

1831
.pdfМАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И СИСТЕМЫ АВТОМАТИЗАЦИИ ПРОЕКТИРОВАНИЯ
лиза совместно с биометрическими методами идентификации пользователя по клавиатур¬ ному почерку. Учитывая не только статиче¬ ские характеристики текста (смысл), но и ди¬ намику ввода текста , становится возможным идентификация автора текста с высокой ве¬ роятностью.
Technologies of protection against inter nal threats of informational security
A.E. Sulavko
Disadvantages of existing protection systems against internal threats of informational security
УДК 629.113.012.8
are revealed. Approaches, used in modern data leakage prevention systems, to recognition of the confidential information in an informational stream and efficiency of the given methods, and also the main requirements to data leakage pre vention systems are described. Possible direc¬ tions of the future researches for the purpose of data leak prevention systems improvement are designated.
Сулавко |
Алексей |
Евгеньевич - |
аспирант ка |
|||
федры |
«Информационная |
безопасность» |
Сибир |
|||
ской |
государственной |
автомобильно-дорожной |
||||
академии. |
Основное |
направление |
научных |
иссле |
||
дований |
- |
системный |
анализ, |
информационная |
||
безопасность. |
Имеет |
8 |
опубликованных работ. |
|||
|
|
МАТЕМАТИЧЕСКАЯ |
МОДЕЛЬ |
ВИБРОЗАЩИТНОГО |
УСТРОЙСТВА |
|||||||||||||||
|
|
|
С ЭЛЕКТРОМАГНИТНЫМ |
КОМПЕНСАТОРОМ ЖЕСТКОСТИ |
|
|
||||||||||||||
|
|
|
|
|
|
В.С. Щербаков, |
Н.Л. Левченко |
|
|
|
|
|
|
|||||||
|
|
Аннотация. В статье представлена математическая модель виброзащитного |
||||||||||||||||||
|
устройства транспортного |
средства, |
содержащего |
два яруса подвешивания на базе |
||||||||||||||||
|
резинокордных оболочек и электромагнитный компенсатор жесткости. |
|
|
|
||||||||||||||||
|
|
Ключевые |
слова: |
математическая |
модель, |
виброзащитное |
устройство, |
резино- |
||||||||||||
|
кордная |
оболочка, |
электромагнитный |
компенсатор жесткости. |
|
|
|
|
|
|||||||||||
|
Составление |
математических |
моделей |
действующие на |
электромеханическую |
систе¬ |
||||||||||||||
виброзащитных устройств, в конструкцию ко¬ |
му; q S |
= iS - ток в S-ом контуре при S = 1, 2, |
||||||||||||||||||
торых |
наряду с механической |
частью входит |
., m; t - время протекания процесса. |
|
||||||||||||||||
электромагнитный |
элемент, имеет |
ряд |
осо¬ |
|
||||||||||||||||
|
Лагранжиан |
электромеханической |
систе¬ |
|||||||||||||||||
бенностей. |
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
мы равен |
|
|
|
|
|
|
||||||
|
Механические |
и электромагнитные |
про¬ |
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||
цессы, протекающие в данных системах, су¬ |
|
|
L = T + Wm - (П + Wi), |
|
(2) |
|||||||||||||||
щественным образом |
связаны друг с другом. |
где |
Т |
- кинетическая энергии механической |
||||||||||||||||
Для |
составления |
математических моделей |
||||||||||||||||||
части |
системы; |
П - |
потенциальная |
энергии |
||||||||||||||||
электромеханических |
систем |
используют |
||||||||||||||||||
механической части |
системы; |
Wm |
- |
энергия |
||||||||||||||||
уравнения |
Лагранжа - |
Максвелла, |
являющие |
|||||||||||||||||
магнитного поля системы; |
Wl |
- энергия элек¬ |
||||||||||||||||||
ся |
следствием уравнения Лагранжа 2-го |
рода |
||||||||||||||||||
трического поля системы. |
|
|
|
|
||||||||||||||||
для механических систем с кинетическим по¬ |
|
|
|
|
||||||||||||||||
|
Исследуемое |
виброзащитное |
устройство |
|||||||||||||||||
тенциалом [1] |
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
состоит из двух ярусов подвешивания и элек¬ |
|||||||||
|
d_ SL _dL_ +dF_ = q , (-l = 1, 2, n), (1) |
тромагнитного устройства во втором (верх¬ |
||||||||||||||||||
|
dt 5cjl |
Sql |
5cjl |
l |
|
|
|
|
|
нем) ярусе подвешивания. Каждый ярус под¬ |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
вешивания механической части системы со¬ |
|||||||||
где |
L - кинетический |
потенциал электромеха¬ |
держит |
резинокордные |
упругие |
элементы, |
||||||||||||||
нической системы (Лагранжиан); F - диссипа- |
которым присущи как упругие, так и диссипа- |
|||||||||||||||||||
тивная функция электромеханической системы; |
тивные |
свойства. Электромагнитная |
часть |
|||||||||||||||||
Q i |
- сторонние э.д.с. при l |
= 1, 2, |
m и обоб |
виброзащитной системы |
содержит два конту¬ |
|||||||||||||||
щенные механические силы при l = m+1, |
|
n, |
ра, в каждом из которых находятся две катуш¬ |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
ки индуктивности, соединенных встречно друг |
|||||||||
Вестник СибАДИ, выпуск 1 (19), 2011 |
|
|
|
|
|
|
|
|
|
51 |
||||||||||
PDF created with pdfFactory Pro trial version www. pdffactory. com

МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И СИСТЕМЫ АВТОМАТИЗАЦИИ ПРОЕКТИРОВАНИЯ
другу, с общим сердечником. Расчетная схема двухмассовой модели с электромагнитным устройством представлена на рисунке 1.
Рис. 1. Схема двухмассовой модели виброза щитного устройства
Кинетическая энергия механической части системы находятся по формуле [2]:
т = - ! - м , х2 |
|
+ -!-м7х2 |
(3) |
|||
2 |
1 |
1 |
2 |
2 |
2 |
|
|
|
|
||||
где х1 - обобщенная координата нижнего яруса подвешивания, м; х2 - обобщенная ко ордината верхнего яруса подвешивания, м; х1 - скорость нижнего яруса подвешивания,
м/с; х 2 - скорость верхнего яруса подвешива ния, м/с; М1 - масса нижнего яруса подвеши вания, кг; М2 - масса верхнего яруса подве¬ шивания, кг.
Потенциальная энергия механической части системы [2]:
Работа А1, затраченная в нижнем ярусе подвешивания
А, — (d-A+ Со) А |
(6) |
Нагрузочная характеристика верхнего яруса пневмоподвешивания, определяющая¬ ся экспериментально, содержит нелинейность второго порядка
Q2 = b2 A 2+b,A+bo |
(7) |
здесь Q2 - сила, приложенная к упругому элементу верхнего яруса подвешивания, н, b2 - коэффициент нелинейности второго поряд¬ ка корреляционной формулы, н/м2, b1 - ли¬ нейный коэффициент корреляционной фор¬ мулы, н/м, b0 - сила, соответствующая стати¬ ческому прогибу резинокордной оболочки верхнего яруса подвешивания, н. Жесткость резинокордного элемента верхнего яруса
подвешивания c2 — 2b2A+ b1, н/м.
Работа А2, затраченная в верхнем ярусе подвешивания
А2 — (b2 A 2+b,A+bo) -A. |
(8) |
Тогда потенциальная энергия системы ме¬ ханической части системы:
П = J(o1A + с0 )AdA + J(b2A2 + b1A + b0 )AdA =
0
= J(o1A2 + c0A )dA + J(b2A3 + b1A2 + b0A )dA |
(9) |
|
0 |
||
|
||
= 1 ° i A 3 + 2 ° 0 A 2 + ^ 4 b 2 A 4 + 3 b i A 2 + 2 b 0 A 2 = |
|
|
Д1 |
Д2 |
(4) |
1 |
|
- y ) 2 |
( 2 с 1 ( х 1 - y ) + З С0) + |
П |
( х |
1 |
|||||
|
|
6 |
|
|
|
||
{0 A1dA + J A2dA, |
|
|
|
|
|||
|
|
|
|
|
|
||
где A1 = х1 - y, м; A2 — х2 - х ь м; у — пе ремещение основания конструкции виброза щитного устройства, м; А1?2 — работа, совер¬ шаемая силами упругости резинокордной оболочки при относительном смещении Л, Дж.
Нагрузочная характеристика нижнего яру¬ са пневмоподвешивания определяется фор¬ мулой
Q, — c,-A + Со |
(5) |
здесь Q1 - сила, приложенная к упругому эле¬ менту нижнего яруса подвешивания, н, c1 - жесткость резинокордного элемента нижнего яруса подвешивания, н/м, c0 - сила, соответ ствующая статическому прогибу резинокордной оболочки нижнего яруса подвешивания, н.
( x - x ) 2 ( 3 b ( x - x ) 2 4 b ( x - x )
+ —12 2 1 2 2 1 + 1 2 1 +
Функция рассеивания F — Ф + *Р включает два слагаемых: Ф - диссипативную функцию механической части системы, *Р - электриче¬ скую диссипативную функцию [3].
Диссипативная функция рассеяния энергии является функцией от скорости относительного смещения верхнего и нижнего ярусов подвеши¬
вания A 1 и A 2: |
|
|
|
Ф ^ А |
^ |
А ' + 2 k 2 A , |
= |
= 2 к 1 ( х |
1 |
- y ) 2 + 2 к 2 ( х 2 |
- х 1 ) 2 . |
)
do)
52 |
Вестник СибАДИ, выпуск 1 (19), 2011 |
PDF created with pdfFactory Pro trial version www. pdffactory. com

МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И СИСТЕМЫ АВТОМАТИЗАЦИИ ПРОЕКТИРОВАНИЯ
Энергия электрического поля системы в нашем случае равна нулю, т.к. ни первый, ни второй замкнутый контур системы не содер¬ жит в себе конденсатор Wi —0.
Поэтому Лагранжиан можно записать в виде
L = 1М1хх2 |
+ 1 М2 хх2 -1 (х1 |
- y)2 (2c1 (х1 - y ) + 3c0 )- |
||||
' 2 |
2 |
|
|
|
|
|
1 ( х 2 - х |
1 ) 2 ( 3 b 2 ( х 2 - х |
1 ) |
2 + 4 Ь 1 ( х 2 |
- х 1 ) + |
6 b |
0 ) + |
1 2 |
|
|
|
|
|
|
+ 2w2m |
pd5 |
|
+1,5 |
- |
-)i2 |
(17) |
0~v2sin2 a(52 |
|
|||||
|
- A2) |
sin a |
|
|||
|
L — T - П + Wm. |
|
(11) |
|
Уравнения Лагранжа - Максвелла для |
|||||
Магнитная |
проводимость |
рабочего |
(воз¬ |
обобщенных координат хь х2, i запишутся в |
||||||
душного) зазора, характерная для втяжных |
виде |
|
|
|
|
|||||
электромагнитов с |
конусными |
поверхностями |
|
|
|
|
|
|
||
якоря и стопа определяется формулой [4] |
|
/ _ d _ 5 L _ 5 L |
+ _5F |
|
||||||
|
|
|
|
|
|
|
|
|
Q1 |
|
|
pd2 |
+ 0,75d- 0,157d |
(12) |
|
d 5L |
5L |
|
5F _ |
|
|
g = m 45 sin2 |
a |
sin2a |
|
|
|
|
|
+ — = Q2 |
(18) |
|
|
|
|
|
|
|
|
|
|
|
|
где ц0 - удельная магнитная проводимость |
|
dt 5х2 |
5х2 |
|
5х2 |
|
||||
|
d |
+ 5 ^ = E. |
|
|||||||
среды, гн/н; d - диаметр сердечника и стопа, м; |
|
|
||||||||
|
dt 5 i |
|
i |
|
||||||
5 - зазор между якорем и стопом, когда систе |
|
|
|
|
|
|
||||
ма находится в равновесии, м, |
2а - плоский |
|
Здесь Q1 - обобщенные механические си¬ |
|||||||
угол при вершине конуса якоря. |
|
|
лы, действующие на входе в систему, Q2 - |
|||||||
Магнитная |
энергия одного |
электромагнита |
обобщенные механические силы, действую¬ |
|||||||
является функцией электрического тока в ка¬ щие на входе во второй ярус виброзащитной
тушке и рабочего зазора между стопом и по¬ системы, Е - сторонние э.д.с., действующие |
|||||||||||||||||||||||||||||
верхностью сердечника. |
|
|
|
|
|
|
|
на электромагнитную систему. |
|
|
|
|
|||||||||||||||||
Для нижней катушки |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
Полагая, что Q1 — Q2 — 0, запишем систе¬ |
||||||||||||||||||||
|
|
P d \ 2 |
+ 0,75d - 0 1 5 7 1 1 ( 1 |
|
|
|
|||||||||||||||||||||||
|
|
3 ) |
му |
дифференциальных |
|
уравнений, |
описы¬ |
||||||||||||||||||||||
|
4(5-A2)sin |
a |
|
sin a |
I |
|
|
||||||||||||||||||||||
|
|
|
вающих процессы, происходящие в рассмат¬ |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
здесь w — количество витков в катушке |
риваемой электромеханической системе |
|
|||||||||||||||||||||||||||
индуктивности. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
- 1 ( х |
- y)2(2Сl(x - y) + 3 c 0 ) - |
|
|
||||||||||
Для верхней катушки |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
^ |
+ |
0,75d- |
^ |
] . |
( 1 |
4 |
) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
4(5 + A2)sin2 a |
|
|
sin2 |
a J |
|
|
|
1 2 |
( х2 |
- |
х 1 ) 2 ( 3 Ь |
2 |
( х |
2 |
|
- |
х 1 ) 2 |
+ |
|
(19) |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Тогда магнитная энергия одного замкнуто¬ |
|
+ |
|
4 Ь 1 |
( |
х 2 |
- + |
6 b 0 ) |
|
|
+ |
|
|
|
|
|
|||||||||||||
го контура, содержащего два электромагнита, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
расположенных встречно, |
соосно |
и |
имеющих |
|
+ 2w2m0 |
|
|
|
- |
х 1 ) |
|
|
i2- |
|
|
|
|||||||||||||
общий сердечник, будет равна |
|
|
|
|
|
|
|
|
|
|
°sm |
2 a ( 5 2 - (х2 - х1)2)2 |
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
W K — W h + W B — |
|
|
|
|
|
|
- |
к 1 |
( |
^ |
1 |
- y ) 2 + к 2 |
( х 2 - х = 0 , |
|
|
|
|||||||||||||
( |
|
pd 5 |
|
|
|
71 |
|
iA (15) |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
= w2 m0d |
|
+ 1 , 5 |
- |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
М |
2 Х 2 |
+Т(Х1 |
- |
У) |
|
( 2 С 1 ( Х 1 |
- |
У ) |
+ |
3 С |
0 ) |
+ |
|
|
|
||||||||
2sin |
2 a(52 - A22) |
sin2 |
a |
|
|
|
|
|
6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Магнитная энергия системы, состоящей из |
+ — (x2 |
- x1 |
)2(3b2(x2 - x1)2 + 4b1(x2 - x1) + 6b0 + |
|
|||||||||||||||||||||||||
двух замкнутых контуров, |
равна |
|
|
|
|
|
12 ' |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
pd2S(x2 - x1) |
|
|
|
|||||||||||||
|
Wm — 2 WK = |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i2 = 0, |
|||||||||||||
|
|
|
|
|
|
+ к2(x2 - x |
1 ) |
2 - 2 w 2 ^ 0 . 2 |
, g |
2 |
|
; |
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
pd 5 |
|
|
|
|
p |
|
|
|
|
|
|
|
|
sin2 a(S |
|
|
- (x2 |
- x1)2)2 |
|
|
|||||||
|
2sin2 a (52 |
•A222 >) |
+1,5 |
- sin2 |
|
2w2|m0dr |
2sin2 |
pd 5 |
|
|
|
|
|
,+ 1,, 5 + |
p |
a |
dt |
||||||||||||
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
a(52 - (х2 - х1)2) |
|
|
sin2 |
||||||||||
|
|
|
|
|
|
|
|
|
|
(16) |
|
|
|
|
|
|
|
pd(x2 - х1) |
|
|
|
|
|
|
|
|
|||
Лагранжиан равен |
|
|
|
|
|
|
|
- 2w2m |
|
|
|
|
г.Ахг |
- ^ ) + Ri = E. |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 sin2 a(52 - (х2 |
- х1)2) |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Выражение |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2wV, |
|
P d ( x 2 |
- х |
1 |
) |
|
i ( X |
2 - |
х 1 |
) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 sin2 a ( 5 2 |
- (х2 |
х 1 ) 2 ) 2 |
|
|
|
||||||
Вестник СибАДИ, выпуск 1 (19), 2011 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
53 |
||||||||||
PDF created with pdfFactory Pro trial version www. pdffactory. com
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И СИСТЕМЫ АВТОМАТИЗАЦИИ ПРОЕКТИРОВАНИЯ
представляет собой э.д.с. индукции, созда |
|
Библиографический список |
|
|||||||||||
ваемой |
движением якоря в |
магнитном |
поле |
1. |
Лурье А. И., |
Ходжаев К.Ш. Уравнения Ла- |
||||||||
электромагнитов. |
|
|
|
|
|
|||||||||
|
|
|
|
|
гранжа-Максвелла в курсе теоретической механи |
|||||||||
Выражение |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
ки. - В кн.: Сборник научно-методических статей по |
||||||||
|
|
|
|
|
|
|
|
|
||||||
|
|
|
p d 2 5 ( x 2 - X j ) |
•i2 |
|
теоретической механике. Вып.6. - М.: Высшая шко |
||||||||
|
± 2 w |
V |
о |
|
|
|
|
ла, 1976. - С.72-81. |
|
|
||||
|
|
|
sin2 a ( 5 2 - (x2 |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
2. |
Ходжаев К.Ш. Вибрация в технике. Т2. Ко |
||||
- пондеромоторную силу |
- |
силу притяже лебания нелинейных электромеханических систем. |
||||||||||||
ния, действующую на якорь под |
действием - М.: Высшая школа, 1979. |
|
||||||||||||
электромагнитов. |
|
|
|
|
|
3. Победря Б.Е. Диссипация энергии в теории |
||||||||
Выражение |
|
|
|
|
|
|
вязкоупругости. Вестник МГУ. Сер. Математика и |
|||||||
|
|
|
|
|
|
механика. 2003. № 4. С. 35-46 |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|||||
|
( |
|
pd |
5 |
|
•+1,5 + • p |
|
4. |
Буль О. Б. Методы расчета магнитных сис |
|||||
w2 m 0d |
|
|
a |
тем электрических аппаратов/ О. Б. Буль. М.: Ака |
||||||||||
|
2sin2 a ( 5 2 |
- (x2 - x1)2) |
sin2 |
демия, 2005. |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
представляет |
|
собой |
индуктивность |
двух |
пар |
5. |
Левченко Н.Л. Применение низкочастотных |
|||||||
соленоидов, |
которая |
является |
функцией |
от |
амортизаторов на базе резинокордных оболочек в |
|||||||||
перемещения |
якоря |
относительно |
обмоток |
системе виброзащиты рабочего места машиниста: |
||||||||||
Тезисы |
докладов |
на |
межвузовскую |
научно- |
||||||||||
электромагнитов (х1-х2). |
|
|
|
|
||||||||||
|
|
|
|
практическую конференцию. - Омск: Филиал ГОУ |
||||||||||
При |
составлении |
математической модели |
||||||||||||
ВО в г. Омске, 2007. |
|
|
||||||||||||
приняты следующие допущения: |
|
|
|
|
|
|||||||||
|
|
|
6. |
Левченко |
Н.Л. |
Математическая |
модель |
|||||||
1.Предполагается, что связи в системе виброзащитного устройства на базе резинокордных
стационарные и голономные.
2.Магнитным полем проводников пре¬ небрегаем, учитывая при введении функции энергии магнитного поля магнитные поля только катушек индуктивности.
3.Пренебрегаем энергией в материале магнитопровода и энергией в поле потока рассеяния, считая магнитное поле соленоида однородным и сосредоточенным внутри соле¬ ноида.
4.Не учитываем гистерезисные потери на перемагничивание якоря, считая, что век¬ тор B - индуктивность и H - напряженность магнитного поля направлены по одной пря¬ мой, и существующая между ними зависи¬ мость однозначна. Такая зависимость имеет место для большенства технических ферромагнитов при обычно встречающейся частоте изменения поля.
Разработанная математическая модель виброзащитного устройства позволяет изу¬ чить динамику работы узлов и механизмов исследуемого устройства, а также всей конст¬ рукции в целом, определить собственные час¬ тоты колебаний виброзащитного устройства, зоны резонанса, дать рекомендации по гра¬ ничным значениям использования данного устройства в системах виброизоляции [5,6].
оболочек: Сборник научных статей - Омск: Филиал ГОУ ВО в г. Омске, 2008. - С. 150-154.
The mathematical model of vehicle antivibration device with the electromagnetic stiff
ness compensator
V.S. Scherbakov, N.L. Levchenko
The article is devoted to of the mathematical model of vehicle antivibration device. Antivibration device is having two tiers. It is based on rubber balloons. The electromagnetic device to cruelty compensation is presented.
Щербаков Виталий Сергеевич - д-р техн. наук,
профессор, |
декан факультета «Нефтегазовая и |
строительная |
техника» Сибирской государствен |
ной автомобильно-дорожной академии. Основное |
|
направление научных исследований - проектиро
вание |
систем управления |
строительных и |
дорож |
||||
ных машин. |
Имеет |
более |
260 |
опубликованных ра |
|||
бот. |
E-mail: |
sherbakov vs@sibadil.oro |
|
|
|||
Левченко Наталья Львовна - старший препо |
|||||||
даватель |
кафедры |
«Технологии |
промышленно |
||||
сти» |
Российского |
заочного |
института |
тек |
|||
стильной и |
легкой |
промышленности» |
|
Филиала |
|||
ГОУ ВПО «РосЗИТЛП» в г. |
Омске. |
Основное на¬ |
|||||
правление |
научных |
исследований - |
математиче¬ |
||||
ское моделирование. Имеет 14 опубликованных работ.
Е- mail: Nataly Levchenko@mail.ru
54 |
Вестник СибАДИ, выпуск 1 (19), 2011 |
PDF created with pdfFactory Pro trial version www. pdffactory. com
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И СИСТЕМЫ АВТОМАТИЗАЦИИ ПРОЕКТИРОВАНИЯ
УДК 681.533: 621.226 + 625.75
АЛГОРИТМ И НЕКОТОРЫЕ РЕЗУЛЬТАТЫ РАСЧЕТА ОСНОВНЫХ ПАРАМЕТРОВ РАБОЧЕГО ОРГАНА ДЛЯ РАЗРУШЕНИЯ ГРУНТА
В.Н. Галдин
|
Аннотация. Алгоритм и программное обеспечение являются основой проектиро |
|
||||||||||||||||||||||||||||||||
вания |
активных |
рабочих |
|
органов |
дорожно-строительных |
машин, |
|
предназначенных |
|
|
||||||||||||||||||||||||
для разрушения прочных и мерзлых грунтов. |
Приведены |
некоторые |
результаты |
рас |
|
|||||||||||||||||||||||||||||
чета основных параметров (энергии единичного |
удара, |
массы |
бойка) |
рабочего |
|
органа |
|
|||||||||||||||||||||||||||
для |
разрушения |
грунта. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
Ключевые |
слова: |
активный |
рабочий |
орган, |
|
основные |
|
параметры, |
разрушение |
|
|||||||||||||||||||||||
грунта. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Введение |
|
|
|
|
|
|
|
|
|
|
|
|
(числом С), который дает интегральную |
|||||||||||||||||||||
Активизация рабочих органов путем при¬ |
оценку прочности грунта, и временным со¬ |
|||||||||||||||||||||||||||||||||
ложения различного рода импульсных на¬ |
противлением грунта одноосному сжатию |
О0 |
||||||||||||||||||||||||||||||||
грузок обеспечивает создание высоких ди¬ |
(МПа) [3]: |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
намических |
усилий, |
достаточных |
|
для |
|
эф¬ |
|
|
|
|
|
00 |
» C/30. |
|
|
|
|
|
|
(1) |
||||||||||||||
фективной |
|
разработки |
среды |
|
(мерзлого |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
грунта, |
разрушения |
|
негабаритов, |
асфальто¬ |
|
Показано |
также, |
что |
|
грунты |
плохо |
со¬ |
||||||||||||||||||||||
бетонных покрытий) [4]. |
|
|
|
|
|
|
|
|
противляются разрыву и имеет место связь |
|||||||||||||||||||||||||
Для |
разрушения |
мерзлых, |
|
прочных, |
|
|
|
|
|
Ор » 0,2 00. |
|
|
|
|
|
(2) |
||||||||||||||||||
скальных грунтов, бетонных оснований и |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
дорожных покрытий, |
в том числе в стеснен¬ |
|
Между |
числом |
ударов |
плотномера Дор- |
||||||||||||||||||||||||||||
ных |
местах, |
в условиях городской застрой¬ |
|
|||||||||||||||||||||||||||||||
НИИ |
С и удельным сцеплением |
С0 имеется |
||||||||||||||||||||||||||||||||
ки, |
а также |
|
при реконструкции |
различных |
||||||||||||||||||||||||||||||
|
корреляционная |
|
связь, |
также |
полученная |
|||||||||||||||||||||||||||||
производственных |
объектов |
рекомендуется |
|
|||||||||||||||||||||||||||||||
И.А.Недорезовым [3]: |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
применять навесные гидравлические и гид¬ |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
С0 = 0,008C. |
|
|
|
|
(3) |
||||||||||||||||||||||||
ропневматические |
молоты |
|
к экскаваторам |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
II...V |
размерных |
групп. |
|
|
|
|
|
|
|
|
|
Условия разрушения мерзлых и прочных |
||||||||||||||||||||||
Расчет активного рабочего органа |
|
|
||||||||||||||||||||||||||||||||
|
грунтов |
можно |
записать |
следующим |
обра¬ |
|||||||||||||||||||||||||||||
Прочность |
грунтов характеризуется |
спо¬ |
||||||||||||||||||||||||||||||||
зом: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
собностью |
сопротивляться |
|
внешним |
сило¬ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
вым воздействиям. Прочностные показатели |
|
|
|
|
О > |
00 |
> |
С0 |
> |
Ор , |
|
|
|
(4) |
||||||||||||||||||||
грунтов |
могут быть |
определены |
с помощью |
|
где |
О - |
напряжение, |
возникающее |
на |
|||||||||||||||||||||||||
временного сопротивления одноосному сжа¬ |
|
|||||||||||||||||||||||||||||||||
поверхности |
грунта; |
О0 |
- временное |
сопро |
||||||||||||||||||||||||||||||
тию |
О0 |
и |
разрыву ор, удельного сцепления |
|||||||||||||||||||||||||||||||
тивление |
одноосному |
сжатию; |
С0 - |
удель |
||||||||||||||||||||||||||||||
С0 и с помощью числа |
С |
ударов плотноме |
||||||||||||||||||||||||||||||||
ное сцепление; |
|
ор |
- |
временное |
сопротив¬ |
|||||||||||||||||||||||||||||
ра ДорНИИ . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
ление |
разрыву. |
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Косвенной |
характеристикой |
|
прочности |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
Уравнение (4) |
означает, |
что для |
эффек¬ |
|||||||||||||||||||||||||||||
грунта является |
число |
ударов |
плотномера |
|
||||||||||||||||||||||||||||||
тивного |
разрушения |
грунтов |
необходимо |
|||||||||||||||||||||||||||||||
ДорНИИ |
|
С |
|
- |
работа, |
затрачиваемая |
для |
|||||||||||||||||||||||||||
|
|
применять такие способы, при которых пре¬ |
||||||||||||||||||||||||||||||||
погружения |
в |
грунт |
|
на |
глубину |
10см |
нако¬ |
|||||||||||||||||||||||||||
|
обладают напряжения |
разрыва. |
|
|
|
|
||||||||||||||||||||||||||||
нечника |
с |
площадью |
основания, |
равной |
1 |
|
|
|
|
|||||||||||||||||||||||||
|
Классификация |
немерзлых |
и |
мерзлых |
||||||||||||||||||||||||||||||
см2 . Число ударов уточняет |
классификацию |
|
||||||||||||||||||||||||||||||||
грунтов по трудности разработки. |
|
|
|
|
грунтов |
(по |
ГОСТ 30067-93), |
в зависимости |
||||||||||||||||||||||||||
|
|
|
|
от числа ударов динамического |
плотномера |
|||||||||||||||||||||||||||||
Профессором |
И.А.Недорезовым |
уста¬ |
||||||||||||||||||||||||||||||||
ДорНИИ, приведена в таблице. |
|
|
|
|
||||||||||||||||||||||||||||||
новлена достаточно тесная линейная связь |
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
между |
показаниями |
плотномера |
|
ДорНИИ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
Вестник СибАДИ, выпуск 1 (19), 2011 |
55 |
PDF created with pdfFactory Pro trial version www. pdffactory. com
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И СИСТЕМЫ АВТОМАТИЗАЦИИ ПРОЕКТИРОВАНИЯ
|
Таблица 1 - Классификация грунтов |
|
|
|
|
|
|
|
I |
|
|
|
E(i - m) |
~ |
|
|
|
(6) |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и, = |
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
Категория |
|
Число |
|
|
Примечание |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
грунта |
|
ударов |
С |
|
|
|
|
|
|
где Е - модуль |
|
нормальной упругости |
грунта; |
|||||||||||||||||||||
|
|
I |
|
|
|
1...4 |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
m - коэффициент поперечной упругости |
|
грун¬ |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
Немерзлые |
|
|
||||||||||||||||||||||
|
|
II |
|
|
|
5...8 |
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
та; р - плотность |
грунта. |
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
грунты |
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
III |
|
|
|
9...16 |
|
|
|
|
|
Для |
определения основных |
|
параметров |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
IV |
|
|
|
17...35 |
|
|
|
|
|
|
рабочего органа ударного действия (требуе¬ |
||||||||||||||||||||||
|
|
V |
|
|
|
36...70 |
|
|
|
|
|
|
мой для разрушения |
|
грунта |
энергии удара AP |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
Мерзлые |
|
глубины внедрения инструмента |
5вн , |
време¬ |
||||||||||||||||||||||
|
|
VI |
|
|
|
71...140 |
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
грунты |
|
ни соударения |
|
инструмента |
с грунтом |
- |
вре¬ |
|||||||||||||||
|
|
VII |
|
|
|
141...280 |
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
мени удара |
tyd |
|
, |
силы сопротивления |
грунта |
|||||||||||||||||||
|
|
VIII |
|
|
281...560 |
|
|
|
|
|
|
разрушению |
Nc |
|
) |
применяются |
следующие |
||||||||||||||||||
|
При |
определении |
энергии, |
необходимой |
формулы [2]: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
для разрушения грунта, принимаются сле |
энергия удара |
Л |
|
=-вН |
|
|
|
1—S-C2 ; |
|
(7) |
|||||||||||||||||||||||||
|
|
|
|
|
|||||||||||||||||||||||||||||||
дующие допущения: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Р |
|
|
2V,kaE |
|
|
|
|
|||||||||||
|
- вся кинетическая энергия бойка гидро |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
молота передается инструменту; |
|
|
|
|
глубина внедрения |
d |
— р |
1 |
a 2 |
; |
(8) |
||||||||||||||||||||||||
|
- энергия, отраженная от грунта в инстру¬ |
|
|
|
|
|
|
|
|
|
|
|
|
SU1kSC2 |
|
|
|||||||||||||||||||
мент, |
не учитывается; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
2Лт ka E |
|
|
|||||||||||
|
- тепловые потери в грунте не учитываются; |
|
|
время удара |
|
tуд |
|
|
(9) |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
- потенциальная энергия упругого дефор¬ |
|
|
|
|
SU1kSC |
|
2 |
|
||||||||||||||||||||||||||
мирования |
переходит |
в |
энергию |
трещинооб- |
где S - площадь контакта инструмента с грун¬ |
||||||||||||||||||||||||||||||
разования |
скалываемого тела. |
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
том; |
Ui |
- скорость |
распространения продоль¬ |
||||||||||||||||||||||||||||
|
При |
таких |
допущениях |
энергия, затрачи¬ |
|||||||||||||||||||||||||||||||
|
ной |
волны; |
E - динамический мо дуль упруго |
||||||||||||||||||||||||||||||||
ваемая |
на |
разрушение грунта, |
определяется |
||||||||||||||||||||||||||||||||
сти |
грунта; |
ka |
|
- |
безразмерный коэффициент, |
||||||||||||||||||||||||||||||
по формуле [1]: |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
учитывающий |
|
угол |
|
заострения |
инструмента, |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
Лр |
|
= |
Vp |
j |
s (e )de |
|
|
|
|
ka > |
1,0; |
V1 |
- |
скорость удара |
инструмента |
||||||||||||||||
|
|
|
|
|
|
|
(5) |
(бойка) |
о грунт; |
kS |
- коэффициент, |
kS = k02kC2km |
|||||||||||||||||||||||
|
|
|
|
|
|
|
о |
|
|
|
|
|
|
|
|
, здесь k0 - безразмерный коэффициент, k0 = |
|||||||||||||||||||
|
где |
AP |
- энергия |
разрушения |
грунта; VP - |
1,36...1,60; kc |
|
- |
коэффициент, предложенный |
||||||||||||||||||||||||||
объем |
разрушенной |
зоны, |
|
VP |
= |
SL, |
L=(U1- |
проф. И.А.Недорезовым, kc = 106/30; km - без |
|||||||||||||||||||||||||||
Vi)tyd, |
здесь S - площадь контакта инструмен¬ |
размерный коэффициент, km = 1-2/j/(1-m), |
|||||||||||||||||||||||||||||||||
та с разрушаемым грунтом; L - длина сжатой |
здесь m - коэффициент поперечной упругости |
||||||||||||||||||||||||||||||||||
зоны; U1 - скорость распространения про |
грунта (Пуассона); C - число ударов плотно¬ |
||||||||||||||||||||||||||||||||||
дольной |
волны; |
V1 |
- скорость |
удара |
инстру |
мера ДорНИИ. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
мента о грунт; |
tyd |
- время удара; а(е) |
- напря |
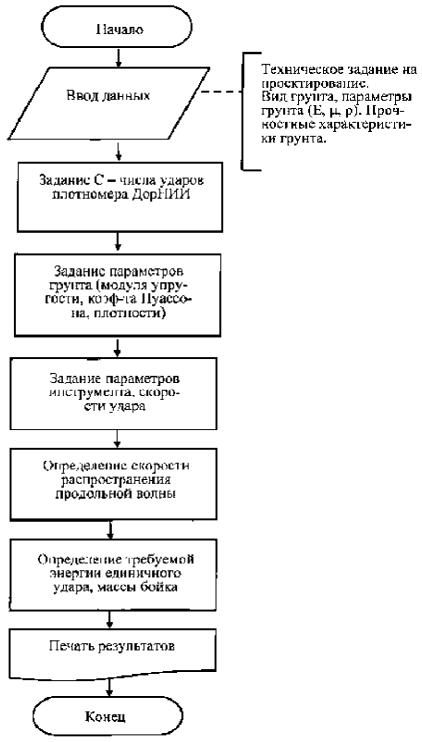
Алгоритм |
|
расчета |
активного |
рабочего |
|||||||||||||||||||||||||||
жение на поверхности грунта; г - деформация |
|
||||||||||||||||||||||||||||||||||
органа |
для |
разрушения |
грунта |
представлен |
|||||||||||||||||||||||||||||||
грунта. |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
на рис. 1. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
Скорость |
распространения |
|
продольных |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
упругих волн равна [5]:
56
PDF created with pdfFactory Pro trial version www. pdffactory. com
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И СИСТЕМЫ АВТОМАТИЗАЦИИ ПРОЕКТИРОВАНИЯ
Рис. 1. Алгоритм расчета активного рабочего органа
Вестник СибАДИ, выпуск 1 (19), 2011 |
57 |
PDF created with pdfFactory Pro trial version www. pdffactory. com

МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И СИСТЕМЫ АВТОМАТИЗАЦИИ ПРОЕКТИРОВАНИЯ
По |
формуле |
(7) |
находится требуемая |
|
2T_ |
|
(11) |
||
энергия единичного удара гидромолота Т, не¬ |
|
m = |
|
||||||
|
|
|
|||||||
обходимая для внедрения инструмента на |
Программное |
обеспечение |
расчета |
актив¬ |
|||||
глубину |
h при заданной скорости удара |
V1 , |
|||||||
т. е. |
|
|
|
|
|
ного рабочего органа для разрушения грунта |
|||
|
|
hSU,ks |
C2 |
|
разработано на языке программирования VBA |
||||
|
T |
(10) |
для персональных компьютеров. |
|
|||||
|
|
|
|
|
|||||
|
|
2V,kaE |
. |
|
Фрагменты |
результатов |
расчетов |
пара¬ |
|
Определив энергию |
единичного удара Т |
метров активного рабочего органа показаны |
|||||||
по формуле (10), |
находят |
массу бойка |
m из |
на рис. 2, 3. |
|
|
|
||
|
|
|
|
||||||
выражения
Рис. 2. Фрагмент расчета параметров активного рабочего органа
|
|
|
|
'li UUMIU |
|
П LfLUJ-при rp-гь TJ. |
|
||
Чн |
ил у ? ц к * И |
?нО-ди-:рлтй.Л1 Е Л1П* |
O i № ! T i n t . |
|
|
||||
TLlLLHL'-.L. JJ|ih IJ |
EUj .• ф-ф Н ЩICUI |
|
||
ни |
j |
I U.2 |
Пу-ысэн-а e ^ h i a |
|
J |
lyfJ |
|
|
|
r v p i U h I ! W
Рис. 3. Рабочее окно определения параметров активного рабочего органа (мерзлый грунт, С=250)
58 |
Вестник СибАДИ, выпуск 1 (19), 2011 |
PDF created with pdfFactory Pro trial version www. pdffactory. com
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И СИСТЕМЫ АВТОМАТИЗАЦИИ ПРОЕКТИРОВАНИЯ
Выводы
Разработан алгоритм и составлена програм¬ ма, позволяющая определять основные пара¬ метры активного рабочего органа при разруше¬ нии грунтов: требуемую энергию единичного удара, массу бойка, глубину внедрения инстру¬ мента в грунт при разрушении мерзлого и проч¬ ного грунта.
Библиографический список
1. Ветров Ю.А., Баладинский В.Л. Машины для специальных земляных работ / Ю.А.Ветров, В.Л. Баладинский. - Киев: Вища школа, 1981. - 192 с.
2.Галдин Н.С. Многоцелевые гидроударные рабо чие органы дорожно-строительных машин: Моногра фия / Н. С. Галдин. - Омск: Изд-во СибАДИ, 2005. - 223 с.
3.Недорезов И.А. Интенсификация рабочих орга нов землеройных машин / И. А. Недорезов. - М.: М А Д И , 1979.- 51 с.
4.Теоретические основы создания гидроимпульс¬ ных систем ударных органов машин /А.С.Сагинов, ИАЯнцен, Д.Н. Ешуткин, Г.Г.Пивень. Алма-Ата: Наука, 1985. - 256 с.
5.Цытович Н.А. Механика грунтов / Н.А.Цытович. - М.: Высш. школа, 1979. - 272 с..
УДК 004.021 : 621.9.02
Algorithm and some results of calculation of key parameters of working body for
destruction of a ground
V.N.Galdin
The algorithm and the software are a basis of designing of active working bodies of the roadbuilding machines intended for destruction strong and frozen grounds. Some results of calculation of key parameters (energy of individual impact, weights it is brisk) working body for destruction of a ground are resulted.
Галдин Владимир Николаевич - инженер, соиска тель Сибирской государственной автомобильнодорожной академии. Основное направление научных исследований - автоматизированное проектирова ние систем. Имеет 25 опубликованных работ.
АВТОМАТИЗИРОВАННЫЙ СПОСОБ ОЦЕНКИ ВЗАИМНОГОПОЛОЖЕНИЯ ФРАГМЕНТОВ ИЗОБРАЖЕНИЙ НА ЧЕРТЕЖАХ МЕТАЛЛОРЕЖУЩЕГО ИНСТРУМЕНТА
Ф. Н. Притыкин, Е. Е. Шмуленкова
Аннотация. |
В статье рассматривается автоматизированный способ определе |
||
ния взаимного |
расположения |
объектов на чертеже металлорежущего инструмента. |
|
При этом чертеж создан на основе параметрической 3-D модели. Для анализа гео |
|||
метрических объектов применяется теория множеств. |
|||
Ключевые |
слова: чертеж металлорежущего |
инструмента, теория множеств, |
|
автоматизированный способ |
оценки графических |
объектов. |
|
В настоящее время для создания различных графических баз данных, например, чертежей режущих инструментов, используются парамет¬ рические 3-D модели созданные в T-flex. Это связано с тем, что в данной системе, возможно, осуществлять расчеты, создавать внутренние базы данных и что самое важное проектировать
сложные параметрические модели и на основе их создавать изображения видов, разрезов и др. Пример такой модели приведен на рисунке 1. Если чертеж создан на основе параметрической 3-D модели, то при изменении исходных данных модели происходит автоматическое преобразо¬ вание изображений на чертеже.
Вестник СибАДИ, выпуск 1 (19), 2011 |
59 |
PDF created with pdfFactory Pro trial version www. pdffactory. com

МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И СИСТЕМЫ АВТОМАТИЗАЦИИ ПРОЕКТИРОВАНИЯ
крепежная часть резца (державка)
передняя
поверхность
вспомогательная режущая кромка
вспомогательная задняя поверхность
Рис. 1. Параметрическое изображение 3-D модели режущего инструмента, выполненное в T-flex
Однако при создании указанных чертежей с использованием программы T-flex возникает проблема, связанная с тем, что после преобра зования на чертеже произойдет наложение фрагментов изображений друг на друга. Как пра вило, при этом пользователь редактирует дан ный чертеж вручную. В связи с этим предлагает ся использовать систему AutoCAD, которая по¬ зволит редактировать полученный чертеж в про¬ грамме T-flex автоматизированным способом. Для редактирования чертежа разработано про¬ граммное обеспечение, созданное на языке про¬ граммирования AutoLISP [1]. Оно позволяет про¬ водить автоматизированный анализ взаимного положения фрагментов изображений режущего инструмента с помощью определения границ зон видов и сечений на основе функций доступа к примитивам. Для того чтобы осуществить авто¬ матическую коррекцию положения фрагментов изображений необходимо выделить объект из чертежа. Например, выделить область, в кото¬ рую входят изображения сечения и его размеры (или виды и его размеры и т.д.), а также опреде¬ лить принадлежность графических примитивов данной области. Для этого разработаны специ¬ альные функции-подпрограммы, позволяющих получать информацию о графических объектах, и их взаимном положении [2]. При этом исполь¬ зуется теория множеств.
При оценке чертежа и определении его зон, необходимо, использовать прямоугольную об¬ ласть. Для задания прямоугольной области вос¬ пользуемся R-функцией, а именно R- конъюнкцией. Данная функция определяется следующей формулой [3]:
Y^ — X i л X 2 = X i + X 2 -4х I 2 + X |
(1) |
Прямоугольная область определяется нера¬ венствами ш1 > 0 и ш2 > 0 соответственно. Так как рассматриваемая область Q1 является прямо¬ угольной, выведем для нее неравенство. Пусть
область |
Q1 |
есть |
вертикальная |
поло |
са щ ° d2 |
- x2 > 0 , а Q2 |
- горизонтальная полоса |
||
со2 ° b |
> 0 (рисунок 2а.). |
|
||
Ч
л-
Рис. 2. Геометрические параметры, задающие фрагменты изображений
а) прямоугольная область; б) объединения областей.
Тогда воспользовавшись R-конъюнкцией (1) находим неравенство, которое определяет пря¬ моугольную область A1A2A3A4 [3].
(d2 - X j 2 ) л ( b ь -y2) > 0 . |
(2) |
Уравнение прямоугольника получаем в виде:
(d2 - Xj2) л (b1 - y2 ) — 0 . |
|
(3) |
|||
|
|
|
|
|
или |
°d2 + b1 -xJ-y2 -J(d2 -x2 )2 +(b |
y |
j 2 ) |
2 = |
= |
0 . (4) |
|
|
- |
|||
Далее выведем уравнение область Qi (рису¬ нок 2б.), которая представляет собой объедине¬ ние областей Q1 и Q2, Q1 = Q1 и Q2. Для нахож¬ дения границ области Qi используем операцию R-дизъюнкции, в качестве которой можно ис¬ пользовать следующую зависимость:
60 |
Вестник СибАДИ, выпуск 1 (19), 2011 |
PDF created with pdfFactory Pro trial version www. pdffactory. com