

Раздел 6. ИМИТАЦИОННЫЕ ИСПЫТАНИЯ
Тема 6.1. Математическое испытание пространственной модели для определения показателей устойчивости и управляемости автомобиля с учетом действия аэродинамических сил и моментов
Проведение анализа, влияние аэродинамики на управляемость автомобиля. Вл ян я лобового и бокового ветра на поперечное смещение при "переставке".
В настоящее время широко используется компьютерное моделиро- |
|
С |
|
вание, которое позволяет экономить время, труд, материалы, деньги, эко- |
|
логию. На более характерные о стоятельства применения имитационных |
|
моделей: |
|
- |
дет процесс познания объекта моделирования; |
- |
анал т ческ е методы исследования имеются, но составляю- |
если |
|
щие их математ ческ процедуры очень сложны и трудоемки; |
|
- если |
осуществить наблюдение за поведением компо- |
нент системы в течение определенного времени; |
|
- если |
контролировать протекание процессов в системе |
|
необходимо |
|
А |
путем замедления или ускорения явлений в ходе имитации;
-если особое значение имеет последовательность событий в проектируемых системах и модель используется для предсказания так называемых "узких" мест;
-при подготовке специалистов для приобретения необходимых навыков в создании новой техники;
-если имитационное моделирование оказывается единственным способом исследований из-за невозможности проведения реальных экспериментов.
Основные достоинства:
● имитационная модель позволяет в принципе описать моделируе-И
мый процесс с большей адекватностью, чем другие;
●имитационная модель обладает известной гибкостью варьирования структуры, алгоритмов и параметров системы;
●применение компьютерных программ существенно сокращает продолжительность испытаний по сравнению с натурным экспериментом (если он возможен), а также их стоимость.
82
Основные недостатки:
- решение, полученное на имитационной модели, всегда носит частный характер, так как оно соответствует фиксированным элементам структуры, алгоритмам поведения и значениям параметров системы;
- большие трудозатраты на создание модели и проведение экспери-
ментов, а также обработку их результатов;
Сской системы являются спытания по определению характеристик его управляемости устойч вости. Сложность заключается во влиянии на эти
- необходимость получения большого количества эксперименталь-
ных данных, необходимых для ввода в математические модели;
- достаточно высокое (до 35%) расхождение с результатами натур-
ных испытан й.
На более сложными при исследовании автомобиля как механиче-
качества мног х конструктивных особенностей (рулевого управления, подвески, ш н, аэрод намики и др.) автомобиля. Ниже приводятся некоторые модели, пр меняемые для имитационных исследований.
|
, пр меняемые при исследованиях управляемости и ус- |
Модели |
|
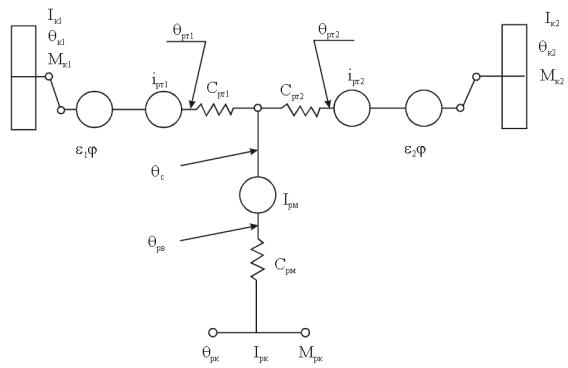
тойчивости автомо ля.Модель рулевого управления приведена на |
|
рис. 31. |
бА |
|
|
|
Д |
|
И |
Рис. 31. Расчетная схема рулевого управления
83

С этой целью для построения, решения и анализа пространственных моделей автомобиля адаптируется программный комплекс моделирования ФРУНД (формирование решений уравнений нелинейной динамики).
Представление уравнений движения связанной системы тел имеет
вид |
|
̈ − = ( ̇, ),; |
(9) |
̈ =( ̇,). |
|
где x – вектор обобщенных координат всей системы размерностью n; |
|||
управляемостиавтомо ля учитывается ряд особенностей. Расчетная схе- |
|||
M – матр ца нерц ; |
– вектор внешних сил, включающий в се- |
||
Сбя силы нагрузок, с лы |
(от̇,упруго), -демпфирующих элементов и гироско- |
||
пические с лы; D – матр ца переменных коэффициентов уравнений свя- |
|||
зей от к немат ческ х пар размерностью k×n (k – число связей); |
– |
||
вектор правых частей уравнений связей; p – вектор множителей |
Лагранжа. |
||
|
( ̇,) |
||
Для спользован я уравнений вида (9) в задачах устойчивости и
ма автомоб ля включает в се я многотельные пространственные кинематические схемы подвесок, в которых звенья соединяются с помощью
|
− |
̈ |
( ̇, ),+ ′ |
+ ′ |
|
, |
|
(10) |
|
|
0 |
= |
|
( ̇, |
) |
|
|
|
|
|
|
|
ФРУНД |
||||||
где D и h – матрицы уравнений связей; |
и |
– векторы правых час- |
|||||||
тей, безr |
строкr бА, соответствующих податливым′ связям′ |
; |
( |
̇,) |
– векторы |
||||
демпфирующих и упругих сил в податливых связях. |
|
|
|||||||
К особенностям моделирования криволинейного движения автомо- |
|||||||||
|
|
|
|
И |
|||||
биля следует также отнести описание продольных сил в шине – сил тяги и |
|||||||||
тормозных сил. В рамках системы моделирования |
|
|
реализована |
||||||
подмодель вычисления продольных сил в шинах для моделирования разгона и торможения, а также для поддержания постоянной продольной скорости движения автомобиля. Продольная сила на колесе вычисляется с учетом текущей вертикальной нагрузки и характеристик сцепления с дорогой.
Силы тяги рассчитываются на основании заданной колесной формулы и потерь в дифференциалах трансмиссии. Предусмотрены четырехколесные схемы с полным приводом и приводом на передние или задние колеса. Для поддержания постоянной продольной скорости, например в режиме движения по неровностям или в повороте, вводится обратная связь
84
по отклонению от заданной скорости. При наличии продольных сил в шине возникающая боковая сила корректируется по условию непревышения результирующей силы, максимально возможной по условиям сцепления.
Факторы, из которых складывается адекватность компьютерной модели, можно разделить на две группы:
- подробность представления кинематической схемы подвески и рулевого механизма, точность описания силовых взаимодействий;
- податливые кинематические пары, боковые и продольные силы в контакте ш ны с опорной поверхностью.
При модел рован |
движения автомобиля по траекториям специ- |
ального в да важное значение имеет также задание контуров управления |
|
системы ВАД. На пр мере модели легкового автомобиля с полной массой |
|
С |
определения статических и кинематических |
2500 кг рассмотрены |
|
характер ст к подвесок, |
также параметров управляемости автомобиля. |
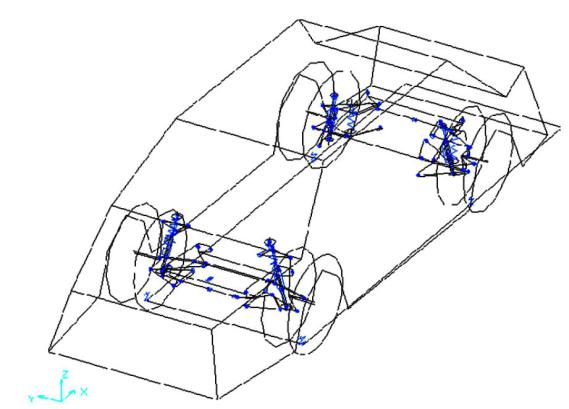
Расчетная схема автомо иля его передней подвески представлена на |
|
рис. 32. Задняя подвеска характеризуется усложненной кинематикой. |
|
задачи |
|
бА |
|
|
Д |
|
И |
Рис. 32. Расчетная схема автомобиля с независимыми подвесками
Для моделирования движения автомобиля уравнения ФРУНД дополняются: вектором сил и моментов, действующих на кузов автомобиля; векторами сил лобового сопротивления, боковой силы, подъемной силы; вектором, компонентами которого являются опрокидывающий момент, поворачивающий момент и момент рысканья; матрицей преобразования
85
из связанной системы координат кузова в неподвижную систему координат. Компоненты векторов аэродинамических сил и моментов определяются по хорошо отработанным и экспериментально проверенным формулам с использованием коэффициентов: аэродинамического сопротивления, плотности воздуха, лобовой площади автомобиля, скорости натекания невозмущенного воздушного потока, боковой и подъемной силы.
Спомощью разработанного описания можно провести анализ влия-
ния аэродинамики на управляемость автомобиля. При этом рассчитывается маневр «переставка» на скорости 80 км/ч. Для выполнения маневра по-
добран закон поворота рулевого колеса автомобиля. Длина переходного
динамическучастка переставки составляет 30 м, боковое смещение – 3 м. Расчеты проводил сь при коэфф циенте сцепления шин 0,7. Центр действия аэро-
х с л наход лся в плоскости дороги в центральной точке, делящей расстоян е между мостами автомобиля пополам, что соответствует положен ю центра пр ведения сил в испытаниях. Рассматриваются параметры дв жен я автомо иля при совершении маневра «переставка» в случае нал ч я дополн тельной ветровой нагрузки. Ветровая нагрузка в модели аэрод нам ческ х сил задается раздельно в продольном и боковом направлен ях. Направление продольного ветрового потока может быть встречным или попутным, поперечного – левым или правым. Большое влияние на изменение траектории автомобиля оказывает боковой ве-
тер, встречный ветер увеличивает его на 10 – 15%.
бА Тема 6.2. МатематическаяДмодель для расчетной оценки
управляемости и устойчивости автомобиля на основе ограниченного количества полигонных испытаний
управляемости и устойчивости автомобиля на основе ограниченного количества полигонных испытаний.
Использование математической модели для расчетной оценки И
Математическая модель для имитационных исследований, базирующаяся на экспериментальных данных натурных испытаний, может обладать достаточной работоспособностью и точностью. Математическая модель описывает «одноколейный» автомобиль с характеристиками «приведенных» шин, включающими в себя динамические параметры реальных шин, системы подрессоривания, кузова и трансмиссии. Модель автомобиля, эквивалентного исследуемому, имеет пять степеняей свободы. Принципиальная схема расчета параметров криволинейного движения автомобиля представлена на рис. 33.
86