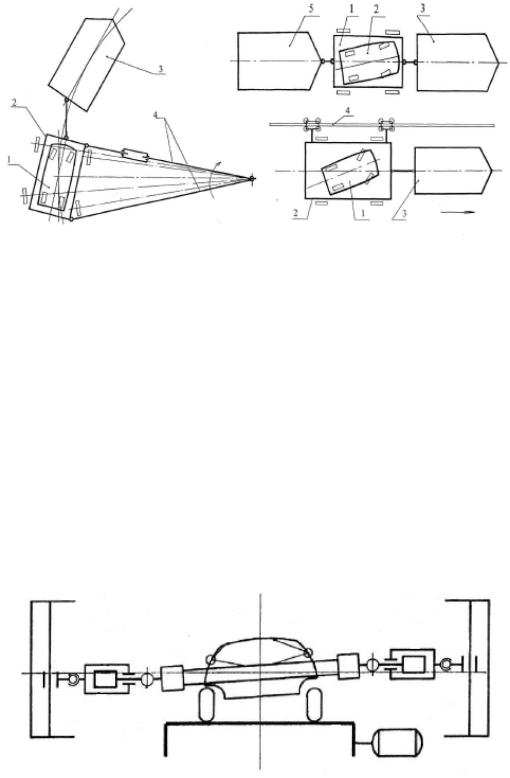
лоизмерительные устройства; замыкающее устройство, обеспечивающее объекту испытаний заданную траекторию движения; тягово-тормозное устройство, обеспечивающее объекту испытаний заданный скоростной режим.
С |
|
и |
|
Р с. 10. Пр нц п альные схемы дорожных силовых тестеров: |
|
1 – |
спытаний; 2 – основная рама автотестера; 3 – тягач; |
|
А |
|
4 – направляющая; 5 – балластное устройство |
АвтотестеробъектМАМИ предназначен для прямого измерения управ- |
|
ляющих и стабилизирующих реакций легковых автомобилей при имита- |
|
ции различных условий движения (рис. 11). Он позволяет независимо за- |
|
|
Д |
давать автомобилю продольный и поперечный крены, а также угол увода |
|
(рыскания) автомобиля относительно траектории движения. Кроме того, |
|
испытуемый автомобиль оснащается дополнительными устройствами для |
|
задания и фиксации угла поворота управляемых колес, положения педали |
|
подачи топлива, |
усилия на тормозной педали. ля возможности испыта- |
|
И |
ния автомобиля в тяговом режиме он оснащается полуавтоматическим приводом сцепления и механизмом переключения передач.
Рис. 11. Принципиальная схема стационарного силового тестера МАМИ
43