

1831
.pdfМАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И СИСТЕМЫ АВТОМАТИЗАЦИИ ПРОЕКТИРОВАНИЯ
Y ° X, v 0 X2 ° X, + X2 +4X,2 + XI ; (5)
где X1 и X2 - непрерывные переменные R- функции.
Согласно формуле (5) прямоугольник Q1 мо¬ жет быть задан неравенством [3]:
X = d1 + b2 - x - У -yj{d2 - x2 )2 + (b2 - y2 )2 > 0 ,(6) а прямоугольник Q2 - неравенством [3]:
X , = c 2 + h 2 - x , 2 - ( y , - f ) 2 2 - x , 2 ) 2 + ( h 2 - ( y , - f ) 2 ) 2 > 0 . ( 7 )
Следовательно, область Q1 = Qj u Q2 может быть задана неравенством:
Y ° Xl v0 X2 ^fd2 +b2 - x2 - y -^(d2 - x2 )2 +(b2 - y )2
(8)
позволяют получать информацию о графиче¬ ских объектах и их взаимном расположении.
Рассмотренная методология создания графических баз данных чертежей металло¬ режущего инструмента автоматизированным способом позволяет создавать параметриче¬ ские модели, на их основе создавать фраг¬ менты чертежей и в случае необходимости осуществлять коррекцию положения указан¬ ных фрагментов. Данный подход позволяет значительно экономить время, необходимое для создания указанных однотипных черте¬ жей.
d +b2 - xf -y2 -^{с!1 - X )2 +(b2 -y2 )2
+ |
> 0 |
+h2 - x2 -(y -f)2 - J ( c 2 - x2 )2 +(h2 -(y -f)2 )2
В таблице 1 приведены наиболее часто ис¬ пользуемые функции-подпрограммы, которые
Таблица 1 - Список функций-подпрограмм, позволяющих получать информацию об объектах и их рас положении
рнческнз о£ь<кхо| н оп*н вшеиьа попил -
г ив--в
РТ
72
-у
0 £ |
« Н в Ч < И Н г II |
Н А п Ш Ч г Н Н * |
|
Н В-ll-flnf-rpflMM |
|
||||||||||
|
|
(Ur-PRAM OIK 01V M UV P i t |
|
|
|
||||||||||
П и ч у - а н м ^ j t y u K i i k . n f l t T |
р и ч е т |
с и н е н и я |
прнис/г-^!- |
||||||||||||
вига |
ж в п р л д ч н м л |
р |
в |
н |
а |
д л в а в г |
. с |
- п . « |
т у |
т ^ ч |
т а P j . 8 К , ^ |
||||
- личы полепи (г-1|-он |
щян-Ф-тьши. |
0 |
1 > - |
||||||||||||
к о о р д и н а т ы ц с н т р д |
прннцу/1-^лкника Ч)"} |
|
|
|
|||||||||||
|
ША 0 1 к Ф ^ |
« < |
0 1 * >х1 М aii hvl N) |
|
|||||||||||
|
|
||||||||||||||
Л р о |
с р |
а н ш осуществляет р а я ч в т давлены обшита., ж е > |
|||||||||||||
1*рВЛ n [ * J ( T J £ . n : * T |
[обо! |
|
* Е * Д Г Е » Ж И В |
|
ЩГЩЮв- |
||||||||||
урс - льнык |
оЪя д е т е й |
V I |
и |
|
|
|
и о п р е д е л я е т п р и н а д л е ж |
||||||||
н о с т ь |
* 11 |
т о ч к и |
Pi |
Icm |
<3l) |
3 x 1 . |
. |
b'j2 |
- дл н н ы |
п о л о - |
|||||
Е'ИН ( 1 W H n t f l N J r ^ - ^ l H H J H U . |
O l X . |
|
. |
0 » V |
- K ^ h M l H - |
||||||||||
н а т и |
ц е н т р » |
|
п р н м о у г о л и к i i i i o t |
|
|
|
|
|
|
||||||
|
|
| s r * r |
i - n . M P N |
p a f j p n p i |
рз> |
|
|
|
|||||||
Программа осуществляет расчет грлннци мн^гоугол- |
|||||||||||||||
|
i i |
D n p f M |
|
|
|
|
|
|
|
|
|
> : ! Ч |
|
|
|
t U i i H H - T ) |
Г-'ЧКПНИ |
P1 |
|
II |
|
F2 |
r f i l H H U f |
MH Of ОуГС-ЛЬН IIKil |
|||||||
I.PN |
- K o J I I H i c T O o |
Ы р Ц Л Ш |
ЫИого>ГОЛЬН|||Ц, |
Fl»H |
- |
||||||||||
к о о р д и н а т ы в г г ш н н |
M H ^ № / r ^ . n t . H i i i ' > j |
|
|
|
|
|
|||||||||
( V r W I ^ M N Pt»i PM P I }
П р 0 4 - р £ М М 2 ОСиЩеСТШЛ HE T nDO-Hef-IO/ ПрКНДДЛе I H OOTH nwta P1 оБпаста, ияюри аадпнв юавгетюхьавхвн
РН - E O J t r r t r r i w нежили к н и к г л г о л ъ в Е Х н , PMN - т»- ОрД11Н9ТЫ MpUJHH HH.-f.-',T-nb-HIIHM
|
|
|
|
АВТОКАД: учеб. пособие. Омск.. ОмГТУ. 2008. |
||||
Библиографический список |
|
112 с. |
|
|
|
|||
1. Притыкин |
Ф.Н. |
Параметрические |
2. |
Шмуленкова |
Е.Е. |
Использование |
||
функций-подпрограмм, |
позволяющих |
|||||||
изображения объектов |
проектирования |
на |
||||||
кодированное |
описание |
процедур |
||||||
основе использования языка АВТОЛИСП в среде |
||||||||
автоматизированного |
распознавания решения |
|||||||
|
|
|
|
|||||
|
|
|
|
задач |
в курсе «Начертательная геометрия» // |
|||
Вестник СибАДИ, выпуск 1 (19), 2011 |
|
|
|
|
61 |
|||
PDF created with pdfFactory Pro trial version www. pdffactory. com
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И СИСТЕМЫ АВТОМАТИЗАЦИИ ПРОЕКТИРОВАНИЯ
Россия молодая: передовые технологии - в промышленность: материалы Всероссийской научн-технич. конф. Омск. 2008. С. 146-150
3. Рвачев В.Л. Методы алгебры логики в математической физике.
Киев: 1974. 256 с.
AUTOMATIC WAY OF THE ESTIMATION OF THE MUTUAL POSITION FRAGMENT SCENES ON DRAWING METAL-CUTTING INSTRU¬ MENT
F.N. Pritykin, E.E. Shmulenkova
In article is considered automated way of the de termination of the mutual location object on drawing metal-cutting instrument. At drawing is created on
УДК 556.324.001.18:519.87:004.42
base parametric 3-D models. Theory of sets is used for analysis geometric object.
Притыкин Федор Николаевич — д.т.н., доцент, заведующий кафедрой «Начертательная геометрия, инженерная и компьютерная графика» Омского госу дарственного технического университета; Основ ное направление научных исследований — исследова ния в области информационных технологий и при менение их в инженерной геометрии и робототехни ке. Общее количество публикаций —120.
E-mail: Pritvkin@mail.ru
Шмуленкова Елена Евгеньевна — аспирантка кафедры «Начертательная геометрия, инженер¬ ная и компьютерная графика» Омского государ¬ ственного технического университета. Основ¬ ное направление научных исследований — авто¬
матизированная |
оценка |
графических построений. |
|
Общее |
количество публикаций -16. |
||
E-mail: |
elenashmulenkova@rambler. ru. |
||
О МОДЕЛИРОВАНИИ РАДИАЛЬНОЙ ФИЛЬТРАЦИИ МЕТОДОМ ЭЛЕКТРОННЫХ ТАБЛИЦ
В. И. Сологаев, Н.В. Золотарев
Аннотация: В данной статье рассматривается построение компьютерной |
мо |
||||||||||||||||
дели радиальной фильтрации с использованием |
электронных |
таблицах |
на |
основании |
|||||||||||||
полевых |
опытов. |
Это |
|
позволяет |
рассчитать |
влияние контура |
промачивания и |
про |
|||||||||
следить |
динамику |
его |
|
развития, |
что важно |
для |
защиты |
техносферы |
от |
подтопле¬ |
|||||||
ния. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ключевые |
слова: |
|
защита от |
подтопления, компьютерное |
моделирование, |
ради¬ |
|||||||||||
альная фильтрация, физическое |
моделирование, |
математическое |
моделирование. |
|
|||||||||||||
Введение |
|
|
|
|
|
|
Это делает методику перспективной для |
||||||||||
Исследование процессов движения подзем¬ |
мелиоративных, |
гидрогеологических |
и |
других |
|||||||||||||
ных вод важно для прогнозирования ситуации, |
расчетов. |
|
|
|
|
|
|
|
|||||||||
складывающейся на мелиорируемых и сели¬ |
|
Как правило, построение модели на элек¬ |
|||||||||||||||
тебных территориях с целью предупреждения |
тронно-вычислительном устройстве произво¬ |
||||||||||||||||
негативных последствий подтопления. |
|
дится за счет интегрирования математической |
|||||||||||||||
Использование |
метода |
электронных таблиц |
составляющей, |
описывающей физический про¬ |
|||||||||||||
(МЭТ) позволяет получить результат, затрачи¬ |
цесс в электронной таблице. |
|
|
|
|
||||||||||||
вая минимум средств, в отличие от применения |
|
Учитываем, что полученный результат мо¬ |
|||||||||||||||
физического или аналогового моделирования. |
дели должен быть проверен на физическом |
||||||||||||||||
Данные задачи решаются при помощи элек¬ |
аналоге с последующим вычислением погреш¬ |
||||||||||||||||
тронных таблиц на вычислительных машинах, |
ности [1]. |
|
|
|
|
|
|
|
|||||||||
обладающих рядом преимуществ: |
|
|
Смоделируем ситуацию с закачкой воды че¬ |
||||||||||||||
• |
доступность |
|
широкому |
кругу |
рез вертикальную скважину в слой грунта |
огра¬ |
|||||||||||
пользователей; |
|
|
|
|
ниченный водоупором (рис. 1). |
|
|
|
|||||||||
• |
простота использования; |
|
|
Методика автора |
|
|
|
|
|
||||||||
• |
применение |
|
различных |
вычис¬ |
|
В качестве исследуемого грунта воспользу¬ |
|||||||||||
лительных |
устройств; |
|
емся песком с правого берега Иртыша. Роль |
||||||||||||||
• |
возможность |
использования |
водоупора выполняет пластиковая емкость (рис. |
||||||||||||||
1). На |
дно установим |
фильтрационное |
кольцо |
||||||||||||||
языков программирования. |
|
||||||||||||||||
|
диаметром 21 см, а посередине располагаем |
||||||||||||||||
|
|
|
|
|
|
|
|||||||||||
62 |
|
|
|
|
|
|
|
Вестник СибАДИ, выпуск 1 (19), 2011 |
|||||||||
PDF created with pdfFactory Pro trial version www. pdffactory. com

МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И СИСТЕМЫ АВТОМАТИЗАЦИИ ПРОЕКТИРОВАНИЯ
перфорированную скважину диаметром 4 см. В рамках данного опыта поверхность должна быть горизонтальной, что предварительно проверя¬ ется уровнем.
Рис. 1. Физическая модель радиальной фильтрации.
Таким образом, у нас есть возможность провести серию опытов по проведению ради¬ ального налива и экспресс откачки [2].
Целью полевых опытов, является получе¬ ние параметров для построения компьютерной модели в электронной таблице, с последующим сравнением результатов.
Налив осуществляется в центральную сква¬ жину до уровня воды 10 см. Запущенный секун¬ домер останавливается в тот момент, когда во¬ да из скважины достигнет кромки внешнего кольца.
При проведении данного опыта расчетное время составило 83 секунды.
Для установления параметра коэффициен¬ та фильтрации, осуществляется экспресс откач¬ ка на рисунке 2.
Ее сущность заключается в том, что при помощи емкости (рис. 2а) вода вытесняется из импровизированной перфорированной скважины, с дальнейшим замером результа¬ тов восстановления напора, изложенных в таблице 1.
Где, Нскв напор в скважине (рис. 2б); At, время наполнения скважины; Qi расход за время Ati.
Кф i определяется по формуле:
|
Кфср. |
(2) |
K ф — |
0,7 + 0,03 • t |
|
|
|
б)
Рис. 2 . Экспресс откачка из скважины представ ленная в двух положениях: а) вытеснение воды из
скважины; б) заполнение скважины.
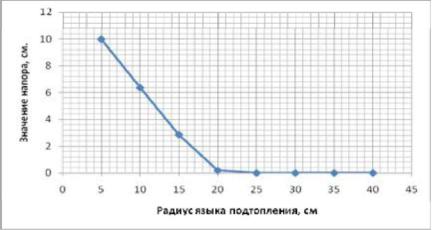
Проверка модели осуществляется при по¬ мощи математического и физического модели¬ рования. Определим радиус языка подтопления используя формулу (3) Сологаева В. И. [0]:
R — Г0 [l + (l,51 - 0,046 • In(t))^Vr ] (3)
теор
где т определяется по формуле: k • H • t
t — |
|
:г- |
(4) |
|
m ^ Г0
Найдем расстояние, которое пройдет язык подтопление за указанное время:
|
R |
— 4 • [l + (l,51 - 0,046 • 1и(8Д3)) • |
] — 20,2 см. |
|
к — |
(1) |
теор |
|
|
|
|
|||
|
|
0,047 • 10 • 83 |
8,13 |
|
Для приведения коэффициента фильтрации |
t — • 0,3 • 42 |
|||
|
||||
к Кф + 10°Сиспользуем формулу Хазена: |
|
Рассчитаем погрешность между теоретиче¬ |
||
|
|
|||
|
|
ской и практической моделью: |
|
|
Вестник СибАДИ, выпуск 1 (19), 2011 |
|
|
63 |
|
PDF created with pdfFactory Pro trial version www. pdffactory. com
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И СИСТЕМЫ АВТОМАТИЗАЦИИ ПРОЕКТИРОВАНИЯ
8 |
Rфакт |
|
пересчета |
(итерацией) т.е. изменение в од¬ |
||
•100% |
ной точке |
повлечет за собой изменение в |
||||
R |
|
|||||
|
факт |
|
соседних точках пространства (таблица 1). |
|||
|
|
|
|
|
||
где Rфaкт — внешний радиус физической модели; — теоретический радиус язы ка подтопления.
8 |
21 - 20,2 •100% = 4 % |
|
21 |
Погрешность 4% указывает, что опыт был проведен верно, т.к. значение погреш¬ ности укладывается в допустимый предел
<5%.
Основой компьютерной модели является закон Дарси [1;4] отображающий, физику перемещения воды в грунтовой толще:
K ф |
АН |
(5) |
|
l |
|||
|
|
где, AH — разность напоров в верхнем и нижнем бьефе; 1<ф — коэффициент фильтрации грунта; l — путь фильтрации;
Взаимодействие электронной и математи¬ ческой составляющей достигается за счет усло¬ вия:
Q1 = Q2 |
(6) |
где, Q1 — входящий расход воды, прохо¬ дящий через узловую точку пространства грунта; Q2 — исходящий расход воды, прохо¬ дящий через узловую точку пространства грунта.
Расход, входящий в ячейку (узловую точ¬ ку) равен исходящему расходу. Таким обра¬ зом, сетку таблицы можно представить в ви¬ де пространства состоящего из узловых то¬ чек, которые связаны между собой циклами
Таблица 1 - Результаты определения коэф фициента фильтрации опытным путем.
Нскв? |
|
|
К ф ъ |
|
К ф |
At, |
|
см/сек |
+10°С |
||
см |
|
см/сек |
|
||
|
|
|
см/сек |
||
|
|
|
|
|
|
3 |
|
|
|
|
|
|
4,31 |
16,8 |
0,0870 |
|
|
5 |
|
|
|
|
|
|
4,44 |
16,3 |
0,0928 |
|
|
5 |
|
|
|
|
|
|
6,21 |
11,6 |
0,0755 |
0,076 |
0,047 |
6 |
|
|
|
||
|
|
|
|
|
|
|
7,44 |
9,73 |
0,0765 |
|
|
7 |
|
|
|
|
|
|
11,39 |
6,36 |
0,066 |
|
|
8 |
|
|
|
|
|
|
20,62 |
3,51 |
0,0575 |
|
|
|
|
|
|
|
|
Электронные таблицы позволяют доста¬ точно быстро собрать и рассчитать малую или среднюю модель области фильтрации с общим количеством узлов до 100000. Сборка крупных моделей ограничена 1 миллионом.
В нашем случае используется 77 узлов. В каждом из которых вводится формула моде¬ лирования (1):
H S+1 |
Dt •k• (H1 i -1 |
|
|
|
|
|
(7) |
||||||
|
|
|
|
|
|
|
|
f . |
Л |
||||
i+1 |
+ ri-1)2 |
|
- ( r i + |
ri-1 |
|
|
|||||||
|
In |
|
In |
|
|
||||||||
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
Iri |
-10 |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|||
моделирования |
существует |
возможность |
в численном (таблица 2), так и графическом |
||||||||||
представления |
полученных результатов |
как |
(рис. 3). |
|
|
|
|
||||||
64 |
Вестник СибАДИ, выпуск 1 (19), 2011 |
PDF created with pdfFactory Pro trial version www. pdffactory. com
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И СИСТЕМЫ АВТОМАТИЗАЦИИ ПРОЕКТИРОВАНИЯ
Рис. 3 Графическое построение радиальной модели.
Как видно из графического построения на |
3. |
Построена компьютерная модель ради¬ |
рисунке 3 при радиальной фильтрации наблю¬ |
альной фильтрации, результаты которой совпа¬ |
|
дается соответствие физической и математиче¬ |
дают с физической моделью. |
|
ской модели, что подтверждает достоверность |
4. |
Формула моделирования (7) отображает |
формулы моделирования. |
динамику движения грунтовых вод и может быть |
|
Вывод |
использована для прогнозирования подтопле¬ |
|
1.В рамках данной физической модели ния.
определены |
основные фильтрационные пара¬ |
5. Полученные |
результаты |
подтверждают |
|||||||||
метры грунта. |
|
|
эффективность использования |
|
электронных |
||||||||
2. |
Полученные результаты проверены на |
таблиц в подобных расчетах. |
|
|
|
|
|||||||
математической модели и являются достовер¬ |
|
|
|
|
|
|
|
|
|||||
ными. |
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица |
2 — Результаты моделирования физической модели радиальной фильтрации. |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
B |
C |
D |
E |
F |
J |
|
H |
|
I |
|
1 |
|
5 |
10 |
15 |
20 |
25 |
30 |
35 |
|
40 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
10 |
0 |
0 |
0 |
0 |
0 |
0 |
|
0 |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
10 |
1,808178 |
0 |
0 |
0 |
0 |
0 |
|
0 |
|
8 |
|
4 |
|
10 |
3,662173 |
0,044339 |
0 |
0 |
0 |
0 |
|
0 |
|
16 |
|
5 |
|
10 |
4,957241 |
0,226145 |
2E-05 |
0 |
0 |
0 |
|
0 |
|
24 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6 |
|
10 |
5,638764 |
0,557525 |
0,00054 |
3,25E-12 |
0 |
0 |
|
0 |
|
32 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
7 |
|
10 |
5,931296 |
0,977295 |
0,003702 |
2,38E-09 |
7,18E-26 |
0 |
|
0 |
|
40 |
|
8 |
|
10 |
6,059683 |
1,419292 |
0,013416 |
1,14E-07 |
3,83E-20 |
2,99E-53 |
|
0 |
|
48 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
9 |
|
10 |
6,140055 |
1,843247 |
0,033899 |
1,58E-06 |
8,8E-17 |
8,54E-42 |
|
0 |
|
56 |
|
10 |
|
10 |
6,214483 |
2,229697 |
0,068424 |
1,09E-05 |
1,7E-14 |
4,5E-35 |
|
0 |
|
64 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
11 |
|
10 |
6,292965 |
2,570864 |
0,118861 |
4,9E-05 |
8,27E-13 |
1,68E-30 |
|
0 |
|
72 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
12 |
|
10 |
6,374298 |
2,865382 |
0,185695 |
0,000164 |
1,71E-11 |
3,98E-27 |
|
0 |
|
80 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Библиографический список |
3. |
Сологаев В.И. Фильтрационные |
||
1. |
Маскет М. Течение однородных |
расчеты и компьютерное моделирова¬ |
||
ние при защите от подтопления в город¬ |
||||
жидкостей в пористой среде. - М. |
||||
ском строительстве: Монография / В. |
||||
Ижевск: Изд-во Физматлит, 2004. - 623 |
||||
И. Сологаев. - Омск: Изд-во СибАДИ, |
||||
с. |
|
|||
|
2002. - 416 с. |
|||
2. |
Мироненко В.А. Шестаков В.М. |
|||
4. |
Шестваков В.М. Бошкатов Д.Н. |
|||
Теория и методы интерпретации опыт¬ |
||||
Опытно-фильтрационные работы. - М.: |
||||
но-фильтрационных работ. - М.: Изд-во |
||||
Изд-во Недра, 1974. - 204 с. |
||||
Недра, 1978. - 326 с. |
||||
|
|
|||
Вестник СибАДИ, выпуск 1 (19), 2011 |
|
65 |
||
PDF created with pdfFactory Pro trial version www. pdffactory. com
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И СИСТЕМЫ АВТОМАТИЗАЦИИ ПРОЕКТИРОВАНИЯ
ABOUT MODELLING OF THE RADIAL FILTRATION BY A MRTHOD OF SPREADSHEETS
V. I. Sologaev, N. V. Zolotarev
In this article we considering how we can construct computer model of the radial filtration in spreadsheets on base field experiments, that al¬ lows to calculate influence of the radial contour infiltration and to track of its
УДК 515.2
Сологаев Валерий Иванович - д-р техн. наук, профессор кафедры «Городское строительство и хозяйство» Сибирской государственной автомо бильно-дорожной академии. Основное направле ние научных исследований - защита от подтоп ления в городском строительстве. Имеет 78 опубликованных работ. e-mail: solooaev@rol.ru
Золотарев Николай Валерьевич - асси стент, Омский Государственный Аграрный Уни¬ верситет. Основное направление научных исследо¬ ваний - Мелиорация, рекультивация и охрана зе мель. Имеет более 6 опубликованных работ. E-mail: zolotarev-nikolai@rambler. ru
ОПРЕДЕЛЕНИЕ ОПТИМАЛЬНОЙ ТОПОЛОГИИ КРАТЧАЙШЕГО ДЕРЕВА ДЛЯ ЧЕТЫРЕХ ТОЧЕК ПЛОСКОСТИ С ПОЛЯРНОЙ МЕТРИКОЙ
К.А. Куспеков, В.Я. Волков
Аннотация. В статье рассматривается методика построения оптимальной конфигурации кратчайшего дерева для четырех точек плоскости с полярной метри кой. К каждой точке приложен вес - коэффициент, учитывающий показатели инже¬ нерной сети.
Ключевые слова: кратчайшее дерево, кратчайшие линии, вес точки.
Введение. При определении оптимальной |
и получим криволинейный четырехугольник |
конфигурации инженерных сетей часто прихо |
M1 q1 N'N"N"'. Заданные токи можно соеди¬ |
дится рассматривать криволинейные трассы, |
нить множеством дугорадиальных отрезков |
которые можно аппроксимировать отрезками |
и получить различные топологии КД4 в за¬ |
прямых и дуг окружностей. Геометрическая мо |
штрихованной зоне (рис.1). Рассмотрим по¬ |
дель таких задач представляет собой плоскость |
строение конфигурации различной тополо¬ |
с полярной метрикой. |
гии КД4 . |
В [1] |
были исследованы и построены |
Miqi |
_ , . ™ ( 5 , . _ |
|
различные топологии кратчайшего дерева (КД) |
||||
|
|
|||
для трех точек плоскости с полярной метрикой. |
|
|
||
При этом к заданным точкам приложены некото |
|
|
||
рая положительная величина q, называемая ве |
|
|
||
сом точки, |
интерпретирующая экономические |
|
|
|
показатели инженерной сети.
Построение оптимальной топологии кратчайшего дерева. Пусть на плоскости с фик¬ сированной полярной системой координат зада¬
ны точки с весами: Mi, q-i, М2, q2 , M3 , q3 , M4, q4 (рис.1).
щ
\V , T / V P
p u / р Л |
\ |
а' |
ъ |
Для |
построения дерева оптимальной |
Рис. 1 Криволинейный четырехугольник, зона под |
|||
топологии |
для |
этих точек, имеющую мини¬ |
|||
вижности КД4 |
|||||
мальную суммарную длину L, определим |
|||||
|
|||||
положение |
и |
координаты |
дополнительно |
Топология 1. Пусть весовые коэффи |
|
вводимой точки Штейнера, оптимизирующей |
циенты имеют одинаковые значения q1 = q2 |
||||
решение задачи аналогично плоскостью с |
= q3 = q 4 . Используем алгоритм [2]: |
||||
евклидовой метрикой [2]. |
|
Шаг 1. Определяем расстояние меж¬ |
|||
Проводи радиальные и дуговые от¬ |
ду заданными точками по формуле: |
||||
резки через |
точки |
M 1 , q 1 , М2, |
q 2 , M3, q 3 , M4, |
q4 |
|
66 Вестник СибАДИ, выпуск 1 (19), 2011
PDF created with pdfFactory Pro trial version www. pdffactory. com

МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И СИСТЕМЫ АВТОМАТИЗАЦИИ ПРОЕКТИРОВАНИЯ
p |
+ |
p2,если jj |
-j21 |
> |
2; |
Msgi |
|
d(M,,M2) — - pj |
+ p2\ + pj |
j j |
- ф 2 \,если j j |
- j2|<2,u,pj<p2 ; |
|||
p j |
- |
p ^ + | |
p 2 ( |
j j |
- |
9^,если j j |
- j 2 | ( 2 , U , p j >p2- |
Наименьшим расстоянием обладают
точки M3 , q3 , M4 , q4 . Через точки M3 и M4 про¬ ведем радиальные отрезки с центром О и
дуговые отрезки M3 ] q3 N' и N"N"'. Получим криволинейный четырехугольник M 3 , q3 N M4, q4 1Ч'"(рис. 2).
Рис. 2. Топология 1 при q1 = q2 = q3 = q4
Радиальные отрезки M4, q4 N M3, q3 N''', а M4 ] q4 N'''<N M3 ] q3 . Поэтому на пер¬ вом шаге соединяем точки кратчайшим рас¬ стоянием M3, q3N''' M4, q4, то есть образуется кратчайшее дерево для двух точек M3, M4 -
КД2.
Шаг 2. Сравниваем расстояние меж¬ ду КД2 и точками M 1 , q1 и M 2 , q 2 . Просчитав все варианты соединения по дугорадиальным отрезкам выявляем, к КД2 нуж¬ но соединить точку M 2 , q2 через узловую точ¬ ку N. Строим КД3 для точки M2, q2 и КД2.
Шаг 3. Соединяем M1, q1 с КД3 через точку N' дуго-радиальным отрезком с узло¬ вой точкой N. Построенная топология крат¬ чайшего дерева для четырех точек имеет минимальную суммарную длину:
L=q(|M1 N'|+|N'N|+|NM3|+|M2N|+|NM4|) = q((|M1N'|+|N'M3|+|M2M4|) или
L=q(|p1 - Pз|+|Pз(ф1 - Ф3) +|p2 - p4|) Топология 2. Пусть весовые коэффици¬
енты q1 > q2 + q3 + q4
Так как в этом случае пункт M1, q1 име¬ ет более значимый вес, можно построить не¬ сколько конфигураций (рис. 3 - а, б, в, г)
б)
в)
г)
Рис. 3. Конфигурация КД4
при q1 > q 2 + q 3 + q 4
Вестник СибАДИ, выпуск 1 (19), 2011 |
67 |
PDF created with pdfFactory Pro trial version www. pdffactory. com
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И СИСТЕМЫ АВТОМАТИЗАЦИИ ПРОЕКТИРОВАНИЯ
Заключение. Таким образом, построив множество вариантов конфигурации КД4, на практике можно моделировать инженерные сети такими кратчайшими деревьями, и по¬ строить сеть, удовлетворяющей наперед за¬ данным требованиям. Очевидно, при различ¬ ных значениях q получит другие топологии. Для построения кратчайших связывающих заданное множество точек линий разработана программа POLSET на языке Турбопаскаль.
Библиографический список
1. Куспеков К.А. Минимальное деревья на Е2 с полярной метрикой. Материалы 6-Международной науно-практической конференции, посвященной 125-летию Национального технического университета «Харьковский политехнической институт» и 10-летию Украинской ассоциации по прикладной геометрии. 21-24 апреля 2009 г. - Харьков, С.93-97.
2. Есмухан Ж.М., Куспеков К.А. Проблемы Штейнера и её прикладной алгоритм. Научный журнал «ПОИСК» №1, 2006, С.227-231.
Definition of optimum topology of the shortest tree for four points of the plane with
polar metrics
K.A. Kuspekov, V.J. Volkov
In article the technique of construction of an optimum configuration of the shortest tree for four points of a plane with the polar metrics is considered. The weight is enclosed to each point - the factor considering indicators of an engineering network.
Волков Владимир Яковлевич - д-р техн. наук, профессор, зав. кафедрой «Начертательной гео метрии, инженерной и машинной графики» Сибир ской государственной автомобильно-дорожной ака демии. Основное направление научных исследований - геометрическое моделирование многокомпонентных многофакторных процессов. Имеет более 200 опуб ликованных работ. E-mail: volkov vv39@mail.ru
Куспеков Кайырбек Амиргазыулы - канд. техн. наук, доцент, зав. кафедрой «Начертательной гео¬ метрии и графики» Казахского национального тех¬ нического университета. Основное направление на¬ учных исследований - геометрическое моделирова¬ ние инженерных объектов. Имеет более 66 опубли кованных работ.
E-mail: kuspekov k@mail.ru
УДК 621.87; 681.5
РЕЗУЛЬТАТЫ СРАВНИТЕЛЬНОГО АНАЛИЗА АЛГОРИТМОВ ПЛАНИРОВАНИЯ ТРАЕКТОРИИ ДВИЖЕНИЯ ОБЪЕКТА С УЧЕТОМ ЕГО УГЛОВЫХ КООРДИНАТ В ТРЕХМЕРНОМ ПРОСТРАНСТВЕ С ПРЕПЯТСТВИЯМИ
В.С. Щербаков, М.С. Корытов
Аннотация. Приводятся некоторые результаты сравнительного анализа алго ритмов планирования оптимальной траектории перемещения объекта произвольной формы с учетом его угловой ориентации в трехмерном пространстве с произволь¬ ными препятствиями, заданными в дискретном виде.
Ключевые слова: планирование оптимальной траектории, поиск пути, трехмер¬ ное пространство, препятствия, угловые координаты
Введение
Проблема оптимизации траектории переме¬ щения объекта в трехмерном пространстве с препятствиями является актуальной. В качестве такого объекта может рассматриваться груз, пе¬ ремещаемый грузоподъемными машинами, ро¬ ботами и манипуляторами.
Авторами были разработаны алгоритмы оп¬ тимизации траектории перемещения объекта с учетом его угловой ориентации на основе наибо¬ лее эффективных современных вычислительных подходов: роевого интеллекта, генетического, вероятностной дорожной карты, декомпозиции линейных и угловых координат, направленного волнового [1,2,3,4,5,6].
68 |
Вестник СибАДИ, выпуск 1 (19), 2011 |
PDF created with pdfFactory Pro trial version www. pdffactory. com
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И СИСТЕМЫ АВТОМАТИЗАЦИИ ПРОЕКТИРОВАНИЯ
Задача сравнения алгоритмов имеет практи ческое применение: необходимо определить, насколько быстро алгоритмы реализуются при помощи средств вычислительной техники, какой объем памяти для них требуется, и насколько они точны.
Сравнительный анализ алгоритмических и программных реализаций методик планирования траектории
Для сравнительной оценки использовалось 3 частных критерия оценки эффективности ал-
горитмов и методик расчета на их основе:
математическое ожидание значения времени расчетов, с; Me - информационная длина ис следуемого алгоритма (требуемый объем па¬ мяти, занимаемой всеми массивами и пере¬ менными алгоритма при его реализации),
байт; 51-усл - математическое ожидание зна чения относительной погрешности к условно¬ му глобальному оптимуму целевой функции, % (таблица 1).
Таблица 1 - Принятые критерии оценки эффективности алгоритмов и методик
Название критерия |
|
Аналитическое |
|
|
Параметры |
||||
|
|
выражение |
|
|
|||||
|
|
|
|
|
|
||||
1. Математическое ожидание |
|
|
|
|
|
|
Тр |
- время расчетов для отдельного |
|
|
|
|
|
|
|
эксперимента, с; ne - число незави |
|||
значения времени расчетов Тр |
|
|
|
|
|
|
|||
|
|
|
|
|
|
симых экспериментов |
|||
|
|
|
|
|
|
|
|||
2. Информационная длина ис¬ |
|
|
|
|
|
|
mm - объем памяти, занимаемый от¬ |
||
следуемого алгоритма Me (тре¬ |
|
|
me |
pe |
|
дельным массивом данных, байт; me |
|||
буемый объем памяти, занимае |
|
|
|
- |
количество массивов данных алго |
||||
|
|
|
|
|
|
||||
мой всеми массивами и пере¬ |
M e |
=Timm)j + Б Ы |
ритма; mp - объем памяти, занимае¬ |
||||||
менными алгоритма при его реа¬ |
мый отдельной переменной , байт; pe |
||||||||
|
|
j=1 |
k=1 |
|
|||||
лизации) |
|
|
|
- |
количество переменных алгоритма |
||||
|
|
|
|
|
|
||||
3. Математическое ожидание |
|
|
1 |
ne |
|
5-усл - относительная погрешность к |
|||
значения относительной погреш¬ |
|
|
|
||||||
|
|
|
|
|
|
||||
8-усл |
= ne |
' Х ( 5 / - у с л |
) i |
условному глобальному оптимуму |
|||||
ности к условному глобальному |
|||||||||
|
|
|
|
|
|
||||
|
|
|
|
|
|
для отдельного эксперимента, % |
|||
оптимуму 31-усл |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
Указанные три частных критерия исполь¬ зовались для сравнительного анализа пред¬ ложенных методик путем сравнения числен¬ ных значений критериев при программной реализации соответствующих алгоритмов, т.е. при применении метода эталонных тестов и проведении вычислительных экспериментов [7,8].
Было проведено несколько серий вычис¬ лительных экспериментов со случайным рас¬ положением препятствий в пределах области рассматриваемых перемещений объекта. По¬ ложение объекта в пространстве описывалось 3 линейными координатами и 2 углами пово¬ рота. Данное сочетание координат, рассмот¬ ренное в качестве примера, описывает до¬ вольно распространенный частный случай положения объекта в форме тела вращения (например, цилиндра).
Наиболее часто при работе грузоподъем¬ ных машин на строительных площадках, в це¬ хах и складских помещениях встречаются препятствия в виде стен, перекрытий, стелла¬ жей, контейнеров, столбов и свай, которые
могут быть описаны в форме параллеле¬ пипедов различных размеров [9].
Методом эталонных тестов производилось сравнение разработанных методик поиска оп¬ тимальной траектории объекта на основе: 1 - направленного волнового алгоритма; 2 - ал¬ горитма роевого интеллекта; 3 - генетическо¬ го подхода; 4 - алгоритма декомпозиции ли¬ нейных и угловых координат; 5 - алгоритма вероятностной дорожной карты; 6 - распа¬ раллеленного алгоритма роевого интеллекта; 7 - распараллеленного алгоритма декомпози¬ ции линейных и угловых координат. Для этого были проведены несколько серий вычисли¬ тельных экспериментов, моделирующих про¬ цесс поиска оптимальной по значению целе¬ вой функции траектории перемещения объек¬ та в среде с полидистантными поверхностя¬ ми , построенными вокруг реальных поверхно¬ стей препятствий [10].
В качестве целевой функции использова¬ лось среднее взвешенное длин линейных и угловых перемещений, выражение которого для отдельной траектории перемещения име¬ ет вид:
Вестник СибАДИ, выпуск 1 (19), 2011 |
69 |
PDF created with pdfFactory Pro trial version www. pdffactory. com

МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И СИСТЕМЫ АВТОМАТИЗАЦИИ ПРОЕКТИРОВАНИЯ
L |
5(V(x i- x i-i)2 + (У> |
-y<-i)2 + iz>-z<-i)2 + cw -i(y< -gi-iY + w -°>i-i)2 |
|
|
/ =2 |
|
|
где imax - число точек отдельной дискретной |
нескольких параллелепипедов, каждый из ко¬ |
||
траектории (im a x =20); cY0J - весовой коэффици |
торых имел случайные размеры. Для всех |
||
ент угловых координат (cY(t)=1); x, y, z, у, ю - |
экспериментов рассматривалось рабочее |
||
соответственно три линейные и две угловые |
пространство в виде куба с размерами |
||
координаты, |
характеризующие |
положение |
10x10x10 условных линейных единиц (УЛЕ) |
объекта. |
|
|
(рисунок 1). |
Исходные |
поверхности препятствий фор |
|
|
мировались случайным образом из сочетания
а) |
б) |
в) |
Рис. 1. Рабочее пространство размером 10x10x10 УЛЕ с детерминированным (а) |
||
|
и стохастическим (б, в) расположением препятствий |
|
Линейные координаты начальной и конеч¬ |
с размерами (РСИ): 100x100x100. То есть, |
|
ной точек положения условного центра груза |
использовался иерархический подход, при |
|
(начала локальной системы координат груза |
котором задание исходной поверхности и ло¬ |
|
OgXgYgZg) принимались постоянными для всех |
кальная оптимизация траектории проводились |
|
экспериментов. Начальная точка имела ли |
с более мелким шагом описания препятствий |
|
нейные координаты (УЛЕ): [xH0; yH0; zH 0 ]=[0; 2; |
(0,1 УЛЕ), а собственно поиск траектории с |
|
5], конечная - [xK0; yK0; zK0]=[10; 2; 5]. Началь¬ |
использованием разработанных методик - с |
|
ные и конечные значения угловых координат |
более крупным шагом описания препятствий |
|
также принимали постоянные нулевые значе¬ |
(0,5 УЛЕ). Это позволило более точно провес¬ |
|
ния (рад): |
[ у Н 0 ; ю Н 0 ] = [ 0 ; 0], [ у ^ ; Юк0]=[0; 0]. |
ти локальную оптимизацию. |
Количество разбиений каждой траектории на кусочно-линейные участки вдоль оси X0 неподвижной системы координат принима¬ лось равным: /m a x =20. Соответственно, макси¬ мальные значения индексов остальных коор¬ динат груза при поиске траектории принима¬ лись равными: jmax=20; /W=20; /max=5; mmax=17 (индексы /, j, k, /, m соответствовали коорди натам x, y, z, у, ю ) .
Сочетание линейных и угловых координат груза позволяет представить область пере¬ метений груза в виде гиперкуба с размерами равномерной сетки индексов (РСИ): 20x20x20x5x17. То есть, полный граф состоя¬ ний объекта при поиске траектории состоял из 680000 вершин.
В то же время для задания исходной по¬ верхности препятствий, построения полидис¬ тантных поверхностей вокруг препятствий и для проведения дискретной локальной опти¬ мизации найденных траекторий, использова¬ лось более подробное описание рабочей об¬ ласти в трехмерном пространстве, в виде куба
Применение иерархического подхода вы¬ звано большой размерностью задачи, слож¬ ность которой экспоненциально возрастает при уменьшении шага дискретизации коорди¬ нат. Переход от исходного к укрупненному описанию линейных координат выполнялся методом редукции. Использовался коэффи¬ циент масштабирования км линейных коорди¬ нат, значение которого принималось равным: км=5.
Для методик, использующих элементы ве¬ роятностного выбора (на основе алгоритмов № 2, 3 и 5), предварительно были проведены несколько серий экспериментов, по 1200 не¬ зависимых экспериментов для каждого соче¬ тания значений варьируемых параметров, на рабочей области с одинаковым, детермини¬ рованным расположением препятствий, зада¬ ваемых высотами поверхности препятствий Ynp(i,k) и описываемых следующими условия ми на РСИ 100x100 (см. рисунок 1,а):
пр(/,к)=2,5 УЛЕ - при (29</<31) и (20<к<80);
70 |
Вестник СибАДИ, выпуск 1 (19), 2011 |
PDF created with pdfFactory Pro trial version www.pdffactorv.com