

1643
.pdfРисунок 7 – Структурная схема математической модели процесса погружения винтовой сваи
Четвертая глава. Приведены результаты теоретических исследований процесса погружения винтовой сваи, отражающие зависимости критерия эффективности устройства управления от основных его параметров.
Проведенный анализ структуры процесса и влияния определенных параметров устройства управления на процесс погружения позволил обосновать исследуемые параметры:
параметры регулирования гидронасосов – eH1 и eH2;
номинальные рабочие объемы гидронасосов – qHМ1 и qHМ2;
номинальные рабочие объемы гидромоторов – qМ1 и qМ2;
передаточные отношения приводов вращения и подачи сваи – iТР1,
iТР2, iМП1, iМП2 и RБ.
Анализ статических характеристик давлений в напорных гидролиниях приводов вращения и подачи сваи (рисунок 8) PMH1 и PMH2 позволил выявить
ограниченияпоисследуемымпараметрамqM1, iМП1, RБ, qM2 иiМП2: Для гидропривода вращения сваи:
|
|
2 M max |
P P . |
(28) |
||
|
|
|
||||
|
|
qМ1 iМП1 ММ1 |
|
С |
НОМ |
|
|
|
|
|
|
|
|
Для гидропривода подачи сваи: |
|
|
|
|
||
|
|
2 Fmax RБ |
|
P |
P , |
(29) |
|
|
|
|
|||
|
|
|
|
С |
НОМ |
|
|
2 qМ2 iМП2 ММ2 |
|
|
|||
где РС – давление на сливе гидромоторов, которое в установившемся режиме принимается равным атмосферному давлению (РС = РА).
11

Рисунок 8 – Статическая характеристика давления PMH1 от qM1 и iМП1
По результатам исследований статических и динамических характеристик процесса погружения, были обоснованы следующие основные параметры для инженерного анализа:
отношение номинального рабочего объема гидронасоса вращения qНМ1 к передаточному числу трансмиссии iТР1 – qНМ1/iТР1;
отношение номинального рабочего объема гидронасоса подачи
qНМ2 к передаточному числу трансмиссии iТР2 – qНМ2/iТР2.
Для решения одной из задач исследования были найдены функциональные зависимости принятого критерия эффективности от основных параметров устройства управления погружением винтовой сваи.
Таблица 1 Уравнения регрессии зависимостей tС = f(qНМ1/iТР1;qНМ2/iТР2) и σМ = f(qНМ1/iТР1; qНМ2/iТР2)
Функция |
Уравнение регрессии |
|
R2 |
|
676,9 – 0,846·(qНМ1/iТР1) – 0,4·(qНМ2/iТР2) + 1,1·10-3·(qНМ1/iТР1)2 + |
|
|
|
+2,97·10-4·(qНМ1/iТР1)·(qНМ2/iТР2) +1,02·10-3·(qНМ2/iТР2)2 – 6,96·10-7·(qНМ1/iТР1)3– |
|
|
tС |
– 3,45·10-7·(qНМ1/iТР1)2·(qНМ2/iТР2) + 3,39·10-7·(qНМ1/iТР1)(qНМ2/iТР2)2 |
– |
0,98 |
– 2,46·10-6·(qНМ2/iТР2)3 + 1,57·10-10·(qНМ1/iТР1)4 + |
|
||
|
+ 1,29·10-10·(qНМ1/iТР1)3·(qНМ2/iТР2) – 1,51·10-10·(qНМ1/iТР1)2·(qНМ2/iТР2)2– |
|
|
|
– 3,31·10-11·(qНМ1/iТР1)(qНМ2/iТР2)3 + 1,99·10-9·(qНМ2/iТР2)4 |
|
|
|
– 24,4 + 0,111·(qНМ1/iТР1) – 0,159·(qНМ2/iТР2) – 2·10-4·(qНМ1/iТР1)2 + |
|
|
|
+ 5,5·10-4·(qНМ1/iТР1)·(qНМ2/iТР2) – 1,54·10-4·(qНМ2/iТР2)2 + 1,33·10-7·(qНМ1/iТР1)3– |
|
|
σМ |
– 3,31·10-7·(qНМ1/iТР1)2·(qНМ2/iТР2) – 1,36·10-7·(qНМ1/iТР1)(qНМ2/iТР2)2 |
+ |
0,99 |
+ 4,04·10-7·(qНМ2/iТР2)3 – 2,92·10-11·(qНМ1/iТР1)4 + |
|
||
|
+ 5,05·10-11·(qНМ1/iТР1)3·(qНМ2/iТР2) + 1,42·10-10·(qНМ1/iТР1)2·(qНМ2/iТР2)2– |
|
|
|
– 1,73·10-10·(qНМ1/iТР1)(qНМ2/iТР2)3 – 1,99·10-10·(qНМ2/iТР2)4 |
|
|
12
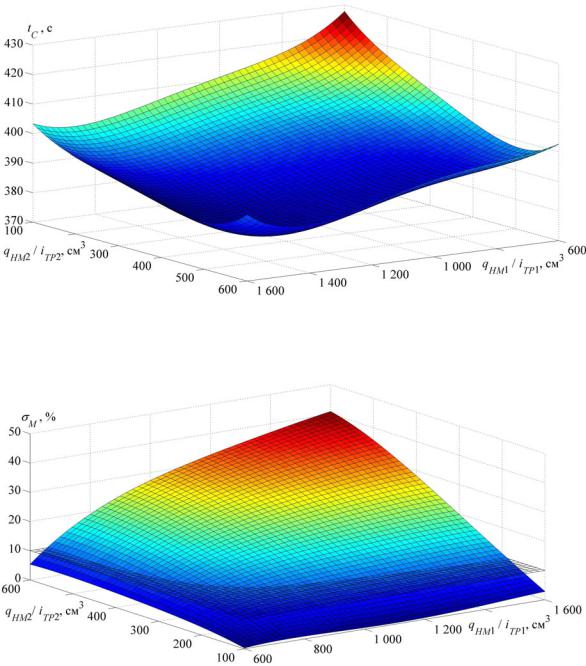
На рисунках 9 и 10 представлены графики полученных регрессионных зависимостей целевой функции tС и ограничения σМ критерия эффективности от основных параметров устройства управления qНМ1/iТР1 и qНМ2/iТР2.
Рисунок 9 – График регрессионной зависимости tС = f(qНМ1/iТР1;qНМ2/iТР2)
Рисунок 10 – График регрессионной зависимости σМ = f(qНМ1/iТР1;qНМ2/iТР2)
Анализ зависимости, приведенной на рисунке 9, показал, что целевая функция tC зависит от двух основных параметров устройства управления
qНМ1/iТР1 и qНМ2/iТР2. При определенных значениях qНМ1/iТР1 и qНМ2/iТР2 имеется минимум времени погружения сваи, что является признаком эффек-
тивной работы устройства управления погружением винтовой сваи.
13
Анализ зависимости, приведенной на рисунке 10, позволил сделать вывод о явной зависимости величины перерегулирования σM от основных параметров qНМ1/iТР1 и qНМ2/iТР2. Как видно из графика, увеличение обоих параметров ведет к увеличению перерегулирования σM.
При решении задачи оптимизационного синтеза принятый критерий эффективности представлен в виде целевой функции tC, ограничения σM и граничных условий для параметров (qНМ1/iТР1) и (qНМ2/iТР2):
|
|
|
tC f (qНМ1 / iТР1;qНМ 2 |
/ iТР2 ) min; |
|
|
|
|
|
|||||||||||||||||||
|
|
|
M |
|
f (q |
НМ1 |
/ i |
|
|
;q |
НМ 2 |
/ i |
) |
|
М _ ЗАД |
; |
|
|
|
|||||||||
|
|
|
|
|
|
|
ТР1 |
|
|
|
ТР2 |
|
|
|
|
|
|
(30) |
||||||||||
q |
НМ1 |
/ i |
|
|
|
q |
НМ1 |
/ i |
|
q |
НМ1 |
/ i |
|
|
|
; |
|
|||||||||||
q |
|
ТР1 |
min |
q |
|
ТР1 |
|
|
|
|
ТР1 |
max |
|
|
|
|||||||||||||
НМ2 |
/ i |
|
|
НМ 2 |
/ i |
2 |
q |
НМ 2 |
/ i |
2 |
|
|
|
. |
|
|||||||||||||
|
|
ТР2 |
min |
|
|
|
ТР |
|
|
|
ТР |
max |
|
|
||||||||||||||
Программный комплекс Matlab позволил провести оптимизацию функциональных зависимостей вида Z = f(x1, x2,…, xn) при помощи встроенного пакета «Optimization Tool» с возможностью дополнительных настроек оптимизации в автоматизированном режиме, посредством специального набора команд:
options = optimset('Algorithm','interior-point'); [x,f,flag] = fmincon(@tcopt,[qi1min qi2min],[],[],[],[],[qi1min qi2min], [qi1max qi2max],@sigmamopt,options);
qi1opt=x(1,1)
qi2opt=x(1,2)
tcnmin=f
В качестве примера была проведена оптимизация основных параметров устройства управления погружением винтовой сваи для сваезавинчивающей машины МЗС-219:
(qНМ1/iТР1)opt = 660,7958 см3; (qНМ2/iТР2)opt = 498,7607 см3; (tC)min = 395,3466 с. |
|||||||||||
После оптимизации значения номинальных рабочих объемов (qНМ1)opt |
|||||||||||
и (qНМ2)opt были выбраны с учетом условия (32) из следующего диапазона: |
|||||||||||
|
nД qНМ /iТР opt |
q |
НМ |
|
|
|
nД qНМ /iТР opt |
. |
(31) |
||
|
|
|
|
||||||||
|
nН _ max |
|
opt |
|
nН _ min |
|
|||||
|
|
|
|
|
|
|
|
||||
Рабочий диапазон частот вращения вала гидронасоса: |
|
||||||||||
|
nН _ min |
|
nД |
|
nН _ max , |
(32) |
|||||
|
|
iТР |
|||||||||
где nН_min и nН_max – минимальная и максимальная рабочая частота вращения вала гидронасоса.
В результате расчета были рекомендованы следующие значения парамет-
ров: (qНМ1)opt = 320 см3, (qНМ2)opt = 250 см3, (iТР1)opt = 0,484 и (iТР2)opt = 0,501.
Проведенные в четвертой главе анализ и синтез легли в основу инженерной методики и САПР основных параметров устройства управления погружением винтовой сваи.
14
Пятая глава. Инженерная методика, предложенная в данной работе, позволяет находить оптимальные значения основных параметров устройства управления погружением винтовой сваи и включает в себя следующие шаги:
1.Определение значений всех постоянных независимых параметров математической модели процесса погружения винтовой сваи.
2.Выбор номинальных рабочих объемов моторов приводов вращения и подачи сваи qМ1, qМ2 из стандартного ряда.
3.Вычисление коэффициентов передачи механизма погружения iМП1
иiМП2/RБ согласно номинальному давлению в гидросистеме РНОМ по усло-
виям (28) и (29).
4.Задание граничных условий для варьируемых параметров -
qНМ1/iТР1∩[(qНМ1/iТР1)min ÷ (qНМ1/iТР1)max] и qНМ2/iТР2∩[(qНМ2/iТР2)min ÷ (qНМ2/iТР2)max]
и функции ограничения критерия эффективности σМ ≤ σМ_ЗАД.
5. Исследование математической модели процесса погружения: по-
лучение численных значений целевой функции tC и функции ограничения |
|||||||||
σM в выбранном диапазоне значений основных параметров [(qНМ1/iТР1)min ÷ |
|||||||||
(qНМ1/iТР1)max] и [(qНМ2/iТР2)min ÷ (qНМ2/iТР2)max]. |
|
|
|
||||||
σM |
6. |
Аппроксимация |
зависимостей |
tC |
= |
f(qНМ1/iТР1;qНМ2/iТР2) и |
|||
= f(qНМ1/iТР1;qНМ2/iТР2): получение численных значений коэффициентов |
|||||||||
уравнений регрессии – p00, p01… pij и коэффициента детерминации R2 по |
|||||||||
численным значениям tC |
и σM. |
|
|
|
|
|
|||
|
7. |
Оптимизация параметров (qНМ1/iТР1) и (qНМ2/iТР2): решение задачи |
|||||||
условной оптимизации основных параметров согласно принятой целевой |
|||||||||
функции tС |
= f(qНМ1/iТР1;qНМ2/iТР2) → min, |
функции |
ограничения |
||||||
σM |
= |
f(qНМ1/iТР1;qНМ2/iТР2) ≤ |
σN_ЗАД |
и |
граничным |
условиям |
|||
qНМ1/iТР1∩[(qНМ1/iТР1)min ÷ (qНМ1/iТР1)max] иqНМ2/iТР2∩[(qНМ2/iТР2)min ÷ (qНМ2/iТР2)max]. |
|||||||||
|
8. |
Задание рабочих частот вращения насосов вращения и подачи: |
|||||||
nH1∩[nH1_min ÷ nH1_max] и nH2∩[nH2_min ÷ nH2_max]. |
|
|
|
||||||
|
9. |
Вычисление диапазонов оптимальных значений номинальных ра- |
|||||||
бочих объемов насосов вращения и подачи сваи [(qНМ1)min ÷ (qНМ1)max] и
[(qНМ2)min ÷ (qНМ2)max] согласно условию (31).
10. Выбор значений (qНМ1)opt и (qНМ2)opt из стандартного ряда с учетом
полученных диапазонов [(qНМ1)min ÷ (qНМ1)max] и [(qНМ2)min ÷ (qНМ2)max].
11. Расчет оптимальных значений передаточных чисел трансмиссий
насосов вращения и подачи сваи (iТР1)opt и (iТР2)opt.
Для автоматизации проектирования основных параметров устройства управления был разработан алгоритм работы САПР (рисунок 11), основанный на приведенной инженерной методике.
Программной реализацией предложенного алгоритмы САПР является модуль расчета оптимальных значений основных параметров устройства управления погружением винтовой сваи, разработанный в среде GUI Builder программного комплекса MATLAB. Окно расчета, являющееся финальной частью программы, представлено на рисунке 12.
15
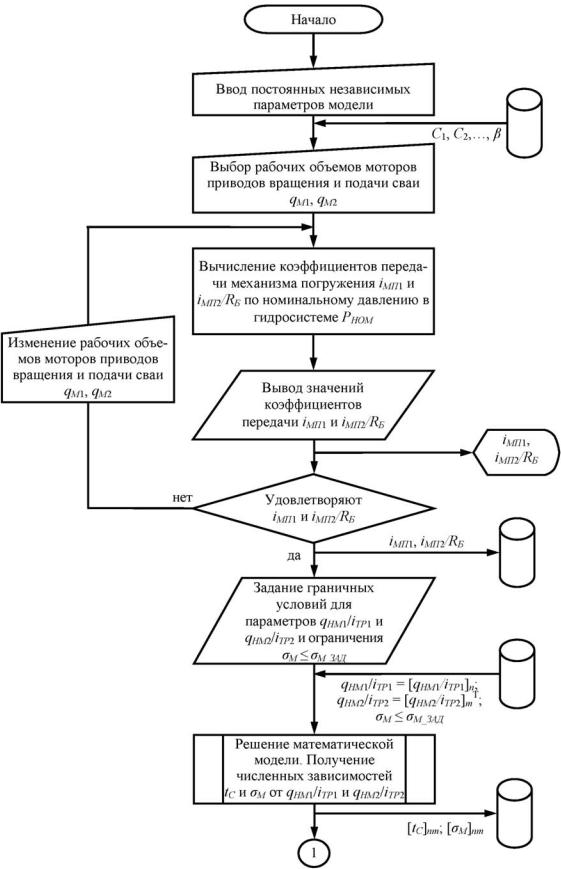
Рисунок 11 – Блок-схема алгоритма работы САПР основных параметров устройства управления погружением винтовой сваи
16

Рисунок 11 – Блок-схема алгоритма работы САПР основных параметров устройства управления погружением винтовой сваи (продолжение)
17
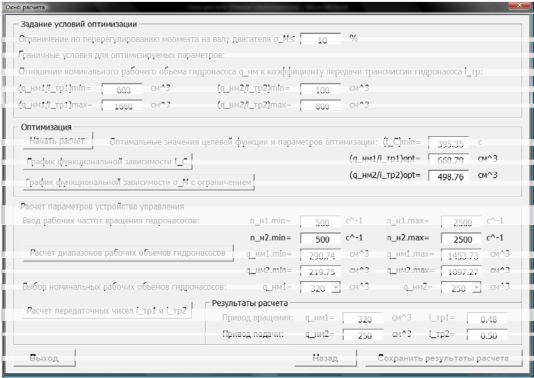
Рисунок 12 – Окно расчета основных параметров устройства управления погружением винтовой сваи
ОСНОВНЫЕ РЕЗУЛЬТАТЫ И ВЫВОДЫ
1.Обоснованный критерий эффективности устройства управления погружением винтовой сваи наиболее явно характеризует качество работы устройства управления и позволяет оценивать эффективность конструкторских решений при выборе его основных параметров.
2.Разработанная математическая модель процесса погружения винтовой сваи позволила исследовать влияние параметров процесса погружения винтовой сваи на эффективность работы устройства управления в статическом и динамическом режимах.
3.Автоматизация процессов анализа и синтеза позволила выявить функциональные зависимости принятого критерия эффективности от основных параметров устройства управления погружением винтовой сваи и оптимизировать их значения.
4.Разработанная инженерная методика «Выбор основных параметров устройства управления погружением винтовой сваи» и алгоритм работы системы автоматизации проектирования основных параметров устройства управления погружением винтовой сваи позволяют на стадии проектирования в автоматизированном режиме решать задачи анализа и синтеза оптимальных значений основных параметров устройства управления.
18
Основные положения диссертации опубликованы в следующих работах:
В изданиях, рекомендованных ВАК:
1. Денисова Е.Ф., Щербаков В.С. Система автоматизации моделирования процесса погружения винтовой сваи // Вестник Воронежского государственного технического университета. – Воронеж: ВГТУ, 2010. – № 8, Том 6. –
с. 184 – 189.
В других изданиях:
2.Денисова Е.Ф., Лобанова А.С. Обзор оборудования для погружения винтовых свай // Межвузовский сборник трудов молодых ученых, аспирантов и студентов. – Омск: СибАДИ, 2009. – Вып.6. –с.25 – 27.
3.Денисова Е.Ф. Определение величины крутящего момента силы при погружениивгрунтвинтовойсваи// «Теоретическиезнаниявпрактическиедела». Сборник научных статей межвузовской научно-практической конференции аспирантов, студентов и молодых исследователей, 9 апреля 2009. – Омск: Филиал ГОУВПО«РосЗИТЛП» вг. Омске, 2009. – книга2. – с. 222 – 223.
4.Денисова Е.Ф. Математическая модель рабочего органа сваезавинчивающей машины // Сборник научных трудов. – Омск: ОИВТ (филиал) ГОУ ВПО НГАВТ, 2009. – Вып.7. – с. 45 – 48.
5.Денисова Е.Ф. Определение работы, затраченной на погружение винтовой сваи // «Развитие дорожно-транспортного комплекса и строительной инфраструктуры на основе рационального природопользования». Материалы IV Всероссийской научно-практической конференции студентов, аспирантов
имолодых ученых, 20 – 21 мая 2009. – Омск: СибАДИ, 2009. – книга 1. – с. 314 – 317.
6.Денисова Е.Ф. Математическая модель процесса заглубления винтовой сваи // Материалы 63-й научно-технической конференции СибАДИ, 9 – 11 декабря 2009. – Омск: СибАДИ, 2009. – книга 3. – с. 53 – 55.
7.Денисова Е.Ф. Математическая модель взаимодействия рабочего органа сваезавинчивающей машины с грунтом при погружении сваи // Сборник научных трудов. – Омск: ОИВТ (филиал) ГОУ ВПО НГАВТ, 2010. – Вып.8. –
с. 60 – 64.
8.Денисова Е.Ф. Структура процесса погружения винтовой сваи // Материалы 64-й научно-технической конференции ГОУ «СибАДИ» в рамках Юбилейного Международного конгресса «Креативные подходы в образовательной, научной и производственной деятельности», посвященного 80-летию академии, 17 – 19 ноября2010. – Омск: СибАДИ, 2010. – книга1. – с. 294 – 296.
9.Денисова Е.Ф. Математическое описание механизма погружения винтовой сваи // «Развитие дорожно-транспортного комплекса и строительной инфраструктуры на основе рационального природопользования». Материалы V Всероссийской научно-практической конференции студентов, аспирантов и молодых ученых, 19 – 21 мая 2010. – Омск: СибАДИ, 2010. – книга 2. – с. 238 – 241.
19
Подписано к печати 16.05.2011. Формат 60 90 1/16. Бумага писчая Оперативный способ печати Гарнитура Times New Roman Усл. п. л. 1,25, уч.-изд. л. 0,95.
Тираж 120 экз. Заказ № 128 Цена договорная
______________________________________________________
Отпечатано в полиграфическом отделе УМУ СибАДИ
644080, г. Омск, пр. Мира, 5.
20