

1643
.pdfНа правах рукописи
ДЕНИСОВА ЕКАТЕРИНА ФЕДОРОВНА
СИСТЕМА АВТОМАТИЗАЦИИ ПРОЕКТИРОВАНИЯ ОСНОВНЫХ ПАРАМЕТРОВ УСТРОЙСТВА УПРАВЛЕНИЯ ПОГРУЖЕНИЕМ ВИНТОВОЙ СВАИ
Специальности
05.13.12– Системы автоматизации проектирования (промышленность)
05.05.04– Дорожные, строительные и подъемно-транспортные машины
АВТОРЕФЕРАТ диссертации на соискание ученой степени
кандидата технических наук
Омск – 2011

Работа выполнена в Государственном образовательном учреждении высшего профессионального образования «Сибирская государственная автомобильно-дорожная академия (СибАДИ)»
Научный руководитель: доктор технических наук, профессор Щербаков Виталий Сергеевич
Официальные оппоненты: доктор технических наук, профессор Галдин Николай Семенович
доктор технических наук, доцент Мещеряков Виталий Александрович
Ведущая организация: Государственное образовательное учреждение высшего профессионального образования «Омский государственный университет путей сообщения»
Защита диссертации состоится 17 июня 2011 г. в 1400 ч. на заседании объединенного диссертационного совета ДМ 212.250.03 при Государственном образовательном учреждении высшего профессионального образования «Сибирская государственная автомобильно-дорожная академия» по адресу: 644080, г. Омск, пр. Мира, 5, зал заседаний.
С диссертацией можно ознакомиться в библиотеке Государственного образовательного учреждения высшего профессионального образования «Сибирская государственная автомобильно-дорожная академия».
Отзывы на автореферат направлять по адресу: 644080, г. Омск,
пр. Мира 5, тел., факс: (3812) 65-03-23, e-mail: Arkhipenko_m@sibadi.org
Автореферат разослан 17 мая 2011 г.
Ученый секретарь объединенного |
|
диссертационного совета ДМ 212.250.03, |
|
кандидат технических наук |
М.Ю. Архипенко |
ОБЩАЯ ХАРАКТЕРИСТИКА РАБОТЫ
Актуальность работы. В настоящее время значительное внимание уделяется проблемам создания и повышения эффективности систем автоматизации проектирования (САПР). Проектирование сложных динамических систем, таких как устройство управления погружением винтовой сваи, с большим количеством параметров, влияющих на процесс погружения, невозможно осуществлять без использования современных компьютерных методов. Применение САПР позволит сократить сроки создания и ввода в эксплуатацию образцов новой и модернизацию существующей техники, существенно снизить затраты на стадии разработки изделия.
До настоящего времени не было разработано САПР основных параметров устройства управления погружением винтовой сваи. Таким образом, проблема разработки САПР основных параметров устройства управления погружением винтовой сваи на основе широкого использования средств вычислительной техники является весьма актуальной.
В разработанной САПР оптимизация параметров устройства управления погружением винтовой сваи происходит в соответствии с алгоритмом работы САПР, современное программное обеспечение делает возможным диалог проектировщика и электронно-вычислительной машины в процессе проектирования.
Объект исследований – процесс автоматизации проектирования основных параметров устройства управления погружением винтовой сваи.
Предмет исследований – закономерности процесса автоматизации проектирования основных параметров устройства управления погружением винтовой сваи.
Цель диссертационной работы – совершенствование процесса проектирования основных параметров устройства управления погружением винтовой сваи за счет автоматизации расчетов их оптимальных значений.
Задачи исследований:
1)выбор и обоснование критерия эффективности устройства управления погружением винтовой сваи;
2)разработка математической модели процесса погружения винтовой
сваи;
3)автоматизация процессов анализа и синтеза основных параметров устройства управления погружением винтовой сваи;
4)разработка инженерной методики и алгоритма работы системы автоматизации проектирования основных параметров устройства управления погружением винтовой сваи.
На защиту выносятся:
математическая модель процесса погружения винтовой сваи; 3
полученные функциональные зависимости, отражающие связь критерия эффективности и основных параметров устройства управления погружением винтовой сваи;
алгоритм работы САПР основных параметров устройства управления погружением винтовой сваи.
Практическая ценность работы:
инженерная методика «Выбор основных параметров устройства управления погружением винтовой сваи»;
САПР основных параметров устройства управления погружением винтовой сваи.
Апробация работы. Основные положения работы докладывались, обсуждались и получили одобрение на следующих конференциях: X, XI, XII Всероссийских научно-практических конференциях аспирантов, студентов и молодых исследователей «Теоретические знания – в практические дела» (г. Омск 2009 - 2011 гг. РосЗИТЛП); IV, V Всероссийских научнопрактических конференциях студентов, аспирантов и молодых ученых «Развитие дорожно-транспортного комплекса и строительной инфраструктуры на основе рационального природопользования» (г. Омск 2009-2010
гг. СибАДИ); 63-, 64-й научно-технических конференциях СибАДИ (г. Омск 2009-2010 гг. СибАДИ); Региональной научно-технической конференции молодых ученых, студентов, аспирантов «Новые технологии на транспорте, в энергетике и строительстве» (с международным участием), посвященной 90-летию Омского командного речного училища (г. Омск
2010 г. ОИВТ).
Реализация результатов работы. В ОАО «Конструкторское бюро транспортного машиностроения» г. Омска принята к внедрению САПР основных параметров устройства управления погружением винтовой сваи. В ОАО «Мостовое ремонтно-строительное управление» г. Омска принята к внедрению инженерная методика «Выбор основных параметров устройства управления погружением винтовой сваи».
Публикации. По материалам исследований опубликовано 9 печатных работ, в том числе 1 статья в издании, рекомендованном ВАК.
Структура и содержание работы. Диссертационная работа общим объемом 146 страниц состоит из введения, пяти глав, основных результатов и выводов, списка литературы и приложений.
СОДЕРЖАНИЕ РАБОТЫ Введение. Обосновывается актуальность темы, формулируется цель
исследования, излагаются основные положения, выносимые на защиту, и новые результаты, полученные в работе.
Первая глава. Представлен обзор САПР, проведен обзор и анализ оборудования для погружения винтовых свай, рассмотрены известные математические модели взаимодействия винтовой сваи с грунтом, составлена блок-схема процесса погружения. Сформулированы цель и задачи диссертационной работы, а так же объект и предмет исследований.
4
Обоснованы критерий эффективности устройства управления погружением винтовой сваи – время погружения сваи на заданную глубину tС; целевая функция – tС → min; ограничение – перерегулирование момента силы на валу двигателя не превышает определенного заданного
значения σМ ≤ σМ_ЗАД.
Вторая глава. Изложена общая методика теоретических и экспериментальных исследований. На основе методологии системного анализа выявлены основные этапы решения поставленных задач и определена структура работы.
Третья глава. Разработана математическая модель процесса погружения винтовой сваи, представленная совокупностью отдельных взаимодействующих между собой подсистем.
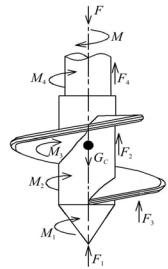
Было принято решение об использовании математической модели взаимодействия винтовой сваи с грунтом, разработанной и экспериментально подтвержденной Ю.Е. Пономаренко и Н.Б. Барановым. Расчетная схема для определения крутящего момента силы завинчивания сваи и вер-
тикальной силы представлена на рисунке 1. |
|
|||
|
|
|
Крутящий момент силы завинчивания |
|
|
|
|
сваи в грунт рассчитывается по формуле: |
|
|
|
|
M M1 M 2 M3 M 4 , |
(1) |
|
|
|
где М1, М2, М3, М4 – моменты сил сопро- |
|
|
|
|
тивления, возникающие при погружении |
|
|
|
|
конусного наконечника, башмака, винто- |
|
|
|
|
вой лопасти и обсадной трубы соответст- |
|
|
|
|
венно. |
|
|
|
|
Вертикальная сила: |
|
|
|
|
F F1 F2 F3 F4 GС , |
(2) |
|
|
|
где F1, F2, F3, F4 – вертикальные силы, необ- |
|
|
|
|
ходимые для погружения конусного нако- |
|
|
|
|
нечника, башмака, винтовой лопасти и об- |
|
|
|
|
садной трубы соответственно; GС – сила ве- |
|
Рисунок 1 – Расчетная схема для |
|
|
са сваи. |
|
определения крутящего момента |
|
|
Для математического описания меха- |
|
силы завинчивания сваи и |
|
|
низма погружения винтовой сваи была со- |
|
вертикальной силы |
|
|
ставлена расчетная схема, представленная |
|
|
|
|
на рисунке 2. |
|
Величина заглубления сваи HС определяется по формуле: |
|
|||
H C |
R |
|
t |
(3) |
|
Б Б dt LПр.МП , |
|||
|
2 |
0 |
|
|
где ωБ – угловая скорость вращения барабана 1; RБ – радиус барабана лебедки натяжного троса привода подачи; LПр.МП – перемещение блока 2, под действием деформации пружины 5; t – время погружения.
5

Для равномерного погружения винтовой сваи в грунт найдена зависимость между угловыми скоростями гидроприводов вращения – ωМ1 и подачи сваи – ωМ2:
М2 |
|
H |
Л |
|
М1 |
i |
МП2 |
2 |
i |
МП2 |
d LПр.МП |
, |
(4) |
|
|
|
|
|
dt |
||||||||
|
|
RБ iМП1 |
|
RБ |
|
|
|||||||
где HЛ – шаг лопасти винтовой сваи; iМП1 – передаточное отношение привода механизма погружения для контура вращения сваи; iМП2 – передаточное отношение привода механизма погружения для контура подачи сваи.
Моменты сил сопротивления, приложенные к гидромоторам вращения и подачи сваи ММ1 и ММ2, будут определяться из следующих зависимостей:
|
M M 1 |
|
M |
; |
|
(5) |
||
|
|
|
|
|||||
|
|
|
iМП1 |
|
||||
M М 2 |
|
FБ RБ |
|
F RБ |
, |
(6) |
||
|
|
|||||||
|
|
iМП2 |
|
|
2 iМП2 |
|
||
где FБ – сила натяжения троса. Математическая модель двигателя
внутреннего сгорания (ДВС) совместно с регулятором, представленная известными зависимостями, позволяющая моделировать его динамику с учетом изменяющегося момента силы сопротивления на валу двигателя, является подсистемой математической модели процесса погружения винтовой сваи.
Уравнения движения подсистемы двигатель – всережимный регулятор:
J Д Д МД ( Д ; z) МС;
МД ( Д ; z) МД(MIN ) ( Д ) МZ
z A(z) 2Д mz ТРz FН0 z zММ ,
k Д z; (7)
СПР.Р ;
где JД – приведенный момент инерции вала ДВС и связанных с ним агрегатов; МД – активный момент силы на валу двигателя; MC – суммарный момент приложенных к валу ДВС сил сопротивлений; ωД – угловая скорость вала двигателя; МД(MIN)(ωД) – момент силы двигателя при минимальной подаче топлива q0, соответствующей холостому ходу; kД – коэффициент
6
подачи; MZ – приращение момента силы при максимальной подаче топлива; z – перемещение муфты регулятора, отсчитываемое от положения максимальной подачи топлива; νТР – коэффициент вязкого трения вала регулятора; A(z) –поддерживающая сила; m – приведенная к муфте масса всех подвижных частей регулятора; FH –сила предварительного сжатия пружины, приведенная к муфте; СПР.Р – приведенная жесткость пружины регулятора.
На рисунке 3 представлена структурная схема математической модели ДВС, описывающая динамические свойства двигателя, оснащенного серийным всережимным регулятором угловой скорости типа РВ.
Рисунок 3 – Структурная схема математической модели двигателя внутреннего сгорания совместно с регулятором
Основные элементы, используемые в гидроприводах вращения и подачи сваи, в настоящее время достаточно хорошо изучены и математически описаны.
Математическая модель гидронасоса регулируемой подачи, структур-
ная схема которой представлена на рисунке 4, описана уравнениями: |
|
||||
M Н1 |
PН1 PА qН1 |
; |
(8) |
||
|
|
|
|||
|
2 МН1 |
|
|||
QН1 qН1 Н1 ОН1 / 2 ; |
(9) |
||||
qН1 qНМ1 eH1; |
(10) |
||||
Н1 |
Д |
, |
(11) |
||
|
|||||
|
|
iТР1 |
|
||
где QH1 – подача насоса; qHM1 – максимальный рабочий объем насоса; qH1 – текущий рабочий объем насоса; eH1 – параметр регулирования; ωH1 – угловая скорость вала насоса; MH1 – момент силы сопротивления на валу гидронасоса; PА, PH1 – давления соответственно на входе и выходе из насоса (PА принимается равным атмосферному давлению); ηOH1, ηMH1 – КПД насоса соответственно объемный и механический.
7

Параметр регулирования eH1 представлен функцией угла наклона
шайбы гидронасоса γшн1: |
γшн1 |
|
|
|
eH1 |
, |
(12) |
||
|
||||
|
γшн_ max1 |
|
||
где γшн_max1 – максимальный угол наклона шайбы гидронасоса.
Процесс перемещения шайбы гидронасоса с пропорциональным сле-
дящим сервоуправлением представлен уравнением: |
|
Тшн1 γшн1 KEK1 IEK1 I01 γшн1, |
(13) |
где KEK1 и I01 – коэффициент передачи и ток электромагнитного клапана; IEK1 – сила тока управляющего сигнала; Тшн1 – постоянная времени сервопривода.
Рисунок 4 – Структурная схема математической модели гидронасоса регулируемой подачи
Математическая модель гидромотора представлена уравнениями: |
(14) |
|||||
P 2 M М1 |
JМ1 |
М1 |
P ; |
|||
МН1 |
|
|
|
МС1 |
|
|
qМ1 |
ММ1 |
|
|
|
||
|
|
|
|
|
||
|
М1 2 QМС1 |
qM 1 ; |
|
(15) |
||
|
QMC1 QМН1 ОМ1 , |
|
(16) |
|||
где QМН1, QМС1 – расходы гидромотора; qМ1 –рабочий объем гидромотора; ωМ1 – угловая скорость вала гидромотора; JМ1 – момент инерции вращающихся масс, приведенный к валу гидромотора; MМ1 – крутящий момент силы на валу гидромотора; PMH1, PMC1 – давления соответственно на входе и выходе гидромотора; ηOМ1, ηMМ1 – КПД гидромотора соответственно объемный и механический.
Блок управления на основании показаний датчиков выдает управляющие сигналы IЕК1, IЕК2 на исполнительный гидропривод, обеспечивая оптимальную загрузку ДВС машины и синхронизацию вращательного и поступательного движения сваи.
Блок-схема алгоритма управления погружением винтовой сваи состоит из 2-х параллельных процессов и представлена на рисунке 5.
8

Рисунок 5 – Блок-схема алгоритма управления погружением винтовой сваи
Для первого контура управления сигнал рассогласования активного момента на валу ДВС MД будет:
MД = MД_ЗАД – MД_ИЗМ, |
(17) |
где MД_ИЗМ – измеренное значения момента силы на валу ДВС; MД_ЗАД – заданное оптимальное значение момента силы на валу ДВС.
Выходной управляющий сигнал IEK1 формируется в зависимости от
сигнала рассогласования моментов сил на валу ДВС |
MД: |
|||
dI |
EK1 M Д |
IEK _ max1 |
; |
(18) |
|
M Д _ ЗАД Тшн1 |
|||
dt |
|
|
||
|
0 IEK1 IEK _ max1. |
|
(19) |
|
Для второго контура управления сигнал рассогласования угловой ско- |
||||
рости гидромотора подачи сваи ωМ2: |
|
|
||
|
ωМ2 = ω2_ЗАД – ω2_ИЗМ, |
|
(20) |
|
где ω2_ЗАД и ω2_ИЗМ – заданное и измеренное значение угловой скорости гидропривода подачи сваи.
Значение ωМ2_ЗАД определяется по формуле (4):
М2 _ ЗАД KM М1_ ИЗМ KL |
d LПр.МП _ ИЗМ |
; |
(21) |
|
dt |
||||
|
|
|
9

|
K |
M |
|
HЛ iМП2 |
; |
|
(22) |
|||
|
|
|
||||||||
|
|
|
|
R |
i |
|
|
|
||
|
|
|
|
|
|
Б |
МП1 |
|
|
|
|
|
|
KL |
2 iМП2 . |
|
|
(23) |
|||
|
|
|
|
|
|
RБ |
|
|
|
|
Выходной управляющий сигнал IEK2 формируется в зависимости от сиг- |
||||||||||
наларассогласованияпоугловойскоростигидромотораподачисваи |
ωМ2: |
|||||||||
dI |
EK 2 |
|
M 2 IEK _ max1 |
; |
(24) |
|||||
|
|
|
2 |
|
||||||
dt |
|
|
|
|
|
|
|
|
||
|
0 IEK 2 IEK _ max 2 . |
|
(25) |
|||||||
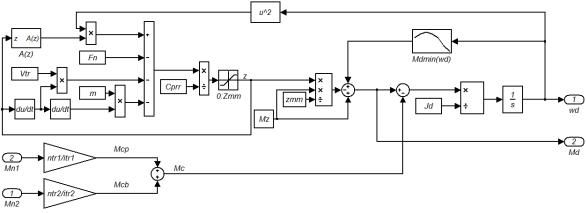
На основании вышеописанного в среде MATLAB-Simulink была составлена структурная схема математической модели блока управления погружением винтовой сваи (рисунок 6). Данная схема содержит блок остановки процесса моделирования при достижении сваей заданной глубины:
|
|
HC _ ИЗМ HС_ ЗАД . |
(26) |
|
Вычисление текущего значения глубины погружения сваи произво- |
||||
дится блоком управления согласно зависимости (3): |
|
|||
HC _ ИЗМ |
|
RБ |
t |
|
|
М2 _ ИЗМ dt LПр.МП _ ИЗМ . |
(27) |
||
2 |
|
|||
|
iМП2 0 |
|
||
Рисунок 6 – Структурная схема математической модели блока управления погружением винтовой сваи
Методом композиции в среде MATLAB-Simulink была построена блок-схема математической модели процесса погружения винтовой сваи (рисунок 7).
10